1.本发明涉及一种可重构自由度形式的三自由度并联机构,属于并联机器人技术领域。
背景技术:
2.并联机构较串联机构具有反解容易、可控性好、精度高、工作稳定等优点。三自由度并联机构在工业领域有大量的应用,其可以完成快速抓取、专配、分拣等工作,目前工业上应用的机构主要有delta机构、cross-iv等。但这些机构只能完成特定自由度的运动,例如三自由度移动或者两转一移等,当特定自由度的运动不能满足使用要求时,只能通过更换机构的方法来完成工作任务,不仅增加了设备投资,而且会影响工作效率。因此寻找一种可以快速转换自由度形式的并联机构是十分必要的。
技术实现要素:
3.本发明的目的在于针对现有技术之弊端,提供一种可重构自由度形式的三自由度并联机构,以降低设备投资,提高工作效率。
4.为实现上述目的,本发明采用如下技术方案:一种可重构自由度形式的三自由度并联机构,包括定平台、动平台和绕定平台的轴线均布的三条支链,每条支链均包括直线滑轨、滑块、扭转机构、转动块、连杆和两个虎克铰,所述直线滑轨的上端与定平台垂直连接,所述滑块与直线滑轨滑动连接并通过扭转机构与转动块连接,从而使转动块能够随滑块上下移动和绕水平轴线旋转,所述连杆的一端通过第一虎克铰与转动块连接,另一端通过第二虎克铰与动平台连接。
5.上述可重构自由度形式的三自由度并联机构,所述扭转机构包括扭转电机、电机座、联轴器、轴承和转轴,所述转轴通过轴承与滑块转动连接,转轴的垂直平分面经过定平台的轴线,转动块固定在转轴的中部,所述扭转电机通过电机座固定在滑块上,扭转电机的输出轴通过联轴器与转轴连接。
6.上述可重构自由度形式的三自由度并联机构,每个虎克铰包括一个十字轴和两个半圆环,所述十字轴包括相互垂直的a轴和b轴,二者的两端分别与两个半圆环的两端转动连接;第一虎克铰的a轴通过一个半圆环与转动块连接,从而可随转动块转动到与直线滑轨平行或者与定平台平行并指向定平台的轴线,第一虎克铰的b轴通过一个半圆环与连杆连接;第二虎克铰的a轴通过一个半圆环与连杆连接,b轴通过一个半圆环与动平台连接;第二虎克铰的a轴与第一虎克铰的b轴平行并与连杆垂直,第二虎克铰的b轴平行于动平台。
7.上述可重构自由度形式的三自由度并联机构,所述滑块设有使其沿直线滑轨滑动的驱动装置,所述驱动装置为电机驱动装置、液压驱动装置或气压驱动装置。
8.上述可重构自由度形式的三自由度并联机构,所述扭转电机为步进电机。
9.本发明利用扭转机构来改变虎克铰的姿态,通过改变虎克铰的姿态来实现自由度形式的重构,使并联机构既可以工作在三自由度移动模式,也可以工作在三自由度转动模
式,在不更换机构的情况下使动平台完成不同的空间运动,从而有效降低了设备投资,提高了工作效率。
10.此外,本发明还具有工作空间大,运动灵活,控制简单等优点。
附图说明
11.下面结合附图和具体实施方式对本发明作进一步详细的说明。
12.图1为本发明的三自由度移动状态示意图;图2为本发明的三自由度转动状态示意图;图3为支链的三自由度移动状态示意图;图4为支链的三自由度转动状态示意图;图5为虎克铰的结构示意图;图6为转换机构的结构示意图。
13.图中各标号为:1、定平台,2、直线滑轨,3、支链,4、动平台,5、滑块,6、第一虎克铰,7、连杆,8、第二虎克铰,9、扭转电机,10、电机座,11、联轴器,12、轴承,13、转动块,14、转轴,15、半圆环,16、十字轴。
具体实施方式
14.本发明提供了一种可重构自由度形式的三自由度并联机构,该机构可以根据使用者的不同要求切换为三自由度移动形式或三自由度转动形式,同时该机构是少自由度机构,又避免了自由度的冗余。该机构的提出增加了并联机构在工业上的选择。
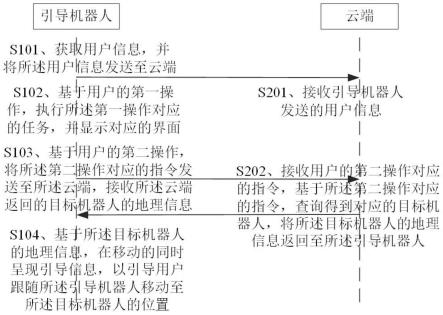
15.如图1和2所示,本发明主要由三部分组成,即定平台1、动平台4以及连接定平台1与动平台4的三条支链3。其中三条支链呈120度安装在动平台4与定平台1之间,各条支链完全相同,都包括直线滑轨2、安装在直线滑轨2上的滑块5、扭转电机9、电机座10、联轴器11、轴承12、转轴14、转动块13、第一虎克铰6、连杆7、安装在动平台4上的第二虎克铰8,支链相同可以降低加工成本。
