技术特征:
1.一种用于促进机器人操作的基于处理器的系统的操作的方法,所述方法包括:针对多个候选传感器姿态中的每个候选传感器姿态,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效果的遮挡评估;以及至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态。2.根据权利要求1所述的方法,其中,传感器是相机,所述相机具有针对候选传感器姿态中的每个候选传感器姿态的操作环境的相应视场,并且至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态包括:至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一相机的姿态。3.根据权利要求1所述的方法,其中,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效果的遮挡评估包括:针对来自由所述第一机器人能实现的姿态的c空间路线图的多个机器人姿态中的每个机器人姿态执行遮挡评估。4.根据权利要求1所述的方法,其中,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效果的遮挡评估包括:至少部分地基于将由所述第一机器人执行的任务,针对选自由所述第一机器人能实现的姿态的c空间路线图的多个机器人姿态中的每个机器人姿态执行遮挡评估。5.根据权利要求1所述的方法,其中,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效果的遮挡评估包括:针对从由所述第一机器人能实现的姿态的路线图采样的多个机器人姿态中的每个机器人姿态执行遮挡评估,呈图形形式的路线图包括表示机器人的c空间中的各机器人姿态的节点集合和耦合节点对的多个边,并且所述多个边表示由相应边耦合的节点表示的相应机器人姿态之间的转变。6.根据权利要求1所述的方法,其中,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效果的遮挡评估包括:执行针对在所述第一机器人和操作环境中的至少第二机器人通过所述第一机器人和所述第二机器人的相应多个机器人姿态中的每个机器人姿态移动时所述第一机器人和所述第二机器人的遮挡效果的遮挡评估。7.根据权利要求6所述的方法,其中,执行针对在所述第一机器人和操作环境中的至少第二机器人通过所述第一机器人和所述第二机器人的相应多个机器人姿态中的每个机器人姿态移动时所述第一机器人和所述第二机器人的遮挡效果的遮挡评估包括:基于表示所述第一机器人的多个机器人姿态和所述第二机器人的多个机器人姿态的机器人姿态集合执行遮挡评估。8.根据权利要求1所述的方法,还包括:针对候选传感器姿态中的每个候选传感器姿态,确定候选传感器姿态的相应成本值,所述相应成本值表示遮挡。
9.根据权利要求1所述的方法,还包括:在针对工作空间中的每个体素执行的外部迭代循环中,确定所述工作空间中的其他体素中的每个体素的相应遮挡值,其中,遮挡值表示所述外部迭代循环的当前迭代的体素是否被对象相对于一个或更多个传感器遮挡,所述对象被定位成至少部分地占据正在被确定遮挡值的相应体素;以及聚合候选传感器姿态的成本。10.根据权利要求9所述的方法,还包括:在确定体素的相应遮挡值之前,针对每个候选传感器姿态,初始化候选传感器姿态的相应成本值;在所述外部迭代循环中,针对所述工作空间中的所有体素,初始化体素的相应遮挡值。11.根据权利要求9所述的方法,其中,确定所述外部迭代循环的当前迭代的体素的相应遮挡值包括:在内部迭代循环中,基于已经被定位的任何传感器确定所述外部迭代循环的当前迭代的体素是否被遮挡;在所述内部迭代循环中,如果所述外部迭代循环的当前迭代的体素被遮挡,则使呈机器人姿态之一的机器人形式的对象占据的任何体素的相应遮挡值增加,其中,所述对象在相应机器人姿态下遮挡所述外部迭代循环的当前迭代的体素。12.根据权利要求9所述的方法,其中,聚合候选传感器姿态的成本包括:针对每个候选传感器姿态,对传感器与体素遮挡正在被评估的外部迭代循环的当前迭代的体素之间的每个体素的遮挡值求总和;以及将总和添加到相应候选传感器姿态的累积成本总和中。13.根据权利要求1至12中任一项所述的方法,其中,至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态包括:相对于候选传感器姿态中的其他候选传感器姿态的相关联成本基于该候选传感器姿态的相关联成本来选择该候选传感器姿态。14.