1.本发明涉及芯片检测技术领域,尤其涉及一种标定芯片吸嘴和顶针同心度的装置及方法。
背景技术:
2.通常,芯片在切割完成之后,需要对其外观进行检测,目前多数是对整个芯片晶圆进行检测,这种检测只能检测到芯片的上表面;在芯片外观检测工艺中,也需要对单个芯片进行检测,即检测芯片的正面和背面以及四个侧面,由此就需要将芯片单个从晶圆上取走并放到平台中检测,然后再移到另一个晶圆料盘上。芯片的取料结构中,采用最多的依旧是顶针、吸嘴模式,不同的芯片对应的吸嘴和顶针结构不同,相应的取料方式也有所差异。
3.现有的利用顶针、吸嘴取芯片的方式,都需要确保吸嘴和顶针同心,而对于如何标定将吸嘴和顶针同轴心,目前现有技术中基本是采用外置的放大镜或显微镜从侧面观测吸嘴和顶针的位置,这种方式操作起来较为麻烦,需要在吸嘴和顶针的x和y方向都设置放大镜或显微镜,而且标定出来的位置也会有较大的偏差,极为不便。
技术实现要素:
4.本发明的主要目的在于提供一种标定芯片吸嘴和顶针同心度的装置及方法,以解决如何快速准确标定吸嘴和顶针同心度的技术问题。
5.为实现上述目的,本发明提出一种标定芯片吸嘴和顶针同心度的装置,所述装置包括:取料手模组6、顶针模组7、预检相机模组8三个模块;其中:
6.所述取料手模组6安装在直线电机5上,通过直线电机5实现取料手模组6的整体运动;所述直线电机5安装在大理石平台1上;所述顶针模组7和预检相机模组8均安装在大理石平台1上,所述顶针模组7处在预检相机模组8的正下方,所述取料手模组6活动设置在顶针模组7和预检相机模组8之间,沿着水平和竖直方向运动。
7.其中,所述取料手模组6包括:z轴电缸601、吸嘴固定板602、滑轨安装板603、弹簧安装座604、滑块板605、吸嘴安装座606、吸嘴接头607、吸嘴锁紧套608、吸嘴609、探针610、微型气管接头611、探针安装块612、压缩弹簧613、透明盖板614、微型导轨615;所述z轴电缸601安装在直线电机5上,所述吸嘴固定板602安装在z轴电缸601上;所述滑轨安装板603安装在吸嘴固定板602的下端部;在所述滑轨安装板603的上下两端安装弹簧安装座604,所述微型导轨615竖直安装在滑轨安装板603的中部,微型导轨615的两端分别卡在弹簧安装座604内;所述滑块板605活动安装在微型导轨615上,所述滑块板605的上下两端设置有压缩弹簧613,所述压缩弹簧613的一端顶压滑块板605,另一端顶压弹簧安装座604;所述吸嘴安装座606固定在滑块板605上,在吸嘴安装座606的延伸端安装吸嘴接头607,所述吸嘴接头607下端连接吸嘴609,所述吸嘴609采用吸嘴锁紧套608锁紧;所述吸嘴安装座606与吸嘴接头607、吸嘴609导通,形成气路;在吸嘴安装座606的侧边连接微型气管接头611,外部真空气路通过微型气管接头611连接,并与吸嘴609导通,以实现吸嘴609真空吸附芯片。
8.其中,吸嘴安装座606的上方安装有透明盖板614;在吸嘴609的下方安装光源,在吸嘴609的上方安装预检相机,吸嘴609在对点位时,光源通过吸嘴609的内部气孔透过透明盖板614,通过在吸嘴609的上方安装的预检相机观测吸嘴609气孔的位置,确保吸嘴609与芯片中心对准,实现芯片取料位置标定;在滑块板605的侧边安装有一对探针610,所述探针610一个固定在滑块板605上,另一个通过探针安装块612固定在滑轨安装板603上,以对吸嘴609进行高度标定。
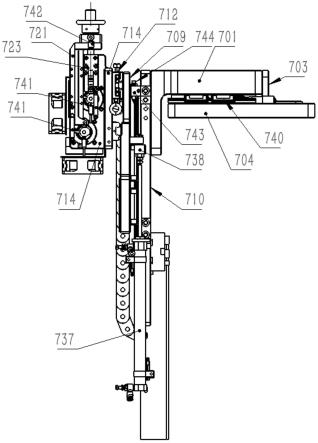
9.其中,所述顶针模组7包括:顶针组件固定块701、手动滑台a702、顶针组件限位块703、底板704、导轨a708、手动位移台滑块板709、顶针模组竖板710、气缸737、浮动接头738、气缸推杆头739、导轨c740、;其中:
