1.本发明涉及物料输送技术领域,具体是一种自动翻斗式输送机。
背景技术:
2.在工业生产的过程中,常常需要对物料进行输送,这就需要使用到输送机,通过输送机可以把物料从一个位置输送到另一个位置,现有输送设备有斗式提升机、螺旋输送机、皮带输送机、板式输送机、管链输送机、气力输送机等。
3.但是,对于不同性状的物料、不同的输送高度和输送距离以及不同的输送环境,需要选择合适的输送设备,对于既需要垂直提升又需要水平位移的块状、糊状、有毒有害的物料输送,现有输送设备存在着明显地输送效率低、能耗大、价格昂贵等问题。
技术实现要素:
4.本发明的目的在于提供一种自动翻斗式输送机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种自动翻斗式输送机,包括料仓和轨道梁,所述料仓的上端的一侧安装有一组导轨,所述轨道梁的下端滑动连接有电动葫芦,所述电动葫芦的下端连接有吊臂,所述吊臂的下端固定连接有盛料斗,所述盛料斗的外侧的前后端均安装有翻转轴,所述翻转轴的外侧安装有滚轮,所述电动葫芦通过导线与外部的电控箱电性连接。
7.作为本发明再进一步的方案:所述盛料斗的运动轨迹上对应设置有四个位置传感器,分别为位置传感器a、位置传感器b、位置传感器c和位置传感器d,所述盛料斗在垂直吊装的过程中靠近下端时对应的为位置传感器a,且盛料斗在垂直吊装的过程中靠近上端时对应的为位置传感器b,所述盛料斗在水平移动的过程中靠近翻转轴的左侧时对应的为位置传感器c,且盛料斗沿着导轨进行翻转的过程中靠近翻转轴的下侧时对应的为位置传感器d,所述位置传感器a、位置传感器b、位置传感器c和位置传感器d也均与外部的电控箱电性连接。
8.作为本发明再进一步的方案:所述翻转轴固定在盛料斗的重心偏下部位,且翻转轴与盛料斗通过加强筋固定连接,所述翻转轴与滚轮转动连接。
9.作为本发明再进一步的方案:两个所述滚轮的位置与两个导轨相对应,所述滚轮与导轨的结构相匹配,两个所述导轨之间的中心距与两个滚轮之间的中心距相等,两个所述滚轮之间的间距大于盛料斗的上口宽度,从而便于盛料斗翻转卸料。
10.作为本发明再进一步的方案:所述电动葫芦的运动动作与位置传感器a、位置传感器 b、位置传感器c和位置传感器d通过电连接互锁。
11.作为本发明再进一步的方案:所述电动葫芦和吊臂处于相对垂直状态,所述吊臂安装在盛料斗的上口中部。
12.与现有技术相比,本发明的有益效果:
13.本发明通过四个位置传感器对盛料斗的行程轨迹进行限定,最大限度地减少盛料斗的运动距离,去除电动葫芦不必要的运动动作,提高工作效率,降低电力能源损耗,通过翻转轴、滚轮和导轨的相互配合,通过盛料斗的自身重量作用,使得盛料斗翻转卸料,使得卸料更加便捷,且整个输送机的结构简单,操作维护方便,自动化程度高,能够解决既需要垂直提升又需要水平位移的块状、糊状、有毒有害的物料输送,克服现有输送设备输送效率低、能耗大、价格昂贵等不足。
附图说明
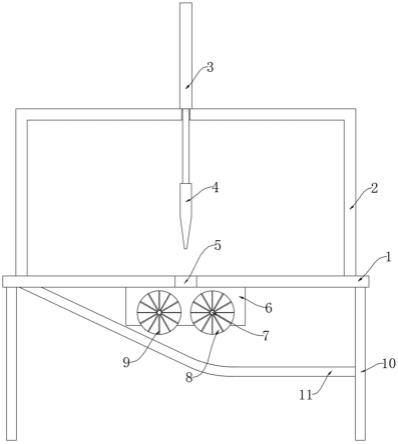
14.图1为一种自动翻斗式输送机中实施例一的结构示意图;
15.图2为一种自动翻斗式输送机中实施例一的左视示意图;
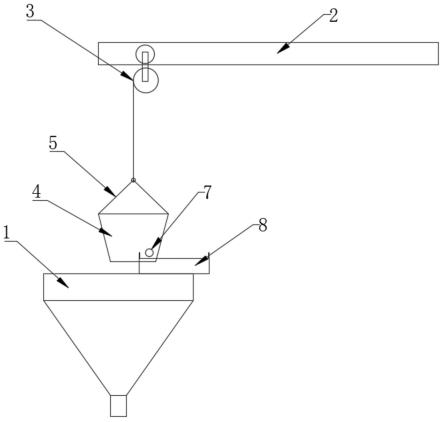
16.图3为一种自动翻斗式输送机的吊装流程示意图;