16.安装时,彼此平行的三根直线滑轨2绕定平台1的竖直轴线均匀分布(即三根直线滑轨互成120度),它们的上端垂直固定于定平台1的下表面,每条支链上的滑块5(即移动副)安装在直线滑轨2上,滑块5只能沿直线滑轨2上下滑动,限制滑块5其他轴线上的自由度。转动块13固定在转轴14上,转轴14通过轴承12与滑块5转动连接,扭转电机9通过电机座10固定在滑块5上,扭转电机9的输出轴通过联轴器11与转轴14连接,连杆7的一端通过第一虎克铰6与转动块13连接,另一端通过第二虎克铰8与动平台4连接。
17.第一虎克铰6和第二虎克铰8的结构相同,都包括一个十字轴16和两个半圆环15,两个半圆环15的两端分别与十字轴的a轴和b轴的两端转动连接,两个半圆环15用于与其他部件相连接。
18.第一虎克铰6和第二虎克铰8的具体连接方式为:第一虎克铰6的a轴通过一个半圆环15与转动块13连接,b轴通过一个半圆环15与连杆7连接,第二虎克铰8的a轴通过一个半圆环15与连杆7连接,b轴通过一个半圆环15与动平台4连接;第二虎克铰8的a轴平行于第一虎克铰6的b轴,第二虎克铰8的b轴平行于动平台4。
19.转动块13在扭转电机9的驱动下绕转轴14旋转,并带动第一虎克铰6的a轴同步旋
转,从而实现自由度形式的重构。
20.如图1所示,建立支链坐标系a-xyz,坐标系原点在第一虎克铰6的转动中心(即其十字轴的中心点),规定z轴平行于直线滑轨2并指向上方、x轴平行于定平台且指向定平台的竖直轴线。当第一虎克铰6的a轴平行于规定的x轴时,该机构为三自由度移动形式;当将直线滑轨上的滑块至于同一高度,并将第一虎克铰的a轴进行转动,使其平行于直线滑轨2时,该机构为三自由度转动形式(动平台4绕x轴y轴转动和沿z轴移动)。
21.该并联机构的驱动装置安装在滑块5上,可以通过电机驱动也可以通过液压和气压驱动。通过滑块的上下移动带动虎克铰进行移动,同时使虎克铰进行转动,进而改变连杆的位姿,使得连接于动平台的虎克铰发生位姿改变,最终驱动并联机构的动平台完成所要求的动作。
22.初始安装时该机构为三自由度移动形式,每条支链的第一虎克铰6的a轴平行于规定的该条支链的x轴,即平行于定平台1且指向定平台的竖直轴线,第二虎克铰8的a轴平行于第一虎克铰6的b轴,第二虎克铰8的b轴平行于第一虎克铰6的a轴且平行于动平台4。当该机构变换为三自由度转动形式时,需将三个滑块至于同一高度,同时将各支链第一虎克铰6的a轴进行转动,使之平行于z轴,此时该机构的动平台4具有绕x轴y轴转动和沿z轴移动自由度。
23.下面通过螺旋方法明确两种不同的自由度形式。当机构为三自由度移动形式时,分析单个支链螺旋系,公式如下:$1=(000;001)$2=(100;000)$3=(010;000)$4=(000;d40f4)(1)$5=(100;0e5f5)$6=(010;d60f6)由螺旋推得反螺旋得:$
1r
=(000;001)(2)公式(2)表明,当每条支链的第一虎克铰6的a轴平行于第二虎克铰8的b轴时(如图3),每条支链对动平台施加的是一个约束力偶。三条支链施加的三个力偶互相不平行,彼此线性无关,3个力偶限制了动平台的三个转动,所以动平台只具有三自由度移动。
24.$1=(000;001)$2=(001;000)$3=(010;000)$4=(000;d40f4)(3)$5=(010;000)$6=(100;0e60)由螺旋推得反螺旋得:$
1r
=(010;000)(4)公式(4)表明,当每条支链的第一虎克铰6的a轴平行于直线滑轨2时(如图4),三条支链对动平台施加的约束力相互交错,三个力在同一平面,从而限制了两个自由度的移动
和一个自由度的转动,所以动平台只具有三自由度转动。
25.本发明通过改变虎克铰的轴线方向实现机构自由度的快速切换。同时该机构具有并联机构的优点,即反解简单、可控性好、精度高、工作稳定等优点。
26.上面结合附图对该并联机构进行了详细的阐述,其旨在为实际生产中提供一种可变自由度形式的三自由度并联机构。但是本发明并不局限于上述所述方案,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。