10.在所述顶针模组竖板710右侧安装顶针组件固定块701,在所述顶针模组竖板710左侧安装手动位移台滑块板709;所述顶针组件固定块701下方安装有底板704,在顶针组件固定块701和底板704之间设置有手动滑台a702和导轨c740,用于整体调节顶针模组7,并且在顶针组件固定块701的末端设置有顶针组件限位块703,用来固定手动滑台a702;,在顶针模组竖板710和手动位移台滑块板709之间竖直安装有导轨a708;在顶针模组竖板710的侧边安装有气缸737,气缸737的缸体固定在顶针模组竖板710上,而气缸737的活动导杆头部通过气缸推杆头739固定在手动位移台滑块板709上,在气缸737的活动导杆头部位置还设置有浮动接头738;通过气缸737和导轨a708的设置,实现手动位移台滑块板709的整体数值方向的运动。
11.其中,在顶针模组竖板710上端安装有气缸限位块743,所述气缸限位块743上安装有液压缓冲器744,实现气缸737伸出时缓冲限位;在手动位移台滑块板709左侧设置有滑块板714,在手动位移台滑块板709和滑块板714之间安装有手动滑台b712和导轨b713,以实现滑块板714的调节;
12.在滑块板714上安装顶柱板721和顶针滑块板723,所述顶柱板721安装在滑块板714的左侧,顶针滑块板723安装在滑块板714的右侧;所述顶柱板721和顶针滑块板723下方均安装有相同的凸轮716、步进电机717、感应棒718、光电传感器719、限位杆720结构,以实现顶柱板721和顶针滑块板723的上下运动。
13.其中,所述顶柱板721与滑块板714之间设置有导轨,实现顶柱板721的上下活动;在顶柱板721底部安装有滚珠轴承722,所述滚珠轴承722下方活动连接一个凸轮716,所述凸轮716与步进电机717连接,通过步进电机717转动凸轮716,进而推动顶柱板721向上往复运动;并且在凸轮716上安装有感应棒718和限位杆720;所述步进电机717安装在滑块板714上,且滑块板714上安装有光电传感器719,所述光电传感器719与感应棒718配合,构成步进电机的原点位置,而限位杆720用于凸轮716的转动限位;
14.其中,在滑块板714上安装有拉伸弹簧b741,所述拉伸弹簧b741的一端固定在顶柱板721上,另一端固定在滑块板714上,以使得顶柱板721弹性上下运动;在滑块板714的中部也安装有相同的凸轮716、步进电机717、感应棒718、光电传感器719、限位杆720结构,所述凸轮716上方也连接有另一个滚珠轴承722;不同的是,所述滚珠轴承722与顶针滑块板723连接,所述顶针滑块板723通过导轨连接在滑块板714上,顶针滑块板723的下端连接有拉伸弹簧b741,所述拉伸弹簧741的另一端固定在滑块板714上,以实现顶针滑块板723上下弹性运动;
15.所述顶柱板721的上端部呈l型并向顶针滑块板723的上方延伸;所述顶针滑块板723的上端安装有顶针安装柱724,所述顶针安装柱724内部贯通,其顶部安装有顶针731,所述顶针731通过顶针固定头730锁紧,在顶针安装柱724内部沿着顶针731下方依次安装有顶块732、压缩弹簧733和顶丝736,通过顶丝736调节压缩弹簧733的压缩量,进而调节顶针731伸出顶针安装柱724的高度。
16.其中,在顶柱板721上端安装有顶柱头安装座726,所述顶针安装柱724间隙穿过顶柱板721上端的顶柱头安装座726,在顶柱头安装座726顶部螺纹连接有顶柱头729,所述顶柱头729上为一端开口的套筒结构,在所述顶柱头729的封闭端表面均匀分布有微小的通气孔;在顶柱头安装座726外侧安装有气管接头742,外部真空气路通过气管接头742进入到顶柱头安装座726内部,并沿着顶柱头安装座726和顶针安装柱724之间的间隙进入到顶柱头729内部,最后通过表面均匀分布的微小通气孔;
