1.本发明涉及一种悬浮茶几系统,属于茶几技术领域。
背景技术:
2.茶几通常和茶文化结合在一起,在我国历史悠久,影响深远。现代的茶几在材质上既有对以往古板的承袭,又同时重视复合材料的运用及多种元素的组合,在神态方面更是远远跨越了常规想象。茶几早已不再是主家具的从属品,而是有着自己光显的特性和潮流感。
3.在进行会客交流时,如果是传统茶几,主人需要起身接水泡茶并将泡好茶的茶杯递到客人手中,随着现代化科技的不断发展,人们越来越倾向于智能控制代替这类简单的人工操作。
4.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域普通技术人员所公知的现有技术。
技术实现要素:
5.本发明的目的在于克服现有技术中的不足,提供一种悬浮茶几系统,将磁悬浮技术与传统的茶几相结合,实现磁悬浮茶几的自动加水以及悬浮递茶的功能效果。
6.为达到上述目的,本发明是采用下述技术方案实现的:本发明公开了一种悬浮茶几系统,包括茶座、传动组件、悬浮基座、悬浮托盘、传感器、加水器和控制单元,所述茶座上安装有加水器,所述茶座内安装有传动组件,所述传动组件连接悬浮基座,所述悬浮基座悬浮连接悬浮托盘,所述悬浮托盘上设置有茶杯;所述传感器,安装于茶座上,用于采集环境数据,输出递茶信号,和/或加水信号至控制单元;所述控制单元,用于根据所述递茶信号,控制传动组件的动作,从而带动茶杯一并移动至递茶位置;根据所述加水信号,控制传动组件的动作,从而带动茶杯一并移动至加水位置,并控制所述加水器进行加水。
7.进一步的,所述传感器包括图像传感器、语音传感器以及距离传感器,所述环境数据包括图像数据、语音数据以及距离数据。
8.进一步的,所述传动组件包括支撑腿、支撑杆、x轴传动机构、y轴传动机构、z轴传动机构和茶托支撑架,所述支撑杆设置于支撑腿上,所述x轴传动机构设置于支撑杆上,所述y轴传动机构连接x轴传动机构,所述z轴传动机构连接y轴传动机构,所述茶托支撑架连接z轴传动机构,所述悬浮基座安装于茶托支撑架上。
9.进一步的,所述x轴传动机构包括x轴步进电机、x轴传动轴、x轴同步带轮、x轴滑块和x轴导轨,
所述x轴步进电机通过x轴传动轴连接x轴同步带轮,所述x轴同步带轮通过同步带连接x轴滑块,所述x轴滑块滑动连接x轴导轨,所述x轴导轨设置于支撑杆上。
10.进一步的,所述x轴导轨在远离x轴步进电机的端部设有x轴限位开关。
11.进一步的,所述y轴传动机构包括y轴步进电机、y轴同步带轮、y轴滑块和y轴导轨,所述y轴步进电机的输出轴连接y轴同步带轮,所述y轴同步带轮通过同步带连接y轴滑块,所述y轴滑块滑动连接y轴导轨,所述y轴导轨设置于x轴滑块上。
12.进一步的,所述y轴导轨在远离y轴步进电机的端部设有y轴限位开关。
13.进一步的,所述z轴传动机构包括z轴步进电机、z轴同步带轮、z轴滑块和z轴导轨,所述z轴步进电机的输出轴连接z轴同步带轮,所述z轴同步带轮通过同步带连接z轴滑块,所述z轴滑块滑动连接z轴导轨,所述z轴导轨设置于y轴滑块上;所述茶托支撑架连接z轴导轨。
14.进一步的,所述z轴导轨在远离z轴步进电机的端部设有z轴限位开关。
15.进一步的,所述悬浮托盘包括上盖和下盖,所述上盖的下方和下盖的上方均设有凹槽,所述凹槽内安装有悬浮磁体。
16.与现有技术相比,本发明所达到的有益效果:本发明的悬浮茶几系统,通过传感器对环境数据的采集,输送递茶信号,以及加水信号至控制单元,控制单元根据收到的信号控制传动组件或加水器动作,从而实现磁悬浮茶几的自动加水以及悬浮递茶的功能效果。
附图说明
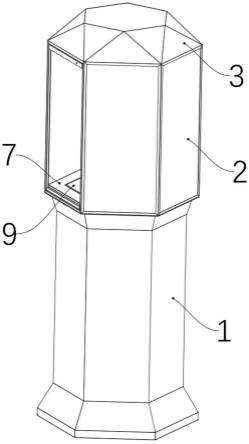
17.图1是一种悬浮茶几系统的结构示意图;图2是一种悬浮茶几系统的外观图;图3是传动组件的结构示意图;图4是悬浮托盘的结构示意图;图5是一种悬浮茶几系统的控制关系图;图中:1、茶座;2、传动组件;3、悬浮基座;4、悬浮托盘;5、传感器;6、加水器;7、茶杯;8、控制单元; 201、支撑腿;202、支撑杆;203、茶托支撑架;204、x轴步进电机;205、x轴传动轴;206、x轴同步带轮;207、x轴滑块;208、x轴导轨;209、x轴限位开关;210、y轴步进电机;211、y轴同步带轮;212、y轴滑块;213、y轴导轨;214、y轴限位开关;215、z轴步进电机;216、z轴同步带轮;217、z轴滑块;218、z轴导轨;219、z轴限位开关; 401、上盖;402、下盖;403、悬浮磁体。
