1.本发明涉及图像识别技术领域,具体涉及一种智能区域识别报警方法及系统。
背景技术:
2.在某些特定区域,如防盗区域、安全区域、医院防辐射区域、吸烟区域、生产高压等区域,目标人和物体进入或离开该指定区域时通常会进行相应报警以提醒人员注意该区域的一些事项。现有技术中主要采用相应的传感器来识别目标的移动方向,并根据识别的移动方向发出不同的报警提醒,通过上述方法需要增设额外的硬件,提高了成本。
3.随着科技的发展和人们需求的增长,视频监控技术得到了飞速的发展。视频监控技术在银行、小区、机场、车站等许多场所都有着非常广泛的应用。但目前的监控摄像头主要对该区域内的视频图像数据进行记录,便于后续的查看和取证。因此,如何在现有监控摄像头的基础上,不增设其他硬件,实现对监控的特定区域内目标移动方向的识别,并发出相应的报警提醒,成为目前图像识别技术中亟待解决的问题。
技术实现要素:
4.本发明意在提供一种智能区域识别报警方法,基于图像识别技术,通过计算参考线与目标轨迹线的夹角判断目标移动方向,并进行报警提示。能够准确识别目标的移动方向且无需增设额外硬件。
5.本发明提供的技术方案为:一种智能区域识别报警方法,包括:
6.s1:在检测区域设置参考线;
7.s2:获取目标第一次进入检测区域的位置为第一坐标;
8.s3:获取目标越过参考线的位置为第二坐标;
9.s4:所述第一坐标和第二坐标的连线为轨迹线,根据参考线和轨迹线的夹角设置报警度数;
10.s5:计算参考线和轨迹线的实时夹角度数,当夹角度数大于报警度数则进行报警提示。
11.本发明的工作原理及优点在于:本发明方法首先在检测区域设置参考线,并以参考线的法线方向作为后续判断的参考方向,然后分别获取目标第一次进入检测区域的位置作为第一坐标,目标越过参考线的位置为第二坐标。将第一坐标和第二坐标的位置进行连线,作为轨迹线,根据轨迹线和参考线的夹角预先设置报警度数,当夹角度数大于报警度数时,说明目标人或物体的移动方向与参考方向基本符合。因此计算参考线和轨迹线的实时夹角度数,当夹角度数大于报警度数则进行报警提示。本发明方法基于图像识别技术,通过计算参考线与目标轨迹线的夹角判断目标移动方向,并进行报警提示。能够准确识别目标的移动方向且无需增设额外硬件。
12.进一步,所述s1中检测区域为摄像头垂直从上至下正对出入口的画面。
13.通过调整摄像头角度,使摄像头垂直从上至下正对房间出入口的影像画面作为检
测区域,能够减少因视觉角度倾斜带来图像识别的误差,提高了方向识别的准确率。
14.进一步,所述s1中参考线为检测区域的二等分线。
15.参考线为检测区域的水平二等分线,通过二等分检测区域便于进行后续的角度计算,能够同时兼顾精度和准确度。
16.进一步,所述s1中检测区域的对角线端点分别为(0,0)和(44,36),所述参考线的端点分别为(0,18)和(44,18)。
17.为方便计算,将检测区域均分为x轴为44个单位,y轴为36个单位的矩形区域,该检测区域的对角线端点分别为(0,0)和(44,36),其参考线的端点分别为(0,18)和(44,18)。将检测区域划分为44*36个单位的区域兼顾了精度和运算量。
18.进一步,所述s3为:实时获取目标位置坐标,将目标越过参考线的位置作为第二坐标;所述s3中目标位置坐标获取间隔为0.3秒,循环15次。
19.获取第二坐标的过程中,当目标进入监控范围内就会每0.3秒获取移动位置,用来判断目标是否在移动,每0.3秒获取坐标位置,循环15次(也就是4.5秒),如果4.5秒内位置没有明显变化,那么系统认为是不在报警条件内。通过上述过程能够在较短的时间内快速识别出目标的移动方向。
20.进一步,所述s2中的第一坐标和所述s3中的第二坐标为根据目标所占方形框的两对角坐标计算的中心点坐标。
21.以目标人或物体在检测区域内的中心坐标作为代表该目标的中部,根据目标所占方形框的两对角坐标计算的中心点坐标作为角度的计算的位置坐标,能够保证轨迹线角度计算的准确率。
22.进一步,所述s4包括:
23.s4-1:所述第一坐标和第二坐标的连线为轨迹线,根据参考线和轨迹线的夹角设置报警度数;
24.s4-2:根据轨迹线的斜率分别判断目标的进出方向,根据进出方向分别确定轨迹线对应的角度范围;
25.所述s5为:计算参考线和轨迹线的实时夹角度数,当夹角度数大于报警度数则报警,并确定目标的进出方向。
26.在识别目标移动方向的基础上,根据轨迹线的斜率进行更精确的计算,进一步识别目标相对于检测区域的进出方向,使得本发明方法具备更全面的方向识别功能。