17.所述顶柱头安装座726与顶柱板721的连接处设置有密封圈a734,而顶针安装柱724与顶柱板721之间通过密封盖板725和密封圈b735圆周密封;顶针安装柱724上下运动的过程中,其上端的顶针731在顶柱头729表面中心的通气孔上伸缩,进而实现对芯片的顶起剥离;
18.在顶柱头安装座726外侧安装有防撞杯727,所述防撞杯727上围绕有拉伸弹簧a728,依次达到顶针模组7的弹性碰撞。
19.其中,所述预检相机模组8包括:预检电缸801、电缸安装板802、预检镜头安装板803、预检相机804、预检镜头805、预检镜头固定块a806、预检镜头固定块b807、环形光源808、预检镜头调节块809、环形光源安装板810、预检镜头调节座811;所述预检相机模组8通过电缸安装板802固定在大理石支撑块a2上,所述预检电缸801安装在电缸安装板802上,在预检电缸801的滑块上安装预检镜头安装板803;所述预检相机804安装在预检镜头805上,所述预检镜头805通过预检镜头固定块a806、预检镜头固定块b807锁紧,而所述预检镜头固定块b807通过预检镜头调节块809安装在预检镜头安装板803上,在预检镜头安装板803的两侧安装预检镜头调节座811;所述环形光源808通过环形光源安装板810安装在预检镜头安装板803的下端;所述环形光源808与预检镜头805同轴心;所述预检相机模组8用于通过相机拾取芯片的位置;预检镜头调节座811用于利用螺钉或顶丝调节预检镜头805的位置,进而调节预检相机804。
20.本发明还提出一种标定芯片吸嘴和顶针同心度的方法,包括以下步骤:
21.s1:移动取料手模组6,将取料手模组6上的吸嘴609移动至预检相机模组8的下方,并在吸嘴609下方打光;
22.s2:打开预检相机模组8上的预检相机804和环形光源808,通过与预检相机804连接的显示器观测吸嘴609通气孔的位置,判断通气孔是否在相机视野的中心;
23.s3:移动直线电机5,将吸嘴609移动到相机视野的x轴线上;
24.s4:在预检镜头调节座811上安装螺钉或顶丝;旋动螺钉或顶丝来调节预检镜头调节块809,进而调节预检相机804,使相机视野的y轴线与吸嘴609重合,保存此时直线电机5的位置,并固定好预检相机模组8,以实现预检相机804与吸嘴609的同心标定;
25.s5:将取料手模组6移出预检相机模组8的下方,然后启动气缸737,将顶针模组7向上抬升,然后控制步进电机717,将顶针731伸出顶柱头729;
26.s6:通过预检相机804观测顶针731的位置,判断顶针731是否在相机视野中心;
27.s7:调节顶针模组7上的手动滑台a702,将顶针731移动到相机视野的y轴线上;调节顶针模组7上的手动滑台b712,将顶针731移动到相机视野的x轴线上,由此实现顶针731处在相机视野的中心;
28.s8:固定手动滑台a702和手动滑台b712,由此完成吸嘴609、顶针731和预检相机804的同心标定。
29.本发明提出的一种标定芯片吸嘴和顶针同心度的装置及方法,利用预检相机,既实现了对芯片的采图,又能利用预检相机标定吸嘴和顶针的位置,不用另外设置安装放大镜或显微镜,省却了一些繁杂的结构;其中,在预检相机模组上设置可调节的预检镜头调节块,用于确保吸嘴和预检相机同心,既简洁又经济;而在顶针模组7上设置手动滑台a和手动滑台b,用于调节顶针模组的x\y方向;由此能够快速准确标定吸嘴和顶针同心度,避免取料位置偏差过大。
附图说明
30.图1是芯片吸嘴、顶针、相机标定结构轴测图a;
31.图2是芯片吸嘴、顶针、相机标定结构轴测图b;
32.图3是芯片吸嘴、顶针、相机标定结构主视图;
