1.本发明涉及汽车风窗检测技术领域,具体涉及一种汽车风窗表面检测系统和方法。
背景技术:
2.随着自动化设备在汽车总装的应用,汽车前后风挡玻璃的安装越来越多的采用自动安装形式。汽车总装车间生产线的风挡玻璃自动安装工位,其安装区域为封闭区域,人员无法进入检查或操作。在进入风挡安装之前,人工将a柱护板上的扬声器线束与车身线束连接,然后将a柱护板安装到位,此时,正常状态是a柱护板已经将线束遮盖,不外漏。但实际装车中发现,操作人员经常出现线束未捋好的情况,此时将a柱护板卡接到a柱上,会导致部分线束被挤压在风窗上表面,风挡自动安装时,将此部分外漏线束被夹在风挡密封胶内,则导致风挡漏雨。
3.目前多采用安装后人工检查的方式避免上述问题,但是这种方式容易出现漏查的问题,并且检查效率低。因此,亟需研发一种风窗表面异物检测方法,在风挡玻璃自动安装前,自动检测玻璃安装表面是否有异物,以防止在玻璃安装过程中,夹入玻璃与风窗之间,产生漏雨。
技术实现要素:
4.为了解决现有检测方法容易出现漏查情况的问题,本发明提出了一种汽车风窗表面检测系统和方法。
5.本发明的技术方案如下:
6.一种汽车风窗表面检测系统,所述系统包括机器人控制模块、机器人固定梁、显示屏模块、第一固定架吊梁、第二固定架吊梁、第三固定架吊梁、机器人、数据处理模块以及扫描相机;
7.所述第一固定架吊梁、第二固定架吊梁以及第三固定架吊梁分别固定于所述机器人固定梁上,用于为机器人固定梁与外部件连接时辅助固定并补充高度落差;所述扫描相机安装于所述机器人头部,所述机器人控制模块固定在机器人固定梁上,用于控制机器人运动并带动所述扫描相机扫描风窗,所述数据处理模块用于接收扫描图像,将图像转换为实际窗口的三维模型,与标准模型对比识别异物所在位置,并传输至所述显示屏模块实现异物位置显示。
8.优选地,所述设备还包括传感器,所述传感器安装在机器人固定梁上,用于监测机器人与车身的距离,以防止发生撞击。
9.优选地,所述机器人数量为2个,2个所述机器人在所述机器人固定梁上对称设置。
10.本发明还提供了一种汽车风窗表面检测方法,所述方法应用如上所述的系统,所述方法包括以下步骤:
11.s1、根据调试车身,建立窗口标准模型;
12.s2、两个协作机器人固定在车间钢结构上,并且位于窗框的斜上方,通过两个协作机器人与扫描相机连接,两个机器人带着相机扫描汽车风窗各半圈;
13.s3、将扫描结果生成三维点云数据,然后将三维点云数据转换为实际窗口的三维模型,再将两个分散的模型拟合成一个整体模型;
14.s4、通过比对三维模型和标准模型的差异,计算偏差数据,识别异物,设备进行报警并显示。
15.优选地,步骤s3中所述三维点云数据使用轮廓仪获取,包括x、y和z三个方向的坐标数据。
16.优选地,步骤s3中所述三维点云数据到三维模型的转换,具体包括:
17.(1)按照坐标对三维点云数据进行排列,构成一幅三维点云图像;
18.(2)使用halcon的算子xyz_to_object_model_3d转成三维模型。
19.优选地,步骤s4中所述的偏差数据具体采用halcon中的模型匹配算子find_surface_model匹配计算获得。
20.本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序执行如上所述的汽车风窗表面检测方法。
21.本发明还提供了一种电子设备,包括处理器和存储器,其中处理器、存储器通过通信总线完成相互间的通信;存储器,用于存储计算机程序;处理器,用于执行存储器上所存放发计算机程序时,实现如上所述的汽车风窗表面检测方法。
22.本发明解决了现有检测方法容易出现漏查情况的问题,具体有益效果为:
23.1.本发明提供的检测系统,采用机器人带动相机移动式扫描,设备柔性大,可兼容多种车型,应用前景好;
24.2.本发明可应用于汽车总装车间生产线风挡玻璃自动安装工位,本发明提供的检测方法可靠、效率高且检测结果准确,避免了人工目测导致的检查不全面的问题,从而更好的规避由此造成的风挡玻璃漏雨现象发生。
附图说明
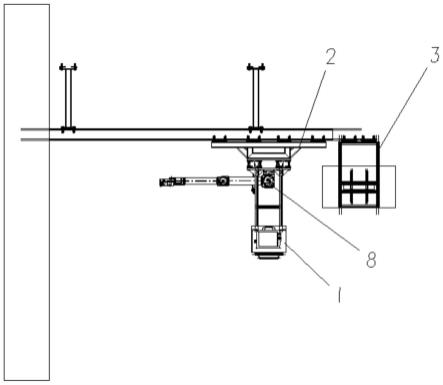
25.图1为本发明提供的汽车风窗表面检测系统主视示意图;
26.图2为本发明提供的汽车风窗表面检测系统左视示意图;
27.图3为本发明提供的汽车风窗表面检测系统俯视示意图。
28.附图标记说明:
29.1、机器人控制模块;2、机器人固定梁;3、显示屏模块;4、第一固定架吊梁;5、第二固定架吊梁;6、第三固定架吊梁;7、传感器;8、机器人。
具体实施方式
30.为使本发明的技术方案更加清楚,下面将结合本发明的说明书附图,对本发明实施例中的技术方案进行清楚、完整地描述,需要说明的是,以下实施例仅用于更好地理解本发明的技术方案,而不应理解为对本发明的限制。
31.实施例1.
