1.本发明涉及一种游泳场馆水体净化和清洁设备,尤其是一种仿生机器设备。
背景技术:
2.游泳场馆通常采用“循环过滤 补水”的方法保持水质。过滤不能去除的溶解在水体中的化学物质和有机物会沉积在池壁,进而引起细菌和藻类滋生,成为影响泳池水质的重要原因之一。因此,泳池的水体和池壁必须要定期清洁,以保持水质符合国家标准。
3.现有泳池清洁机器人,一是仅具备水面垃圾清理、水体净化、池壁清洁三种清洁功能中的部分功能,不能满足全方位清洁需要;二是清洁过程通常会影响泳池正常营业,而清洁不及时,进一步加重水体负荷;三是部分设备虽具有自动清洁功能,但采用“地毯式”全覆盖清洁模式,缺乏清洁针对性和水质监测数据的指导。此外,泳池清洁机器人作为服务机器人的一种,目前尚没有仿生机器人类型的产品。
技术实现要素:
4.为了克服现有技术中清洁功能不全面、清洁影响泳池营业、清洁操作缺乏水质监测数据指导等缺陷,本发明提供一种多功能游泳场馆仿生清洁机器人,同时具备水面垃圾清理、水体净化、池壁清理三种清洁功能;同时具备水质监测功能;且采用仿生设计,清洁过程可不影响泳池营业。
5.本发明解决其技术问题所采用的技术方案是:一种游泳场馆水体净化和清洁用仿生机器蝠鲼,在仿生蝠鲼“本体”上设计搭载智能控制、动力、行进、过滤净化、水质监测五个功能系统。
6.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,本体采用仿生学原理模拟海洋生物蝠鲼的外形和运动特点进行产品设计。头部配置全景高清摄像头、led照明,身体上配置探测传感器、压力传感器等,尾部连接可拆卸式弹性过滤袋。
7.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,智能控制系统装载位置位于蝠鲼的头部。工作指令可通过应用程序(app)下达;配置的高清摄像头可识别锁定垃圾和杂物;基于图像识别和传感器信号,识别并躲避障碍(包括但不限于人、泳池分道线、扶梯、救生圈等);设计采用声光报警方式,并同步发送信息到app,可对水质超标、运行维护(如过滤袋满袋、滤芯更换、电量低等)、设备异常(如传感器受损、机械故障等)等情形进行报警;所有运行记录、检测数据可存储并可上传进行云存储,可通过app查看、管理和分析。具备两种导航模式:一种是常规导航模式,可基于泳池区域的范围和形状,自主规划全覆盖清洁路径;另一种是自由巡航模式,可基于自动搜索反馈,自主到特定水域或地点进行清洁。
8.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,动力系统采用太阳能电池作为动力,装载位置位于蝠鲼的背部。太阳能电池板可拆卸,可使用替换电池板。
9.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,头部顶端有两个短小的头鳍,身体左右两侧各有一个柔性胸鳍,通过两个胸鳍不同方向的拍动产生推进力和转向力。左
右两个胸鳍各配置5个鳍条,每个鳍条都由一个小型电动马达驱动,通过鳍条带动柔性鳍的运动,实现游动效果。当需要贴壁工作时,依靠胸鳍运动和水泵排水产生的垂直于墙面的推力实现贴壁功能。
10.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,过滤净化系统装载位置位于蝠鲼的腹部体内,设计配置有垃圾过滤、水体净化、池壁清洁和杀菌消毒四个模块。水体净化模块通过预制的过滤包过滤实现。池壁清洁模块的清洁滚轮刷装载在蝠鲼的腹部体外,在电机的驱动下高速转动刷洗池壁。刷洗的污水经腹部的吸污口,经粗过滤包过滤后,净水从背部的排水口排出。滚轮刷可选用尼龙丝等材质。杀菌消毒模块通过通过鳍上紫外消毒灯带和腹部紫外灯带,采用波长为254 nm 的紫外线杀死泳池的病毒、细菌和寄生虫等。
11.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,污水从蝠鲼的口部进入后,在第一水泵运转产生的负压的引流下,有两条路径。在水体净化模式下,控制挡板闭合于b点,水体通过净化路径,通过净化过滤包过滤后,净水从背部的排水口排出在泳池中。在垃圾过滤模式下,控制挡板闭合于a点,水体在第一水泵高速运转产生的负压的引流下,经粗过滤包过滤去除固体垃圾后净水从背部的排水口排出。为避免垃圾堆积在过滤板表面而影响过滤效率,利用第二水泵产生的切向流过滤将垃圾带入尾部的弹性过滤袋。
12.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,尾部弹性过滤袋为双层结构,通过四个搭扣与本体相连。内层为无弹性的无纺布,外层为弹性网格袋。弹性网格袋起到保护内层无纺布袋、塑形并减少行进阻力的作用。当收集的垃圾撑起无纺布袋时,网格袋随之鼓起。