33.图4是芯片吸嘴、顶针、相机标定结构侧视图;
34.图5是芯片吸嘴、顶针、相机标定结构俯视图;
35.图6是取料手吸嘴结构示意图;
36.图7是取料手吸嘴吸嘴结构侧视图;
37.图8是顶针结构轴测图;
38.图9是顶针结构主视图;
39.图10是顶针结构剖视图a-a;
40.图11是顶针结构局部视图b;
41.图12是顶针结构局部视图c;
42.图13是顶针结构后视图;
43.图14是顶针结构侧视图;
44.图15是预检相机结构示意图;
45.图16是预检相机结构主视图;
46.图17是预检相机结构俯视图;
47.图18是预检相机结构侧视图。
48.附图标记:1.大理石平台;2.大理石支撑块a;3.大理石支撑块b;4.大理石支撑块c;5.直线电机;6.取料手模组;7.顶针模组;8.预检相机模组;
49.601.z轴电缸;602.吸嘴固定板;603.滑轨安装板;604.弹簧安装座;605.滑块板;606.吸嘴安装座;607.吸嘴接头;608.吸嘴锁紧套;609.吸嘴;610.探针;611.微型气管接头;612.探针安装块;613.压缩弹簧;614.透明盖板;615.微型导轨;
50.701顶针组件固定块;702.手动滑台a;703.顶针组件限位块;704.底板;705.拖链板a;706.拖链板b;707.拖链;708.导轨a;709.手动位移台滑块板;710.顶针模组竖板;711
端子转接板;712.手动滑台b;713.导轨b;714.滑块板;715.风扇;716.凸轮;717.步进电机;718.感应棒;719.光电传感器;720.限位杆;721.顶柱板;722.滚珠轴承;723.顶针滑块板;724.顶针安装柱;725.密封盖板;726.顶柱头安装座;727.防撞杯;728.拉伸弹簧a;729.顶柱头;730.顶针固定头;731.顶针;732.顶块;733.压缩弹簧;734.密封圈a;735.密封圈b;736.顶丝;737.气缸;738.浮动接头;739.气缸推杆头;740.导轨c;741.拉伸弹簧b;742.气管接头;743.气缸限位块;744.液压缓冲器;801.预检电缸;802.电缸安装板;803.预检镜头安装板;804.预检相机;805.预检镜头;806.预检镜头固定块a;807.预检镜头固定块b;808.环形光源;809.预检镜头调节块;810.环形光源安装板;811.预检镜头调节座。
具体实施方式
51.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
52.参见附图1~图18所示,本发明提出一种标定芯片吸嘴和顶针同心度的装置,包括取料手模组6、顶针模组7、预检相机模组8三个模块;所述取料手模组6安装在直线电机5上,通过直线电机5实现取料手模组6的整体运动;所述直线电机5安装在大理石支撑块c4上;所述大理石支撑块c4固定在大理石支撑块b3上,所述大理石支撑块b3固定在大理石平台1上;所述顶针模组7安装在大理石平台1上;所述预检相机模组8安装在大理石支撑块a2上;所述顶针模组7处在预检相机模组8的正下方,所述取料手模组6活动设置在顶针模组7和预检相机模组8之间,沿着水平和竖直方向运动。
53.参见附图6~图7,所述取料手模组6包括z轴电缸601、吸嘴固定板602、滑轨安装板603、弹簧安装座604、滑块板605、吸嘴安装座606、吸嘴接头607、吸嘴锁紧套608、吸嘴609、探针610、微型气管接头611、探针安装块612、压缩弹簧613、透明盖板614、微型导轨615;所述z轴电缸601安装在直线电机5上,所述吸嘴固定板602安装在z轴电缸601上;所述滑轨安装板603安装在吸嘴固定板602的下端部;在所述滑轨安装板603的上下两端安装弹簧安装座604,所述微型导轨615竖直安装在滑轨安装板603的中部,微型导轨615的两端分别卡在弹簧安装座604内;所述滑块板605活动安装在微型导轨615上,所述滑块板605的上下两端设置有压缩弹簧613,所述压缩弹簧613的一端顶压滑块板605,另一端顶压弹簧安装座604,由此使得滑块板605在微型导轨615上具备弹性,而且上下两个压缩弹簧613的作用一则时使吸嘴609吸取芯片时具备一定的弹性,二则是尽可能抵消滑块板605、吸嘴安装座606、吸嘴接头607、吸嘴锁紧套608、吸嘴609本身的重力。