32.本实施例提供了一种汽车风窗表面检测系统,所述系统包括机器人控制模块1、机
器人固定梁2、显示屏模块3、第一固定架吊梁4、第二固定架吊梁5、第三固定架吊梁6、机器人8、数据处理模块以及扫描相机;
33.所述第一固定架吊梁4、第二固定架吊梁5以及第三固定架吊梁6分别固定于所述机器人固定梁2上,用于为机器人固定梁2与外部件连接时辅助固定并补充高度落差;所述扫描相机安装于所述机器人8头部,所述机器人控制模块1固定在机器人固定梁2上,用于控制机器人8运动并带动所述扫描相机扫描风窗,所述数据处理模块用于接收扫描图像,将图像转换为实际窗口的三维模型,与标准模型对比识别异物所在位置,并传输至所述显示屏模块3实现异物位置显示。
34.为了更好理解本实施例内容,所述汽车风窗表面检测系统主视示意图参见图1所示,左视示意图参见图1所示,俯视示意图参见图3所示。本实施例提供的检测系统采用机器人带动相机移动式扫描,设备柔性大,可兼容多种车型,应用前景好,相比传统的人工目测方式,避免了检查不全面的问题,从而更好的规避由此造成的风挡玻璃漏雨现象发生。
35.实施例2.
36.本实施例为对实施例1的进一步举例说明,所述设备还包括传感器7,所述传感器7安装在机器人固定梁2上,用于监测机器人与车身的距离,以防止发生撞击。
37.实施例3.
38.本实施例为对实施例1的进一步举例说明,所述机器人数量为2个,2个所述机器人在所述机器人固定梁上对称设置。
39.本实施例采用两个对称设置的机器人,带动扫描相机扫描汽车风窗,扫描速度更快,扫描范围更大,可兼容各种宽度车型,后续仅需将两个机器人扫描结果合成即可实现风窗模型的转换。
40.实施例4.
41.本实施例提供了一种汽车风窗表面检测方法,所述方法应用如实施例1-3中任一项所述的系统,所述方法包括以下步骤:
42.s1、根据调试车身,建立窗口标准模型;
43.s2、两个协作机器人固定在车间钢结构上,并且位于窗框的斜上方,通过两个协作机器人与扫描相机连接,两个机器人带着相机扫描汽车风窗各半圈;
44.s3、将扫描结果生成三维点云数据,然后将三维点云数据转换为实际窗口的三维模型,再将两个分散的模型拟合成一个整体模型;
45.s4、通过比对三维模型和标准模型的差异,计算偏差数据,识别异物,设备进行报警并显示。
46.本实施例可应用于汽车总装车间生产线风挡玻璃自动安装工位,采用机器人带动相机移动式扫描,设备柔性大,可兼容多种车型,应用前景好;本实施例提供的检测方法可靠、效率高且检测结果准确,避免了人工目测导致的检查不全面的问题,从而更好的规避由此造成的风挡玻璃漏雨现象发生。
47.实施例5.
48.本实施例为对实施例4的进一步举例说明,步骤s3中所述三维点云数据使用轮廓仪获取,包括x、y和z三个方向的坐标数据。
49.实施例6.
50.本实施例为对实施例5的进一步举例说明,步骤s3中所述三维点云数据到三维模型的转换,具体包括:
51.(1)按照坐标对三维点云数据进行排列,构成一幅三维点云图像;
52.(2)使用halcon的算子xyz_to_object_model_3d转成三维模型。
53.实施例7.
54.本实施例为对实施例4的进一步举例说明,步骤s4中所述的偏差数据具体采用halcon中的模型匹配算子find_surface_model匹配计算获得。
55.实施例8.
56.本实施例提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序执行如实施例4-7中任一项所述的汽车风窗表面检测方法。
57.实施例9.
58.本实施例提供了一种电子设备,包括处理器和存储器,其中处理器、存储器通过通信总线完成相互间的通信;存储器,用于存储计算机程序;处理器,用于执行存储器上所存放发计算机程序时,实现如实施例4-7中任意一项所述的汽车风窗表面检测方法。
59.以上应用了具体实施例对本发明的原理及实施方式进行了阐述,需要说明的是,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在不脱离本发明的原理和精神的情况下对这些实施例进行简单变化、修改、替换和变型,均应落入到本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。