27.进一步,所述s5中根据目标的进出方向设置不同的报警提示。
28.根据进一步识别的进出方向设置不同的报警提示,以提醒人员在不同的移动路线中注意相应的事项,具有更加智能化和人性化的特点。
29.进一步,所述报警提示的设置包括提示语音、生效时间和重复日期。
30.报警提示的设置项目包括提示语音、生效时间和重复日期。提示语音可以自定义铃声,还可以录制其他语音作为不同进出方向的提示语音。生效时间指系统进行报警提示的时间段,在自定义时间段以外的时间,系统不会报警提示。重复日期指设置一周内报警提示生效的具体哪几天。通过以上功能的设置,使报警提示更人性化且符合实际使用场景。
31.本发明还提供一种智能区域识别报警系统,该系统采用了上述智能区域识别报警方法。
附图说明
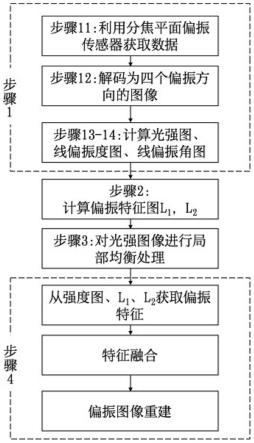
32.图1为本发明实施例的一种智能区域识别报警方法的逻辑框图;
33.图2为本发明实施例的一种智能区域识别报警方法的识别示意图。
具体实施方式
34.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
35.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
36.下面通过具体实施方式进一步详细的说明:
37.说明书附图中的标记包括:第一坐标1、第二坐标2、轨迹线3、参考线4、夹角5、检测区域6。
38.实施例:
39.如图1所示,本实施例公开了一种智能区域识别报警方法及系统,具体包括以下步骤(本方案中对各步骤的编号仅做步骤区分作用,不限制各步骤的具体执行顺序,且各步骤还可同时进行):
40.s1:在检测区域6设置参考线4。如图2所示,本实施例中通过调整摄像头角度,使摄像头垂直从上至下正对房间出入口的影像画面作为检测区域6。检测区域6为一个大矩形框,为方便计算,将矩形框的左下角作为坐标原点,矩形框的长(x轴)为44个单位,矩形框的宽(y轴)为36个单位,该检测区域6的对角线端点分别为(0,0)和(44,36)。在检测区域6内设置参考线4,参考线4用于辅助目标进行方向的判断,其中参考线4的法线方向为参考方向。实施中参考线4为检测区域6的水平二等分线,通过二等分检测区域6便于进行后续的角度计算,能够同时兼顾精度和准确度,其参考线4的两个端点分别为(0,18)和(44,18)。
41.s2:获取目标第一次进入检测区域6的位置为第一坐标1。实时监控检测区域6,获取目标人或物体第一次进入检测区域6的位置,作为第一坐标1。其中,第一坐标1为目标人或物体在检测区域6的大矩形框内所占的方形框的两对角坐标之间的中心点坐标。
42.s3:获取目标越过参考线4的位置为第二坐标2。在检测区域6平面内,获取第一坐标1后,每次间隔0.3秒共循环15次,实时获取目标位置坐标,在目标越过参考线4时,将其位置作为第二坐标2。其中,第二坐标2同样为目标人或物体在检测区域6的大矩形框内所占的方形框的两对角坐标之间的中心点坐标。获取第二坐标的过程中,当目标进入监控范围内就会每0.3秒获取移动位置,用来判断目标是否在移动,每0.3秒获取坐标位置,循环15次(也就是4.5秒),如果4.5秒内位置没有明显变化,那么系统认为是不在报警条件内,能够在较短的时间内快速识别出目标的移动方向。
43.s4-1:所述第一坐标1和第二坐标2的连线为轨迹线3,根据参考线4和轨迹线3的夹角5设置报警度数。通过参考线4和轨迹线3的夹角5对目标进行方向判断,当夹角5大于一定度数后,说明目标移动方向符合参考方向,此时就会进行相应报警提示。本实施例中设置报警度数为15度,即参考线4与轨迹线3的夹角5大于15度,判断目标移动方向与参考方向基本符合,会进行报警提示。本实施例中,当目标经过参考线4的时候有可能是平移并没有经过
参考线4,没有经过参考线4系统则不会报警,由于系统报警存在一定的误差,经过测试调整目标穿越参考线4超过15度的时候就报警。
44.s4-2:根据轨迹线3的斜率分别判断目标的进出方向,根据进出方向分别确定轨迹线3对应的角度范围。在检测区域6内,根据目标的轨迹线3的斜率能够判断目标的进出方向,确定目标的进出方向后,后续能够提供更针对性的报警提示。在检测区域6内根据进出方向分别确定轨迹线3对应的角度范围,作为后续确定进出方向的判断依据,轨迹线3的斜率对应角度的计算过程如下:
45.设第一坐标1和第二坐标2分别为:
46.(starx,stary),(endx,endy)