54.而所述吸嘴安装座606固定在滑块板605上,在吸嘴安装座606的延伸端安装吸嘴接头607,所述吸嘴接头607下端连接吸嘴609,所述吸嘴609采用吸嘴锁紧套608锁紧;所述吸嘴安装座606与吸嘴接头607、吸嘴609导通,形成气路;在吸嘴安装座606的侧边连接微型气管接头611,外部真空气路通过微型气管接头611连接,并与吸嘴609导通,实现吸嘴609真空吸附芯片的效果。
55.吸嘴安装座606的上方安装有透明盖板614,所述透明盖板614的作用是可以使得吸嘴609在对点位的时候,在吸嘴609的下方安装光源,光源通过吸嘴609的内部气孔透过透明盖板614,然后在吸嘴609的上方安装的预检相机来观测吸嘴609气孔的位置,确保吸嘴609与芯片中心对准,实现芯片取料位置标定。
56.进一步地,在滑块板605的侧边安装有一对探针610,所述探针610一个固定在滑块
板605上,另一个通过探针安装块612固定在滑轨安装板603上,所述探针610的作用在于高度标定,因为吸嘴609更换后,吸嘴609的高度不一定和之前吸嘴609的位置等高,这样就需要重新做高度标定,即更换完吸嘴609后,可以将取料手模组6移动到设备的高度标定块的位置,然后下降z轴电缸601,当吸嘴609触碰到高度标定块的时候,整个滑块板605便受力抬升,两个探针610也随即分开,信号也就断开,由此确定当前的吸嘴609的高度位置与原先吸嘴609的位置相同,最后通过软件记住这个高度位置并保存。
57.参见附图8~图14,所述顶针模组7包括顶针组件固定块701、手动滑台a702、顶针组件限位块703、底板704、拖链板a705、拖链板b706、拖链707、导轨a708、手动位移台滑块板709、顶针模组竖板710、端子转接板711、手动滑台b712、导轨b713、滑块板714、风扇715、凸轮716、步进电机717、感应棒718、光电传感器719、限位杆720、顶柱板721、滚珠轴承722、顶针滑块板723、顶针安装柱724、密封盖板725、顶柱头安装座726、防撞杯727、拉伸弹簧a728、顶柱头729、顶针固定头730、顶针731、顶块732、压缩弹簧733、密封圈a734、密封圈b735、顶丝736、气缸737、浮动接头738、气缸推杆头739、导轨c740、拉伸弹簧b741、气管接头742、气缸限位块743、液压缓冲器744。
58.参见图14,在所述顶针模组竖板710右侧安装顶针组件固定块701,在所述顶针模组竖板710左侧安装手动位移台滑块板709;所述顶针组件固定块701下方安装有底板704,在顶针组件固定块701和底板704之间设置有手动滑台a702和导轨c740,用于整体调节顶针模组7,并且在顶针组件固定块701的末端设置有顶针组件限位块703,用来固定手动滑台a702。参见图11,在顶针模组竖板710和手动位移台滑块板709之间竖直安装有导轨a708;参见图13和图14,在顶针模组竖板710的侧边安装有气缸737,气缸737的缸体固定在顶针模组竖板710上,而气缸737的活动导杆头部通过气缸推杆头739固定在手动位移台滑块板709上,在气缸737的活动导杆头部位置还设置有浮动接头738;通过气缸737和导轨a708的设置,有效实现手动位移台滑块板709的整体数值方向的运动。
