1.本发明涉及微纳检测技术领域,尤其涉及一种快速结构光数字全息测量系统及方法。
背景技术:
2.随着科技的不断发展,各种功能的微纳结构不停涌现,为了追求更加卓越的性能,微纳结构不断向更精细、更复杂的方向发展。数字全息作为一种光学测量手段,相较于其他测量方法免去了扫描步骤,可实现面形信息的快速构建,具有测量范围广、高分辨率、鲁棒性强、重建速度快等优势,在微纳结构测量领域中有很大潜力。根据阿贝成像理论,数字全息的横向分辨率受限,其最高仅能实现1/2波长的成像分辨率。如何突破衍射极限,提升数字全息系统的分辨率,一直是检测领域关注的难点问题之一。
3.随着研究的深入,研究人员发现结构光照明超分辨技术与数字全息显微镜具有良好的兼容性。为了提升数字全息的测量分辨率,研究者将结构光照明超分辨技术引入数字全息测量光路,形成了全新的结构光数字全息显微方案。但为保证超分辨信息的解调和各向同性,该方案需要采集多幅不同方向带有相移量的结构光数字全息图。例如,申请公布号为cn 109709786 a的中国发明专利公布了“一种超分辨率数字全息成像系统和成像方法”,其通过加载不同方向的结构光照射待测物体,通过对采集到的数字全息图进行解调,实现了对物体更高分辨率的成像;然而,该方法需要多次采集结构光数字全息图,采集效率较低。
4.近年来,众多研究者提出了不同的测量方案以减少相移、甚至无相移并改进后续解调算法以增加测量系统的时间分辨率。然而,现有的方案在实现无相移的过程中,都是通过迭代的形式对混叠频谱进行解调,不能保证其解调过程的实时性,并且装置十分复杂,限制了结构光数字全息技术在粒子场测量、流体场测定和晶体制备监测等众多微纳测量领域的应用。
技术实现要素:
5.本发明的目的之一至少在于,针对如何克服上述现有技术存在的问题,提供一种快速结构光数字全息测量系统及方法,利用偏振复用技术,通过偏振分光元件,在测量过程中引入空间相移,通过同一光电探测器单次曝光就可采集到多幅带有相移差的结构光数字全息图,提高了图像的采集效率和测量的实时性。
6.为了实现上述目的,本发明采用的技术方案包括以下各方面。
7.一种快速结构光数字全息测量系统,包括:光源、第二显微物镜、第三非偏振分光元件、偏振分光元件、光电探测器和计算机;
8.所述光源配置为产生测量光和参考光;
9.所述测量光配置为分束成一束45
°
线偏振光和一束圆偏振光,所述45
°
线偏振光与圆偏振光干涉后形成结构光,所述结构光照明待测样品后,经第二显微物镜形成物光,所述
物光入射到第三非偏振分光元件中;
10.所述参考光配置为形成45
°
线偏振光,所述参考光入射到第三非偏振分光元件中,与物光合束后,形成合束光;所述合束光经偏振分光元件分束,形成s光和p光,所述s光和p光入射到光电探测器中;
11.所述计算机与光电探测器连接,并配置为解调出结构光数字全息图的超分辨信息。
12.优选的,还包括偏振片、扩束准直镜、第一非偏振分光元件、第二非偏振分光元件、空间光调制器、聚光透镜、滤光片、第一显微物镜、第二显微物镜、tube镜和反光镜;
13.所述光源产生的入射光经偏振片产生线偏振光,所述线偏振光经扩束准直镜扩束后入射到第一非偏振分光元件中,经第一非偏振分光元件分为相互垂直的参考光和测量光;
14.所述参考光经反光镜反射后,入射到第三非偏振分光元件中;