根据权利要求1至12中任一项所述的方法,其中,至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态包括:选择相对于候选传感器姿态中的其他候选传感器姿态的相关联成本具有候选传感器姿态的最低相关联成本的候选传感器姿态。15.根据权利要求1所述的方法,还包括:在至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态之后,针对多个候选传感器姿态中的每个候选传感器姿态,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时至少所述第一机器人的遮挡效果的遮挡评估;以及至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第二传感器的姿态。16.根据权利要求15所述的方法,其中,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效
果的遮挡评估包括:执行还针对所述第一传感器按照由候选传感器姿态中的针对所述第一传感器所选择的一个候选传感器姿态所指定的被定位和定向的遮挡评估。17.根据权利要求15所述的方法,其中,传感器是相机,并且所述方法还包括:接收由相机中的处于与针对所述第一传感器所选择的传感器姿态对应的第一姿态的第一相机以及从相机中的处于与针对所述第二传感器所选择的传感器姿态对应的第二姿态的第二相机收集的传感器信息;以及基于所接收的传感器信息针对至少所述第一机器人执行运动规划。18.根据权利要求15所述的方法,还包括:在至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第二传感器的姿态之后,重复以下直到达到终止条件:针对多个候选传感器姿态中的每个候选传感器姿态,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时至少所述第一机器人的遮挡效果的遮挡评估;以及至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定附加传感器的姿态。19.一种用于促进机器人操作的基于处理器的系统的操作的系统,所述系统包括:至少一个处理器;至少一个处理器可读介质,其通信地耦合到所述至少一个处理器并且存储处理器可执行指令,所述处理器可执行指令在由所述至少一个处理器执行时使所述至少一个处理器:针对多个候选传感器姿态中的每个候选传感器姿态,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效果的遮挡评估;以及至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态。20.根据权利要求19所述的系统,其中,传感器是相机,所述相机具有针对候选传感器姿态中的每个候选传感器姿态的操作环境的相应视场。21.根据权利要求19所述的系统,其中,为了执行遮挡评估,指令在被执行时使所述至少一个处理器针对来自由所述第一机器人能实现的姿态的c空间路线图的多个机器人姿态中的每个机器人姿态执行遮挡评估。22.根据权利要求19所述的系统,其中,为了执行遮挡评估,指令在被执行时使所述至少一个处理器至少部分地基于将由所述第一机器人执行的任务,针对选自由所述第一机器人能实现的姿态的c空间路线图的多个机器人姿态中的每个机器人姿态执行遮挡评估。23.根据权利要求19所述的系统,其中,为了执行遮挡评估,指令在被执行时使所述至少一个处理器针对从由所述第一机器人能实现的姿态的路线图采样的多个机器人姿态中的每个机器人姿态执行遮挡评估,呈图形形式的路线图包括表示机器人的c空间中的各机器人姿态的节点集合和耦合节点对的多个边,并且所述多个边表示由相应边耦合的节点表示的相应机器人姿态之间的转变。24.根据权利要求19所述的系统,其中,为了执行遮挡评估,指令在被执行时使所述至少一个处理器执行针对在所述第一机器人和操作环境中的至少第二机器人通过所述第一