59.进一步地,为了对气缸737运动行程的限位,如图11所示,在顶针模组竖板710上端安装有气缸限位块743,所述气缸限位块743上安装有液压缓冲器744,实现气缸737伸出时缓冲限位。参见图14,在手动位移台滑块板709左侧设置有滑块板714,在手动位移台滑块板709和滑块板714之间安装有手动滑台b712和导轨b713,以此实现滑块板714的调节,并且本顶针模组7的设计,通过手动滑台a702和手动滑台b712的设计,实现顶针模组7x/y两个方向的调节。
60.更进一步地,参见图9、图11、图12和图14,在滑块板714上安装顶柱板721和顶针滑块板723,参见图11,所述顶柱板721安装在滑块板714的左侧,顶针滑块板723安装在滑块板714的右侧;所述顶柱板721和顶针滑块板723下方均安装有相同的凸轮716、步进电机717、感应棒718、光电传感器719、限位杆720结构,以此实现顶柱板721和顶针滑块板723的上下运动。具体地,所述顶柱板721与滑块板714之间设置有导轨,实现顶柱板721的上下活动;在顶柱板721底部安装有滚珠轴承722,所述滚珠轴承722下方活动连接一个凸轮716,所述凸轮716与步进电机717连接,通过步进电机717转动凸轮716,进而推动顶柱板721向上往复运动;并且在凸轮716上安装有感应棒718和限位杆720;所述步进电机717安装在滑块板714上,且滑块板714上安装有光电传感器719,所述光电传感器719与感应棒718配合,构成步进电机的原点位置,而限位杆720用于凸轮716的转动限位。
61.进一步地,参见图14,在滑块板714上安装有拉伸弹簧b741,所述拉伸弹簧b741的一端固定在顶柱板721上,另一端固定在滑块板714上,由此使得顶柱板721弹性上下运动。同理地,在滑块板714的中部也安装有相同的凸轮716、步进电机717、感应棒718、光电传感器719、限位杆720结构,所述凸轮716上方也连接有另一个滚珠轴承722;不同的是,所述滚珠轴承722与顶针滑块板723连接,而所述顶针滑块板723通过导轨连接在滑块板714上,顶针滑块板723的下端连接有拉伸弹簧b741,所述拉伸弹簧741的另一端固定在滑块板714上,由此也实现顶针滑块板723上下弹性运动。
62.参见图12,所述顶柱板721的上端部呈l型并向顶针滑块板723的上方延伸;所述顶针滑块板723的上端安装有顶针安装柱724,所述顶针安装柱724内部贯通,其顶部安装有顶针731,所述顶针731通过顶针固定头730锁紧,在顶针安装柱724内部沿着顶针731下方依次安装有顶块732、压缩弹簧733和顶丝736,通过顶丝736调节压缩弹簧733的压缩量,进而调节顶针731伸出顶针安装柱724的高度,也使得顶针731具备一定的弹性。
63.更进一步地,在顶柱板721上端安装有顶柱头安装座726,所述顶针安装柱724间隙穿过顶柱板721上端的顶柱头安装座726,在顶柱头安装座726顶部螺纹连接有顶柱头729,所述顶柱头729上为一端开口的套筒结构,在所述顶柱头729的封闭端表面均匀分布有微小的通气孔;在顶柱头安装座726外侧安装有气管接头742,外部真空气路通过气管接头742进入到顶柱头安装座726内部,并沿着顶柱头安装座726和顶针安装柱724之间的间隙进入到顶柱头729内部,最后通过表面均匀分布的微小通气孔。
64.而为了确保真空气路密封,所述顶柱头安装座726与顶柱板721的连接处设置有密封圈a734,而顶针安装柱724与顶柱板721之间通过密封盖板725和密封圈b735圆周密封,密封盖板725和密封圈b735的密封一则避免过多的漏气,二则保证顶针安装柱724依旧可以上下运动。顶针安装柱724上下运动的过程中,其上端的顶针731在顶柱头729表面中心的通气孔上伸缩,进而实现对芯片的顶起剥离。