15.所述测量光经第二非偏振分光元件入射到空间光调制器中,经空间光调制器调制后产生多级次的衍射光束,衍射光束反射回第二非偏振分光元件中,经第二非偏振分光元件反射到聚焦透镜、滤光片和第一显微物镜中形成结构光,所述结构光照明待测样品后,经第二显微物镜和tube镜形成物光,所述物光入射到第三非偏振分光元件中。
16.优选的,所述空间光调制器为反射式的相位型空间光调制器,其内加载有二值衍射光栅。
17.优选的,所述滤光片横截面形状为正六边形,其上设置有呈正六边形排布的小孔阵列,小孔口径为0.5-2mm。
18.优选的,所述滤光片与x轴的夹角为45
°
。
19.优选的,所述第一非偏振分光元件、第二非偏振分光元件和第三非偏振分光元件均为非偏振分光棱镜、分光透镜或分光平片。
20.优选的,所述滤光片的表面上与滤光片形状相适配的圆偏振薄膜,所述圆偏振薄膜将滤光片均分为两半,所述圆偏振薄膜的透光率大于或等于99.9%。
21.优选的,所述偏振分光元件为偏振分光棱镜或沃拉斯顿棱镜。
22.优选的,所述光电探测器为面阵彩色相机、线阵彩色相机、面阵黑白相机或线阵黑白相机,所述光电探测器的感光元件类型为cmos或ccd。
23.一种快速结构光数字全息测量方法,其采用上述的快速结构光数字全息测量系统,包括以下步骤:
24.步骤一:采集结构光数字全息图;
25.步骤二:对采集到的结构光数字全息图进行全息重建;
26.步骤三:对全息重建得到的两幅结构光光场复振幅信息进行超分辨解调;
27.步骤四:在空间光调制器slm上加载不同方向的相位光栅,重复步骤一到步骤三,以获得各向同性的三维超分辨率结果。
28.综上所述,由于采用了上述技术方案,本发明至少具有以下有益效果:
29.本发明采用由45
°
线偏振光和圆偏振光干涉形成的复合结构光照明待测物体,结构光照明待测物体后形成物光,物光与45
°
线偏振参考光通过非偏振分光元件合束,合束光
通过偏振分光元件分为固定相位差为的两束光,通过同一光电探测器单次曝光就可采集两幅结构光数字全息图,提高了图像的采集效率和测量的实时性。
30.通过在空间光调制器内加载不同角度的二值衍射光栅,能够采集到多个方向的结构光数字全息图,并且每次采集均可采集到两张结构光数字全息图,对这两张结构光数字全息图进行解调,能够获得各向同性的三维超分辨率结果。
31.本发明的测量光路中,通过滤光片将经过空间光调制器调制的多级次衍射光束分为线偏振光和圆偏振光,并通过偏振分光元件引入空间相移,系统结构更加简单,能够扩展快速结构光数字全息测量系统的应用领域。
附图说明
32.图1是本发明示例性实施例的快速结构光数字全息测量原理图。
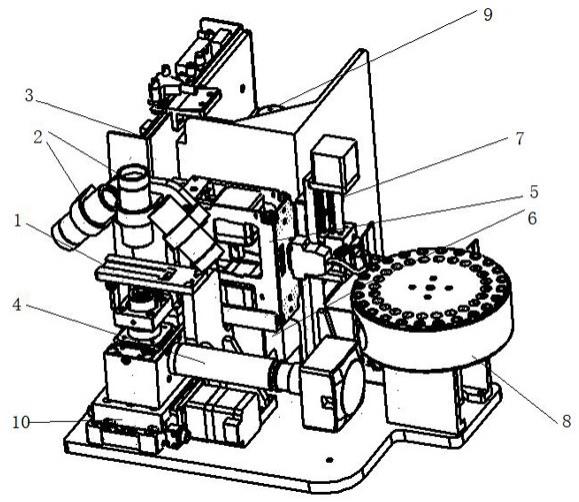
33.图2是本发明示例性实施例的快速结构光数字全息测量系统结构示意图。
34.图3是空间光调制器加载的不同方向的衍射光栅图。
35.图4是本发明示例性实施例的超分辨解调算法流程示意图。
36.图中标识:1-he-ne激光器,2-偏振片,3-扩束准直镜,4-第一非偏振分光元件,5-第二非偏振分光元件,6-空间光调制器,7-聚焦透镜,8-滤光片,9-第一显微物镜,10-待测样品,11-第二显微物镜,12-tube镜,13-反光镜,14-第三非偏振分光元件,15-偏振分光元件,16-光电探测器。
具体实施方式
37.下面结合附图及实施例,对本发明进行进一步详细说明,以使本发明的目的、技术方案及优点更加清楚明白。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
