一种多节点vr数据手套处理系统
技术领域
1.本发明涉及vr数据手套技术领域,尤其是指一种多节点vr数据手套处理系统。
背景技术:
2.数据手套是指通过在手套内置传感器,采集手部运动数据的硬件设备,通常用于模拟仿真、虚拟现实(vr)交互、动画制作等领域。现在市面上主流的数据手套从传感器技术角度主要分为惯性、光纤以及光学三大类。
3.惯性传感器为传感器的一种,主要是检测和测量加速度、倾斜、冲击、振动、旋转和多自由度 (dof)运动,是解决导航、定向和运动载体控制的重要部件。
4.目前动作捕捉系统有惯性式和光学式两大主流技术路线,而现有数据手套的缺陷在于惯性式动作捕捉系统采集到的信号量,需要足够多的信号量才能实现实时姿态跟踪任务,解算得到的姿态信息范围小且灵敏度较低;对捕捉环境适应性较差,容易受光照和背景等外界环境干扰,为此,本发明人提出了一种多节点vr数据手套处理系统,以解决上述提出的技术问题。
技术实现要素:
5.发明为克服上述情况不足,旨在提供一种能解决上述问题的技术方案。
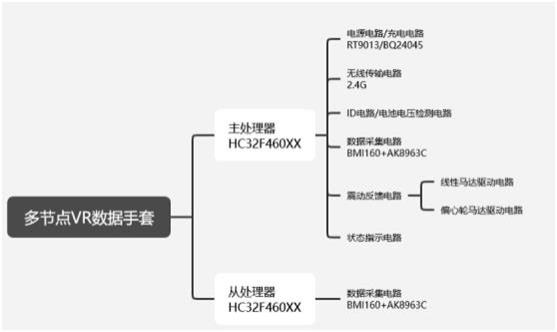
6.一种多节点vr数据手套处理系统,包括主处理器,无线传输电路、工作状态指示电路、电源电路/充电电路、从处理器,所述主处理器电性连接有id电路/电池电压检测电路、震动反馈电路和状态指示电路,主处理器和从处理器均电性连接有数据采集电路,无线传输电路主要是将采集到的数据通过2.4g无线传输至电脑端进行手指的姿态算法解析,数据传输电路采用蓝牙模块u1采用的是飞易通的fst909,与电脑端进行数据透传,最大传输速度可至2mps,蓝牙模块的发射功率为 18dbm,在空旷地方最大传输距离可到100m,蓝牙模块与主控部分的数据连接采用串口连接,且蓝牙模块端做了连接信号反馈。
7.进一步的,所述震动反馈电路电性连接有线性马达驱动电路和偏心轮马达驱动电路。
8.进一步的,所述主处理器分别与电源电路/充电电、无线传输电路进行电性连接。
9.进一步的,所述充电电路为锂电池充电电路构成,电源电路/充电电路采用3.7v的高容量锂电池,极大提升使用续航时间,电源电路主要是3.7v锂电池通过u5的rt9013芯片将3.7v稳压至3.3v,其中rt9013具备过热保护以及过流保护,在电源输入处,进行了快恢复保险丝(ptc1.1a_6v)f1保证电路的短路保护,在电源输入,j1采用常用的typec数据口进行充电,锂电池充电电路u3采用ti的bq24045进行锂电池充电管理,此ic具备电池在线检测,可编程充电电流,以及充电状态指示等功能。
10.进一步的,所述主处理器采用mcu半导体,半导体型号为hc32f460,主处理器的型号为u2,主处理器的工作不仅作为据整合的同时,还负责大拇指、食指4个传感器数据的采集,以及震动反馈状态的输出,双处理器的架构能够极大的提升传感器数据刷新率,从传统
的400hz提升至1000hz,内部刷新率的提升会使手指姿态更加准确,稳定。
11.进一步的,所述工作状态指示电路电性连接有led指示灯,led指示灯包括d1、d2和d3,d1、d2和d3均为双色红蓝led,led指示灯发出亮光指示数据传输是否正常、蓝牙的连接状态等工作状态以及锂电池的充电状态,蓝牙模块端做了连接信号反馈可通过led指示灯d1、d2和d3指示连接状态。
12.进一步的,所述从处理器的型号为u6,采用mcu半导体,半导体型号为hc32f460,型号为hc32f460的半导体负责小拇指,无名指、中指、手背等四个传感器的数据采集。