17.图4为一种自动翻斗式输送机中实施例二的主视示意图;
18.图5为一种自动翻斗式输送机中实施例二的左视示意图;
19.图6为图4中a部分的放大示意图。
20.图中:1、料仓;2、轨道梁;3、电动葫芦;4、盛料斗;5、吊臂;6、翻转轴;7、滚轮;8、导轨;9、限位盘;10、限位柱;11、导向柱;12、电机;13、传动带;14、转轴;15、斗盖;16、支撑板。
具体实施方式
21.实施例一
22.请参阅图1~3,本发明实施例中,一种自动翻斗式输送机,包括料仓1和轨道梁2,料仓1的上端的一侧安装有一组导轨8,轨道梁2的下端滑动连接有电动葫芦3,电动葫芦3的下端连接有吊臂5,吊臂5的下端固定连接有盛料斗4,吊臂5安装在盛料斗4的上口中部,从而在吊装的过程中可起到配重作用,盛料斗4的外侧的前后端均安装有翻转轴6,翻转轴6的外侧安装有滚轮7,电动葫芦3通过导线与外部的电控箱电性连接,通过电控箱可以对电动葫芦3发出运行或停止指令。
23.在图3中:盛料斗4的运动轨迹上对应设置有四个位置传感器,分别为位置传感器a、位置传感器b、位置传感器c和位置传感器d,盛料斗4在垂直吊装的过程中靠近下端时对应的为位置传感器a,盛料斗4在垂直吊装的过程中靠近上端时对应的为位置传感器b,盛料斗4在水平移动的过程中靠近翻转轴6的左侧时对应的为位置传感器c,盛料斗4沿着导轨8进行翻转的过程中靠近翻转轴6的下侧时对应的为位置传感器d,位置传感器a、位置传感器b、位置传感器c和位置传感器d也均与外部的电控箱电性连接,电动葫芦3 的运动动作与位置传感器a、位置传感器b、位置传感器c和位置传感器d通过电连接互锁,通过位置传感器a、位置传感器b、位置传感器c和位置传感器d对电动葫芦3的运动位置进行限定,使得盛料斗4在运动过程中,可以达到指定的位置进行实现装料和卸料,而不发生偏离,最大限度地减少盛料斗4的运动距离,去除不必要的动作,提高工作效率,降低电力能源损耗,在吊装的过程中,当电动葫芦3带动盛料斗4向上运动到设定位置时,位置传感器b发生自锁响应,电控箱发出指令,使得电动葫芦3停止上升的动作,可以有效地避免电动葫芦3的吊钩冲顶,造成电动葫芦3或盛料斗4损坏,同时即避免了盛料斗 4上升的高度过于导轨8的位置,在卸料时,还要继续向下运动过长的距离,造成工作效率下降,又避免盛料斗4上升的高度不够,在水
平运动时撞上导轨8,造成导轨8或盛料斗4损坏,位置传感器b自锁后,电动葫芦3在水平方向上沿着轨道梁2向左移动到设定位置时,位置传感器c发生自锁响应,电控箱发出指令,使得电动葫芦3停止水平移动的动作,保证滚轮7位于导轨8的上方靠近左侧的位置,保证了盛料斗4在接下来的下降过程中,滚轮7可以正好卡在导轨8上方的左侧,使得盛料斗4在倾斜卸料时,滚轮7可以沿着导轨8向右滚动,位置传感器c发生自锁后,电动葫芦3带动盛料斗4向下运动,滚轮7会自动卡在导轨8的上方靠近左侧的位置,盛料斗4继续向下运动时,盛料斗4发生倾斜,滚轮7沿着导轨8向右自由滚动,使得电动葫芦3的钢丝绳保持垂直状态,当盛料斗4倾斜到设定位置时,位置传感器d发生自锁响应,电控箱发出指令,使得电动葫芦3 停止下降和水平移动的动作,此时电动葫芦3的钢丝绳保持绷直状态,直到盛料斗4中的料完全卸完,同理,再进行反向操作,电动葫芦3带动盛料斗4下降到右侧设定位置后,位置传感器a发生自锁响应,电控箱发出指令,使得电动葫芦3停止下降的动作,使得电动葫芦3的钢丝绳始终保持绷直状态,避免了盛料斗4到达装料平台后,电动葫芦3继续下降,造成了电动葫芦3的钢丝绳发生脱槽事故,保证了吊装的安全性。