38.如图1所示,本发明示例性实施例的快速结构光数字全息测量原理为:一束45
°
线偏振光与一束圆偏振光干涉,形成结构光照明待测样品10,通过第二显微物镜11产生物光,物光正入射到第三非偏振分光元件14上;另一束45
°
线偏振光作为参考光入射到第三非偏振分光元件14上,物光和参考光合束后入射到偏振分光元件15中,分束成s光和p光,s光和p光分别相干叠加,产生两幅带有固定相移差的结构光数字全息图,被光电探测器16接收,通过对接收到的数字全息图进行解调,就可实现三维超分辨成像。
39.本发明采用45
°
线偏振光和圆偏振光干涉形成的复合结构光照明待测物体,并结合偏振复用技术,在测量过程中引入空间相移,提高了结构光数字全息测量的实时性;通过偏振分光元件15将物光、参考光的s光和p光分离出来,使两者的s光、p光分别干涉,从而形成两幅带有相位差的结构光数字全息图,两幅结构光数字全息图被同一光电探测器接收,因此单次曝光就可采集两幅全息图,大大提高了图像的采集效率,提高了测量的实时性。
40.如图2所示,本发明示例性实施例的快速结构光数字全息测量系统结构包括:he-ne激光器1,he-ne激光器1光路方向上同轴设置有偏振片2和扩束准直镜3,he-ne激光器1产生入射光,入射光经偏振片2和扩束准直镜3产生45
°
线偏振宽光束,线偏振光束入射到第一非偏振分光元件4中,经第一非偏振分光元件4分为相互垂直的参考光和测量光;沿参考光
路方向依次设置有反光镜13和第三非偏振分光元件14,沿参考光路方向,参考光经反光镜13反射到第三非偏振分光元件14中;沿测量光路方向依次设置有第二非偏振分光元件5、空间光调制器6、聚光透镜7、滤光片8、第一显微物镜9、待测样品10、第二显微物镜11、tube镜12;沿测量光路方向,测量光经第二非偏振分光元件5入射到空间光调制器6中,经空间光调制器6调制产生多级次的衍射光束,衍射光束经第二非偏振分光元件5反射到聚焦透镜7和第一显微物镜9组合成的4f系统中,4f系统的傅里叶平面处设置有滤光片8,多级次的衍射光经4f系统后只留下
±
1级的结构光,结构光照射待测样品10后,产生的图像经第二显微物镜11放大后,透射过tube镜12形成物光;物光入射到第三非偏振分光元件14中,与参考光合束;沿合束光路方向依次设置有偏振分光元件15和光电探测器16,合束光经偏振分光元件15分为s光和p光,s光和p光分别干涉,产生两幅相移量为π/2的结构光数字全息图被光电探测器16采集;光电探测器16与计算机(图中未示出)连接,计算机接通过相移算法解调出结构光数字全息图的超分辨信息,重建物光波,实现三维超分辨成像。
41.以上光路中,he-ne激光器1产生波长632.8nm的入射光,入射光还可为其他波长,入射光也可由其他激光器产生,还可以由汞灯或led灯等非相干光源产生。偏振片2与x轴(水平方向)的夹角为45
°
,扩束准直镜3对光斑产生不小于15倍的扩束效果。
42.空间光调制器6为反射式的相位型空间光调制器,其内加载有二值衍射光栅,光栅周期t为100~200μm,光栅加载角度可调,参考图3,光栅的加载角度分别为0
°
、60
°
和120
°
;空间光调制器6用于对测量光进行调制,通过加载不同方向的衍射光栅,产生不同方向的结构光,从而可以采集多幅不同方向带有相移量的结构光数字全息图,确保了超分辨信息的各向同性。不同方向的结构光除采用空间光调制器产生外,还可以通过物理光栅、双棱镜等方式产生。