具体实施方式
18.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
实施例
19.本实施例提供了一种悬浮茶几系统,如图1-2所示,包括茶座1、传动组件2、悬浮基座3、悬浮托盘4、传感器5、加水器6和控制单元8,
茶座1上安装有加水器6,茶座1内安装有传动组件2,传动组件2连接悬浮基座3,悬浮基座3悬浮连接悬浮托盘4,悬浮托盘4上设置有茶杯7;传感器5,安装于茶座1上,用于采集环境数据,输出递茶信号,和/或加水信号至控制单元8;控制单元8,用于根据递茶信号,控制传动组件2的动作,从而带动茶杯7一并移动至递茶位置;根据加水信号,控制传动组件2的动作,从而带动茶杯7一并移动至加水位置,并控制加水器6进行加水。
20.本发明的技术构思为:传感器5通过对环境数据的采集,从而输出信号至控制单元8,控制单元8根据收到的信号控制传动组件2,带动茶杯7实现空间内上下左右的移动,以及控制加水器6的开关状态,最终实现磁悬浮茶几的自动加水以及悬浮递茶的功能效果。
21.具体的,控制单元8安装于茶座1上。传感器5包括图像传感器5、语音传感器5以及距离传感器5,环境数据包括图像数据、语音数据以及距离数据。其中,图像数据包括环境中的手势信息,语音数据包括语音的控制指令,距离数据包括检测接近的非透明的物体的信息,这些数据可以根据操作人的具体需求进行设置触发。当传感器5采集到如上数据信息时,例如采集到手势图像数据或者语音控制指令或者接近距离数据,则输出信号至控制单元8。
22.加水器6包括抽水泵和加水口,抽水泵的控制开关连接控制单元8,抽水泵的出水端连接加水口。
23.如图1、2和4所示,悬浮托盘4包括上盖401和下盖402,上盖401的下方和下盖402的上方均设有凹槽,凹槽内安装有悬浮磁体403。
24.其中,上盖401和下盖402的材质可以为轻质塑料或其它轻质材料。本实施例中的悬浮磁体403为圆形永磁体。
25.悬浮基座3为磁性基座,内部包含一个环形磁体或多个永磁体组成环形磁体,悬浮磁体403上方磁场方向向上,因环形永磁体的磁场分布,对悬浮磁体403呈相吸趋势。悬浮磁体403下方磁场方向向下,对悬浮磁体403呈相斥趋势,由此为悬浮托盘4提供了悬浮于悬浮基座3上力,且茶杯7的重力能够被悬浮基座3和悬浮磁体403之间产生的磁斥力所平衡。
26.进一步地,为了使被悬浮体稳定悬浮,本实施例的悬浮基座3内部安装一环形永磁体的基础上,继续安装三个弧形线圈且它们位于同一轴心,并等距分布在所述的环形磁铁内侧,它们的作用是当浮子在发生偏移时,为其在相对平行方向上提供牵引力,将其拉回中央位置。线圈的中心位置安装有位置传感器,作用在于实时检测上方悬浮磁体403的位置的变化并反馈给控制单元8,控制单元8根据反馈数据实时控制调节线圈的磁场方向和电流大小,以使得悬浮磁体403始终平衡在中心位置。最终通过环形永磁体中心对悬浮磁体403的自锁平衡点,再配合弧形线圈的控制,以使得悬浮磁体403始终平衡在中心位置,从而实现全自由度磁悬浮。
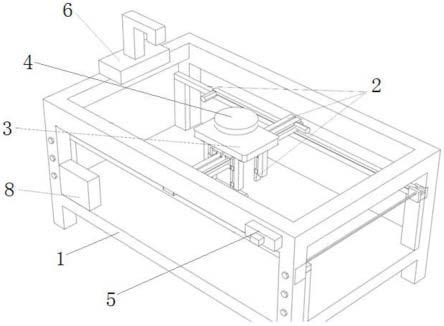
27.如图3所示,传动组件2包括支撑腿201、支撑杆202、x轴传动机构、y轴传动机构、z轴传动机构和茶托支撑架203,其中支撑腿201的数量为4个,支撑杆202的数量为2个,茶托支撑架203的数量为2个。
28.支撑杆202设置于支撑腿201上,x轴传动机构设置于支撑杆202上,y轴传动机构连接x轴传动机构,z轴传动机构连接y轴传动机构,茶托支撑架203连接z轴传动机构,悬浮基
座3安装于茶托支撑架203上;x轴传动机构包括x轴步进电机204、x轴传动轴205、x轴同步带轮206、x轴滑块207和x轴导轨208, x轴步进电机204通过x轴传动轴205连接x轴同步带轮206,x轴同步带轮206通过同步带连接x轴滑块207,x轴滑块207滑动连接x轴导轨208,x轴导轨208设置于支撑杆202上。且x轴导轨208在远离x轴步进电机204的端部设有x轴限位开关209。其中,x轴步进电机204、x轴传动轴205、x轴同步带轮206的数量均为一个,x轴导轨208的数量为2个,且对称分布于支撑杆202上,每个x轴导轨208的上方安装有相配合的x轴滑块207。