47.根据第一坐标1和第二坐标2及计算轨迹线的斜率:
48.float centerx=(startx endx)/2;
49.float distancex=startx-centerx;
50.float distance=(float)math.sqrt(math.pow((startx-endx),2) math.pow((starty-endy),2))/2;
51.默认进入方向向上,通过默认方向计算出斜率对应角度:
52.float angle=(float)(math.acos(distancex/distance)/(2*math.pi)*360);
53.本实施例中参考线4为水平设置,默认参考线4的法线方向向上为进入方向,反之为出去方向,最终确定轨迹线3的斜率对应角度范围在大于-45度小于90度内则为出去方向,否则为进入方向。
54.s5:计算参考线4和轨迹线3的实时夹角5度数,当夹角5度数大于报警度数则报警,并确定目标的进出方向。参考线4与轨迹线3的夹角5大于15度,判断目标移动方向与参考方向基本符合,此时系统会进行报警提示,同时计算当前轨迹线3的斜率对应角度,根据上一步确定的角度范围,判断目标人或物体的进出方向属于进入方向或出去方向。以上内容的计算过程如下:
55.设参考线4第一端点的x轴坐标和y轴坐标分别为:
56.line1start.getx(),line1start.gety()
57.设参考线4第二端点的x轴坐标和y轴坐标分别为:
58.line1end.getx(),line1end.gety()
59.进而得到参考线4两端的端点坐标:
60.(line1start.getx(),line1start.gety())和(line1end.getx(),line1end.gety())
61.目标人或物体进入检测区域6,分别获取轨迹线3第一坐标的x轴坐标和y轴坐标:
62.line2start.getx(),line2start.gety()
63.分别获取轨迹线3第二坐标的x轴坐标和y轴坐标:
64.line2end.getx(),line2end.gety()
65.进而得到轨迹线3两端的端点坐标:
66.(line2start.getx(),line2start.gety())(line2end.getx(),line2end.gety())
67.分别计算参考线4和轨迹线3的中心坐标:
68.double dx1=line1end.getx()-line1start.getx();
69.double dy1=line1end.gety()-line1start.gety();
70.double dx2=line2end.getx()-line2start.getx();
71.double dy2=line2end.gety()-line2start.gety();
72.double angle1=math.atan2(dy1,dx1);
73.int angle1int=(int)(angle1*180/math.pi);
74.double angle2=math.atan2(dy2,dx2);
75.int angle2int=(int)(angle2*180/math.pi);
76.判断两条线的中心坐标是否在同一平面上:
77.if(angle1*angle2》=0){
78.计算两条线的夹角5的绝对值,再计算出最小夹角5:
[0079][0080][0081]
计算出的夹角5度数大于报警度数,并通过计算轨迹线3的斜率对应角度确定目标的进出方向。
[0082]
本实施例中还根据目标的进出方向发出不同的报警提示,报警提示需要预先设置,预设的项目包括提示语音、生效时间和重复日期。提示语音可以自定义铃声,如目标为进入方向则提示语音为“欢迎光临”,目标为出去方向则提示语音为“请小心台阶”,还可以录制其他语音作为不同进出方向的提示语音。生效时间指系统进行报警提示的时间段,在自定义时间段以外的时间,系统不会报警提示。重复日期指设置一周内报警提示生效的具
体哪几天。通过以上功能的设置,使报警提示更人性化且符合实际使用场景。
[0083]
本实施例还公开了一种智能区域识别报警系统,该系统采用了上述智能区域识别报警方法。
[0084]
以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术得出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。