机器人和所述第二机器人的相应多个机器人姿态中的每个机器人姿态移动时所述第一机器人和所述第二机器人的遮挡效果的遮挡评估。25.根据权利要求24所述的系统,其中,为了执行遮挡评估,指令在被执行时使所述至少一个处理器基于表示所述第一机器人的多个机器人姿态和所述第二机器人的多个机器人姿态的机器人姿态集合执行遮挡评估。26.根据权利要求19所述的系统,其中,处理器可执行指令当被执行时,使所述至少一个处理器还:针对候选传感器姿态中的每个候选传感器姿态,确定候选传感器姿态的相应成本值,所述相应成本值表示遮挡。27.根据权利要求19所述的系统,其特征在于,处理器可执行指令当被执行时,使所述至少一个处理器还:在针对工作空间中的每个体素执行的外部迭代循环中,确定所述工作空间中的至少其他体素的相应遮挡值,其中,遮挡值表示所述外部迭代循环的当前迭代的体素是否被对象相对于一个或更多个传感器遮挡,所述对象被定位成至少部分地占据正在被确定遮挡值的相应体素;以及聚合候选传感器姿态的成本。28.根据权利要求27所述的系统,其中,处理器可执行指令当被执行时,使所述至少一个处理器还:在确定体素的相应遮挡值之前,针对每个候选传感器姿态,初始化候选传感器姿态的相应成本值;在所述外部迭代循环中,针对所述工作空间中的所有体素,初始化体素的相应遮挡值。29.根据权利要求28所述的系统,其中,为了确定所述外部迭代循环的当前迭代的体素的相应遮挡值,处理器可执行指令当被执行时,使所述至少一个处理器:在内部迭代循环中,基于已经被定位的任何传感器确定所述外部迭代循环的当前迭代的体素是否被遮挡;在所述内部迭代循环中,如果所述外部迭代循环的当前迭代的体素被遮挡,则使呈机器人姿态之一的机器人形式的对象占据的任何体素的相应遮挡值增加,其中,所述对象在相应机器人姿态下遮挡所述外部迭代循环的当前迭代的体素。30.根据权利要求27所述的系统,其中,为了聚合候选传感器姿态的成本,处理器可执行指令当被执行时,使所述至少一个处理器:针对每个候选传感器姿态,对传感器与在所述外部迭代循环的当前迭代中遮挡正在被评估的所述外部迭代循环的当前迭代的体素之间的每个体素的遮挡值求总和;以及将总和添加到相应候选传感器姿态的累积成本总和中。31.根据权利要求19至30中任一项所述的系统,其中,为了至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态,处理器可执行指令当被执行时,使所述至少一个处理器:相对于候选传感器姿态中的其他候选传感器姿态的相关联成本基于该候选传感器姿态的相关联成本来选择该候选传感器姿态。32.根据权利要求19至30中任一项所述的系统,其中,为了至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态,处理器可执
行指令当被执行时,使所述至少一个处理器还:选择相对于候选传感器姿态中的其他候选传感器姿态的相关联成本具有候选传感器姿态的最低相关联成本的候选传感器姿态。33.根据权利要求19所述的系统,其中,处理器可执行指令当被执行时,使所述至少一个处理器还:在至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第一传感器的姿态之后,针对多个候选传感器姿态中的每个候选传感器姿态,执行针对在操作环境中的至少第一机器人通过所述第一机器人的多个机器人姿态中的每个机器人姿态移动时所述第一机器人的遮挡效果的遮挡评估;以及至少部分地基于对遮挡的评估来选择候选传感器姿态中的一个候选传感器姿态以确定第二传感器的姿态。34.根据权利要求33所述的系统,其中,为了执行遮挡评估,处理器可执行指令当被执行时,使所述至少一个处理器还:执行还针对所述第一传感器按照由候选传感器姿态中的针对所述第一传感器所选择的一个候选传感器姿态所指定的被定位和定向的遮挡评估。35.根据权利要求33所述的系统,其中,传感器是相机,并且其中,处理器可执行指令当被执行时,使所述至少一个处理器还:接收由相机中的处于与针对所述第一传感器所选择的传感器姿态对应的第一姿态的第一相机以及从相机中的处于与针对所述第二传感器所选择的传感器姿态对应的第二姿态的第二相机收集的传感器信息;以及基于所接收的传感器信息针对至少所述第一机器人执行运动规划。
技术总结
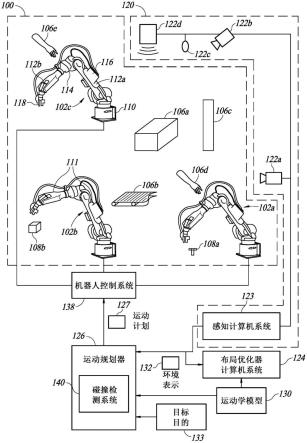
优化机器人操作环境的布局以至少减少或最小化一个或更多个传感器的遮挡,以改进运动规划的计算效率,和/或改进所生成的运动计划的效率和/或稳健性。可以确定一个或更多个传感器的相应传感器姿态(即,定位和定向),同时考虑机器人的各种机器人姿态与机器人姿态之间的转变。例如,可以确定表示遮挡的成本值,并且基于成本值或聚合成本评估候选传感器姿态。在执行之前可能不知道要采用的传感器的总数,并且实际上可能只有在若干次迭代之后,在达到终止条件(例如,任务完成时间)时才能确定要采用的传感器的总数。传感器可以采用各种形式,例如,数码相机、雷达、LIDAR、声呐、被动红外(PIR)运动检测器。(PIR)运动检测器。(PIR)运动检测器。
技术研发人员:詹尼
受保护的技术使用者:实时机器人有限公司
技术研发日:2021.04.12
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。