29.y轴传动机构包括y轴步进电机210、y轴同步带轮211、y轴滑块212和y轴导轨213,y轴步进电机210的输出轴连接y轴同步带轮211,y轴同步带轮211通过同步带连接y轴滑块212,y轴滑块212滑动连接y轴导轨213,y轴导轨213设置于x轴滑块207上。且y轴导轨213在远离y轴步进电机210的端部设有y轴限位开关214。其中,y轴步进电机210、y轴同步带轮211的数量均为一个,y轴导轨213的数量为2个,且对称分布于x轴滑块207上,每个y轴导轨213的上方安装有相配合的y轴滑块212。
30.z轴传动机构包括z轴步进电机215、z轴同步带轮216、z轴滑块217和z轴导轨218, z轴步进电机215的输出轴连接z轴同步带轮216,z轴同步带轮216通过同步带连接z轴滑块217,z轴滑块217滑动连接z轴导轨218,z轴导轨218设置于y轴滑块212上;茶托支撑架203连接z轴导轨218。且z轴导轨218在远离z轴步进电机215的端部设有z轴限位开关219。其中,z轴步进电机215、z轴同步带轮216的数量均为一个,z轴导轨218的数量为2个,且对称分布于y轴滑块212上,每个z轴导轨218的上方安装有相配合的z轴滑块217。
31.x轴限位开关209、y轴限位开关214、z轴限位开关219的作用是当控制单元8控制悬浮基座3运动到未端时产生限位信号,从而控制悬浮基座3停止向前移动,将悬浮基座3的移动空间限制在预设的范围内,防止脱离轨道。
32.如图5所示,控制单元8包括核心控制器、电子开关和步进电机驱动器,核心控制器分别控制连接电子开关和步进电机驱动器;电子开关分别连接抽水泵和悬浮基座,步进电机驱动器分别控制连接x轴步进电机204、y轴步进电机210、z轴步进电机215;核心控制器还分别连接x轴限位开关209、y轴限位开关214、z轴限位开关219以及传感器5。其中,x轴步进电机204转动,带动x轴传动轴205和x轴同步带轮206一起转动,进而通过传送带带动x轴滑块207在x轴导轨208滑动,从而带动y轴导轨213的移动,即实现了悬浮基座3在x轴方向上的移动。其中,当运动到x轴限位开关209处时,引起x轴限位开关209的电平变化,从而核心控制器通过步进电机驱动器控制步进电机停止转动,等待下一步指令。y轴传动机构与z轴传动机构的控制原理相同,最终通过x轴传动机构、y轴传动机构、z轴传动机构的联合运动控制实现悬浮物在空间一定范围内的x,y,z三个方向的运动。
33.具体的,核心控制器为微型单片机,具体可为市售国产芯片esp32,根据不同场景的需求也可以选用不同型号的微型单片机,在此不做限制。
34.首先,系统得电后,核心控制器通过步进电机驱动器分别控制x轴步进电机204、y轴步进电机210、z轴步进电机215使得传动组件2初始化复位。一直到x轴限位开关209,y轴限位开关214,z轴限位开关219发出低电平信号。
35.核心控制器收到上述的三个方面的低电平信号后,立即通过所述的步进电机驱动器控制x轴步进电机204、y轴步进电机210、z轴步进电机215停止转动。
36.核心控制器收到传感器5输出的加水信号,先通过步进电机驱动器控制x轴步进电机204、y轴步进电机210、以及z轴步进电机215转动,使得悬浮托盘4运动至自动加水部分的下方。再通过电子开关打开抽水泵,从加水口为悬浮托盘4上的水杯加水。
37.核心控制器收到传感器5输出的递茶信号,通过步进电机驱动器控制x轴步进电机204、y轴步进电机210、以及z轴步进电机215转动,使悬浮托盘4运动至设定的送茶位置。
38.需要强调的是,传感器5还能够根据采集的环境数据,发送其他信号,例如复位信号。此时,核心控制器继续通过步进电机驱动器e02控制x轴步进电机204、y轴步进电机210、以及z轴步进电机215转动,使得所述的悬浮托盘4运动回初始位置,等待下一次信号。在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、
ꢀ“
底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
40.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。