13.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,水质监测系统装载位置位于蝠鲼的背部。设计监测项目可包括:游泳池水混浊度、ph值、尿素、游离性余氯、氧化还原电位orp、温度。两端开口的取样管突出且平行于蝠鲼身体,以便于取水样。执行取样命令时,样品管末端的挡板弹起,保持样品稳定,开始检测。检测结束后,挡板弹回。在取样管内部配置电极、浊度传感器、ph探头、温度探头等。电极、探头和传感器的探针凸设伸入至检测腔体内。检测结果显示在数显器上,同时传送到app上。可设定检测间隔时间、警戒限和行动限。当检测结果超警戒限时,光报警(橙色)启动;超行动限时,光报警(红色)和声报警同时启动。
14.上述的游泳场馆水体净化和清洁用仿生机器蝠鲼,采用防水电机,旋转轴与箱体密封、管线连接密封、螺纹连接密封采用固定式o型密封圈,其他采用密封胶进行密封处理。表面选用非金属防腐蚀材料(可选用尼龙和丁晴橡胶),防腐的同时达到减轻自重的目的。鳍表面涂覆耐腐蚀涂层做防水覆膜处理。
15.本发明的有益效果,一是基于水质监测结果和图像识别结果,主动识别异物或污染水体而自主进行水体净化和清洁,提高清洁针对性;二是兼具水面垃圾清理、水体净化、池壁清理三种清洁功能,有利于提高清洁效率;三是采用仿生设计,不仅使清洁过程不影响游泳,同时增加机器人工作时的美观性和游泳的趣味性。通过提高清洁操作的便利性、及时性和效率,合理减少泳池整体换水频次或补水量。
附图说明
16.下面结合附图和实施例对本发明进一步说明。
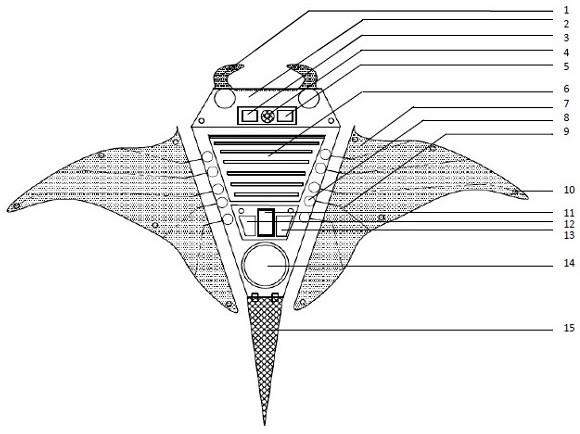
17.图1为本发明一种游泳场馆水体净化和清洁用仿生机器蝠鲼结构示意图(背部);图2为本发明一种游泳场馆水体净化和清洁用仿生机器蝠鲼结构示意图(腹部);图3为沿着图1中对称轴的横截面结构示意图;图4为沿着图1中对称轴的横截面水流示意图;图中1.头鳍,2.智能控制主板,3.led照明灯,4.全景高清摄像头,5.声光报警器,6.太阳能电池板,7.柔性鳍,8.电动马达,9. 鳍条,10.鳍传感器,11.水质检测管,12. 水质报警灯,13.数显器,14.出水口,15. 弹性过滤袋,16. 头部传感器,17. 吸污口,18. 腹部紫外消毒灯带,19.清洁滚轮刷,20.鳍上紫外消毒灯带,21.第一水泵,22.第二水泵,23. 清洁模式控制挡板,24.净化过滤包,25.滚轮刷电机,26.导水条,27.粗过滤包。
具体实施方式
18.【实施例1】如图1所示,本发明提供了一种游泳场馆水体净化和清洁用仿生机器蝠鲼,包括仿生蝠鲼“本体”,及设计搭载的智能控制、动力、行进、过滤净化、水质监测系统。头部装配智能控制主板2和一对头鳍1。采用太阳能电池作为动力,装载位置位于蝠鲼的背部,电池板6可拆卸、可替换。左右两个柔性胸鳍7通过电动马达8驱动的鳍条9带动运动,通过胸鳍不同方向的拍动产生推进力和转向力。装载于蝠鲼背部的水质监测管11可设计监测包括游泳池水混浊度、ph值、尿素、游离性余氯等水质指标,结果显示在数显器13上。当水质超标时,水质报警灯12亮起进行预警。头部配置全景高清摄像头4、led照明灯3,通过头部传感器16和鳍传感器10探测障碍物。头部声光报警器5可对运行维护、设备异常等情形进行报警。通过鳍上紫外消毒灯带20和腹部紫外灯带18,采用波长为254 nm 的紫外线进行杀菌。尾部弹性过滤袋15通过四个搭扣与本体相连。
19.在本实施例中,如图4所示,污水从蝠鲼的口部进入后,在第一水泵21运转产生的负压的引流下,有两条路径。在水体净化模式下,清洁控制挡板23闭合于b点,水体通过净化过滤包24过滤,净水从背部的排水口14排出。在垃圾过滤模式下,控制挡板闭合于a点,水体在第一水泵高速运转产生的负压的引流下,经粗过滤包27过滤去除固体垃圾后,净水从背部的排水口14排出。装载在蝠鲼的腹部体外的清洁滚轮刷19,在混轮刷电机25的驱动下高速转动刷洗池壁。刷洗的污水经腹部的吸污口17,经粗过滤包27过滤后,净水从背部的排水口排出。设若干导水条26防止污水倒流。
20.【实施例2】在实施例1的基础上,本发明提供一种技术方案:优选的,过滤填料选用可通过反冲洗方便进行处理的填料,如微孔活性炭填料等。可通过定期进行反冲洗提高装置的使用效率,降低使用成本。
21.【实施例3】在实施例1的基础上,本发明提供一种技术方案:优选的,采用第二水泵22与第一水泵交替运行方式,利用第二水泵产生的切向流过滤将垃圾带入尾部的弹性过滤袋;或者在第二水泵旁增加第三水泵,第三水泵采用间歇运行方式,以避免垃圾堆积在过滤包表面而影响过滤效率。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。