24.在图3中:两个滚轮7的位置与两个导轨8相对应,滚轮7与导轨8的结构相匹配,两个导轨8之间的中心距与两个滚轮7之间的中心距相等,从而使得盛料斗4下降到一端位置后,两个滚轮7正好卡在导轨8的上方,同时滚轮7还可以沿着导轨8平稳地滑动,两个滚轮7之间的间距大于盛料斗4的上口宽度,从而便于盛料斗4翻转卸料,翻转轴6 固定在盛料斗4的重心偏下部位,翻转轴6与盛料斗4通过加强筋固定连接,翻转轴6与滚轮7转动连接,当电动葫芦3向下运动,同时滚轮7沿着导轨8滚动时,可以使得盛料斗4在重力作用下,可以顺利向料仓1的内侧方向发生自动翻转,电动葫芦3和吊臂5处于相对垂直状态,从而当盛料斗4在重力作用自动翻转时,滚轮7在导轨8上自由滚动。
25.实施例二
26.请参阅图4~6,本发明实施例中,一种自动翻斗式输送机,包括料仓1和轨道梁2,料仓1的上端的一侧安装有一组导轨8,一组导轨8的外侧均固定连接有导向柱11,轨道梁2的下端滑动连接有电动葫芦3,电动葫芦3的下端连接有吊臂5,吊臂5的下端固定连接有盛料斗4,吊臂5安装在盛料斗4的上口中部,盛料斗4的外侧的前后端均安装有翻转轴6,盛料斗4的上端安装有一组斗盖15,盛料斗4的内侧的中部靠近一组斗盖15 的下端固定连接有支撑板16,盛料斗4与斗盖15的交接处的外侧均设置有转轴14,转轴 14的外侧安装有传动带13,传动带13的下端安装有电机12,电机12固定安装在盛料斗 4的外侧,两个斗盖15的内侧均位于支撑板16上,翻转轴6的外侧安装有滚轮7,滚轮7 的外侧设置有限位柱10,限位柱10的外侧固定连接有限位盘9,在吊装过程或装卸料过程,为了减少灰尘或有毒有害气体的挥发,可以通过斗盖15对盛料斗4进行封盖,通过电机12带动传动带13转动,传动带13带动转轴14转动,转轴14连同斗盖15一起向外侧翻转,便可以打开盛料斗4,这时便可以装料或卸料,在卸料的过程中,可以控制斗盖 15的开启度,从而可以控制出料速度。
27.在图5中:两个滚轮7的位置与两个导轨8相对应,两个导轨8之间的中心距与两个滚轮7之间的中心距相等,两个限位柱10的位置与两个导向柱11相对应,两个限位柱10 之间的中心距与两个导向柱11之间的中心距相等,当电动葫芦3带动盛料斗4上升时,电动葫芦3的钢丝绳与吊臂5的交接处可能会发生转动,盛料斗4到达料仓1上方后,盛料斗4并不会正对着料仓1,即盛料斗4在垂直方向上发生了转动,如果盛料斗4直接下降后,滚轮7无法落
入到导轨8上,因此,电动葫芦3沿着轨道梁2水平向左移动,如果盛料斗4与料仓1在垂直方向上发生了转动,其中一个限位柱10先到达导向柱11处,当电动葫芦3继续水平向左移动时,盛料斗4以一个限位柱10为基点进行转动,使得另一个限位柱10也向相对应的导向柱11靠近,并最终抵达相对应的导向柱11处,这时,盛料斗4与料仓1在垂直方向上并保持了平齐,滚轮7便正好与两个导轨8相对应,当盛料斗4下降后,便可以使得滚轮7轻松地落入到导轨8上,这时继续下降盛料斗4便可以实现翻转卸料了,方便快捷,可以实现快速卸料。
28.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。