43.滤光片8横截面形状为正六边形,其上设置有呈正六边形排布的小孔阵列,小孔口径为0.5-2mm,滤光片8的表面上设置有与滤光片形状相适配的圆偏振薄膜,圆偏振薄膜将滤光片8均分为两半,圆偏振薄膜的透光率大于或等于99.9%,圆偏振薄膜用于将线偏振光转换为圆偏振光。
44.第一非偏振分光元件4、第二非偏振分光元件5和第三非偏振分光元件14优选为非偏振分光棱镜,还可以是分光透镜、分光平片等可实现非偏振分光的光学元件;偏振分光元件15优选为偏振分光棱镜,还可以是沃拉斯顿棱镜等可实现偏振分光的光学元件。
45.光电探测器16可以是面阵彩色相机、线阵彩色相机、面阵黑白相机或线阵黑白相机,相机的感光元件类型为cmos或ccd。
46.通过上述的快速结构光数字全息测量系统,可以同时得到两幅带有固定相移差的结构光数字全息照明图,计算机通过基于相移的结构光超分辨解调算法解调出超分辨信息,重建物光波,就可实现三维超分辨成像,提升了测量的实时性。
47.本发明的快速结构光数字全息测量系统中,物光除采用图1、图2所示的透射方式形成,还可以采用反射方式形成。
48.本发明的快速结构光数字全息测量方法包括以下步骤:
49.步骤一:采集结构光数字全息图;假定结构光光场的两个干涉光束为平面波,则光束可以表示为:
[0050][0051][0052]
其中,o1为45
°
线偏振光,o2为右旋圆偏振光,a为光束的振幅,f为空间频率,(x,y)为二维空间的坐标向量。进一步的,物光的s分量和p分量可以表示为:
[0053][0054][0055]
其中,为待测样品的相位信息,假定参考光为与水平方向呈45
°
的线偏振平面波,则可以表示为:
[0056][0057]
其中,为参考光的载频信息,b为参考光振幅,物光和参考光在通过偏振分光元件之后,p光和s光部分分别相干叠加产生固定相位差为的结构光数字全息光场:
[0058][0059][0060]
步骤二:对采集到的结构光数字全息图进行全息重建,使用角谱法完成数值重建:
[0061][0062]
上式中,fft和ifft分别代表快速傅里叶变换及其逆变换,d表示物光波的衍射传播距离,f
x
和fy分别是x和y方向的空间频率。为了去除零级项和孪生项,在空间频域中使用适当的频谱窗口w(f
x
,fy)来实现滤波。通过频谱平移函数s(f
x
,fy)将滤波后的频谱平移至中心位置可以消除图像的一阶像差。对于各种光学透镜产生的高阶像差,采用基于共轭参考全息图的标定方法来移除相位畸变的影响。其中,补偿项能够通过记录无样品的空白全息图来构建。
[0063]
步骤三:对全息重建得到的两幅结构光光场复振幅信息进行超分辨解调,其过程如图4所示:由于两个频谱信息相互混叠,要完整恢复频谱信息,通过变换等式可以得到分离的两部分频谱:
[0064]
[0065]
然后将频谱igl(f)、igh(f)移回原来的位置,并将处于原始位置的频谱信息进行叠加与融合,以扩展频域信息。
[0066]
步骤四:在空间光调制器slm上加载不同方向的相位光栅,重复步骤一到三,以获得各向同性的三维超分辨率结果。
[0067]
以上所述,仅为本发明具体实施方式的详细说明,而非对本发明的限制。相关技术领域的技术人员在不脱离本发明的原则和范围的情况下,做出的各种替换、变型以及改进均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。