13.与现有技术相比,本发明的有益效果是:1、通过采用无线蓝牙将数据手套及电脑端进行通信,传输距离在空旷距离可到50m;2、在大拇指以及食指布置了2个传感器,会使手指姿态更加细腻,以及捕捉姿态更加稳定;3、震动反馈系统包含线性震动马达以及偏心轮震动马达,两种马达的震感结合会让虚拟现实交互反馈更加显示;4、数据处理单元采用双处理器的架构,极大的提升了数据的处理速度,从市面上常规的400hz的数据刷新率提升至800-1000hz的刷新速度,内部刷新率的提升会使手指姿态更加准确,稳定;5.本发明的一种惯性vr数据手套的手指部分跟手背部分采用特制线材进行数据通信,根据测试,手指传感器线材的弯曲次数可达300万次以上,可支持正常使用3年以上,线材无损坏;6、本发明的一种惯性vr数据手套的供电部分采用3.7v锂电池供电,在硬件电路新增了电池防反接以及短路保护功能,极大的增加了设备的安全性;7、本发明的一种惯性vr数据手套的穿戴部分采用布料手套,穿戴快捷方便;8、本发明的技术优势在于惯性式动作捕捉系统采集到的信号量少,便于实时完成姿态跟踪任务,解算得到的姿态信息范围大、灵敏度高、动态性能好;对捕捉环境适应性高,不受光照、背景等外界环境干扰,并且克服了光学动捕系统摄像机监测区域受限的缺点;克服了vr设备常有的遮挡问题,其次是使用便捷的优势,使用方便,设备小巧轻便,便于佩戴。
附图说明
14.图1为所述实施例中数据采集电路原理图;图2为所述实施例中主处理器电路与id电路的连接电路图;图3为所述实施例中电源电路/充电电路的电路图;图4为所述实施例中震动反馈的线性马达驱动电路以及偏心轮马达驱动电路的电路图;图5为所述实施例中工作状态显示电路图;图6为所述实施例中无线传输电路图;图7为所述实施例中从处理器电路图;图8为一种多节点vr数据手套处理系统的系统示意图。
具体实施方式
15.下面结合附图与具体实施方式对本发明作进一步详细描述。
16.本实施例,请参阅图1-图8,其具体实施的一种多节点vr数据手套处理系统,包括主处理器,无线传输电路、工作状态指示电路、电源电路/充电电路、从处理器,所述主处理器电性连接有id电路/电池电压检测电路、震动反馈电路和状态指示电路,主处理器和从处理器均电性连接有数据采集电路,无线传输电路主要是将采集到的数据通过2.4g无线传输至电脑端进行手指的姿态算法解析,数据传输电路采用蓝牙模块u1采用的是飞易通的fst909,与电脑端进行数据透传,最大传输速度可至2mps,蓝牙模块的发射功率为 18dbm,在空旷地方最大传输距离可到100m,蓝牙模块与主控部分的数据连接采用串口连接,且蓝牙模块端做了连接信号反馈。
17.所述震动反馈电路电性连接有线性马达驱动电路和偏心轮马达驱动电路;主处理器分别与电源电路/充电电、无线传输电路进行电性连接。
18.所述充电电路为锂电池充电电路构成,电源电路/充电电路采用3.7v的高容量锂电池,极大提升使用续航时间,电源电路主要是3.7v锂电池通过u5的rt9013芯片将3.7v稳压至3.3v,其中rt9013具备过热保护以及过流保护,在电源输入处,进行了快恢复保险丝(ptc1.1a_6v)f1保证电路的短路保护,在电源输入,j1采用常用的typec数据口进行充电,锂电池充电电路u3采用ti的bq24045进行锂电池充电管理,此ic具备电池在线检测,可编程充电电流,以及充电状态指示等功能。
19.所述主处理器采用mcu半导体,半导体型号为hc32f460,主处理器的型号为u2,主处理器的工作不仅作为据整合的同时,还负责大拇指、食指4个传感器数据的采集,以及震动反馈状态的输出,双处理器的架构能够极大的提升传感器数据刷新率,从传统的400hz提升至1000hz,内部刷新率的提升会使手指姿态更加准确,稳定。