65.进一步地,参见图12,在顶柱头安装座726外侧安装有防撞杯727,所述防撞杯727上围绕有拉伸弹簧a728,依次达到顶针模组7的弹性碰撞。
66.参见附图15~图18,所述预检相机模组8包括:预检电缸801、电缸安装板802、预检镜头安装板803、预检相机804、预检镜头805、预检镜头固定块a806、预检镜头固定块b807、环形光源808、预检镜头调节块809、环形光源安装板810、预检镜头调节座811;所述预检相机模组8通过电缸安装板802固定在大理石支撑块a2上,所述预检电缸801安装在电缸安装板802上,在预检电缸801的滑块上安装预检镜头安装板803;所述预检相机804安装在预检镜头805上,所述预检镜头805通过预检镜头固定块a806、预检镜头固定块b807锁紧,而所述预检镜头固定块b807通过预检镜头调节块809安装在预检镜头安装板803上,在预检镜头安装板803的两侧安装预检镜头调节座811;所述环形光源808通过环形光源安装板810安装在预检镜头安装板803的下端;所述环形光源808与预检镜头805同轴心。所述预检相机模组8的作用在于通过相机拾取芯片的位置;预检镜头调节座811的作用在于利用螺钉或顶丝调节预检镜头805的位置,进而调节预检相机804。
67.结合图1~图18,本发明一种标定芯片吸嘴和顶针同心度的方法,包括以下步骤:
68.s1:移动取料手模组6,将取料手模组6上的吸嘴609移动至预检相机模组8的下方,并在吸嘴609下方打光;
69.s2:打开预检相机模组8上的预检相机804和环形光源808,通过与预检相机804连接的显示器观测吸嘴609通气孔的位置,判断通气孔是否在相机视野的中心;
70.s3:移动直线电机5,将吸嘴609移动到相机视野的x轴线上;
71.s4:在预检镜头调节座811上安装螺钉或顶丝;旋动螺钉或顶丝来调节预检镜头调节块809,进而调节预检相机804,使相机视野的y轴线与吸嘴609重合,保存此时直线电机5的位置,并固定好预检相机模组8,由此实现预检相机804与吸嘴609的同心标定;
72.s5:将取料手模组6移出预检相机模组8的下方,然后启动气缸737,将顶针模组7向上抬升,然后控制步进电机717,将顶针731伸出顶柱头729;
73.s6:通过预检相机804观测顶针731的位置,判断顶针731是否在相机视野中心;
74.s7:调节顶针模组7上的手动滑台a702,将顶针731移动到相机视野的y轴线上;调节顶针模组7上的手动滑台b712,将顶针731移动到相机视野的x轴线上,由此实现顶针731处在相机视野的中心;
75.s8:固定手动滑台a702和手动滑台b712,由此完成吸嘴609、顶针731和预检相机804的同心标定。
76.完成吸嘴609、顶针731和预检相机804的同心标定后,将芯片移动到预检相机804视野的正下方,然后利用顶针731和吸嘴609将芯片取走,进而完成芯片的取料工作。
77.本发明一种标定芯片吸嘴和顶针同心度的装置及方法,利用预检相机,既实现了对芯片的采图,又能利用预检相机标定吸嘴和顶针的位置,不用另外设置安装放大镜或显微镜,省却了一些繁杂的结构;其中,在预检相机模组上设置可调节的预检镜头调节块,用于确保吸嘴和预检相机同心,既简洁又经济;而在顶针模组7上设置手动滑台a和手动滑台b,用于调节顶针模组的x\y方向;由此能够快速准确标定吸嘴和顶针同心度,避免取料位置偏差过大。
78.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,方案利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。