20.所述工作状态指示电路电性连接有led指示灯,led指示灯包括d1、d2和d3,d1、d2和d3均为双色红蓝led,led指示灯发出亮光指示数据传输是否正常、蓝牙的连接状态等工作状态以及锂电池的充电状态,蓝牙模块端做了连接信号反馈可通过led指示灯d1、d2和d3指示连接状态。
21.所述从处理器的型号为u6,采用mcu半导体,半导体型号为hc32f460,型号为hc32f460的半导体负责小拇指,无名指、中指、手背等四个传感器的数据采集。
22.目前动作捕捉系统有惯性式和光学式两大主流技术路线,惯性式虽然后于光学式出现,但以其超低廉成本和简便成熟的处理流程,以及完全实时的数据计算和回传机制,成为了更加炙手可热的技术。该发明主要针对手部动作的惯性动作数据采集,以及姿态的融合,从而实现vr手套数据交互。本发明的技术优势在于惯性式动作捕捉系统采集到的信号量少,便于实时完成姿态跟踪任务,解算得到的姿态信息范围大、灵敏度高、动态性能好;对捕捉环境适应性高,不受光照、背景等外界环境干扰,并且克服了光学动捕系统摄像机监测区域受限的缺点;克服了vr设备常有的遮挡问题。其次是使用便捷的优势,使用方便,设备小巧轻便,便于佩戴。
23.本发明区别于市面上的惯性动作捕捉手套,本发明公布了一种基于惯性传感器的多节点vr数据手套处理系统,包括包装在手套每个手指上的数据采集电路、数据采集电路、无线传输电路、电源电路和电池充电电路、震感反馈电路、开关电路、运行状态指示电路。
24.数据采集电路主要采集手指的7个关键骨骼节点数据以及手背的传感器数据。其中手指的7个传感器分布于每个手指的第二关节处,其中大拇指以及食指多一个传感器,分别置于大拇指的第一关节,食指的第一关节。手指惯性传感器能够实时的检测手指的运动轨迹,手背惯性传感器则检测整个手部动作的翻转状态。数据采集电路主要包括7个手指和手背等8个节点的加速度,陀螺仪,磁力计这9轴数据的采集。数据采集电路采用的姿态传感器u1为博世的bmi160芯片。该芯片的加速度量程高至
±
16g,陀螺仪量程为
±
2000dps,数据采集电路采用的姿态传感器u2采用akm的ak8963c,磁力计量程为
±
4800
µ
t,内置dmp标准的spi数据接口本发明公开了一种vr数据交互手套的硬件实现方案。该方案通过惯性数据加速度,陀螺仪以及加速度等传感器采集5个手指以及手背的9轴数据,并通过算法进行姿态融合实现vr交互。加速计是用来检测传感器受到的加速度的大小和方向的,它通过测量组件在某个轴向的受力情况来得到结果,表现形式为轴向的加速度大小和方向(xyz),但用来测量设备相对于地面的摆放姿势,则精确度不高,该缺陷可以通过陀螺仪得到补偿。
25.陀螺仪的工作原理是通过测量三维坐标系内陀螺转子的垂直轴与设备之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。它的强项在于测量设备自身的旋转运动,但不能确定设备的方位。而又刚好磁力计可以弥补这一缺陷,它的强项在于定位设备的方位,可以测量出当前设备与东南西北四个方向上的夹角。
26.在该系统中,陀螺仪传感器用于处理旋转运动,加速计用来处理直线运动,磁力计用来处理方向。陀螺仪知道“是否进行转动”,加速计知道“运动多长距离”,而磁力计则知道“运动方向”。在此方案中三种传感器充分利用各自的特长,来跟踪目标物体的运动。
27.以上内容是结合具体的优选实施例对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
