1.本发明涉及到环境构设领域任务规划技术,特别涉及一种基于环境构设的无人空中平台任务规划与推演方法,适用于蓝方训练环境构设场景,也可以应用到其他场景的任务规划与推演领域。
背景技术:
2.无人空中平台一般包括无人机、飞艇、无人直升机和小型无人机。蓝方也称“威胁目标”“假想敌”,是按照敌方编制装备、战术原则等组成的专门模拟敌方的组织。蓝方应用多种型号的无人空中平台模拟敌方(卫星、精确制导武器、飞机)在特定区域构设空中威胁。地面站系统中任务规划面临两个难点:
3.一是无人空中平台与所要构设的蓝方威胁在能力性能和作战使用上的存在差异,尤其是与卫星、精确制导武器等威胁的差异非常大。
4.二是任务规划面临的无人空中平台数量多且型号差异较大,而现有无人空中平台的任务规划都是针对特定型号的无人空中平台研制,仅能支持一种型号的无人空中平台执行特定任务。且各种不同型号无人任务规划系统间通常不兼容。
5.此外,传统任务规划不具备推演能力,不能直观的为指战人员展示任务执行的动态过程,不利于无人空中平台操作员事先了解任务。
技术实现要素:
6.有鉴于此,本发明提出了一种基于环境构设的无人空中平台任务规划与推演方法。该方法把复杂的环境构设任务要求等效和分解成无人空中平台可执行的小任务,进而对无人空中平台进行航线、载荷、链路通信等任务规划,生成无人空中平台任务计划,通过仿真分析与动态演示,综合分析、验证飞行安全和任务可行性。
7.为了实现上述目的,本发明所采取的技术方案为:
8.一种基于环境构设的无人空中平台任务规划与推演方法,具体包括以下步骤:
9.(1)接收上级下发的环境构设要求;
10.(2)若环境构设要求是蓝方模拟对象的任务,则进行等效处理,将蓝方模拟对象的任务等效处理成无人空中平台可执行的任务;否则执行步骤(3);其中蓝方模拟对象的任务包括模拟卫星侦察任务、模拟精确制导武器打击任务、模拟察打任务和模拟干扰任务;
11.(3)对环境构设要求进行分析,确定模拟任务类型,对复杂模拟任务进行分析和分解,抽取出无人空中平台为达成特定任务效果所需活动的任务区域及时间要求、载荷使用要求和其它约束条件,其它约束条件包括速度和维度;
12.(4)根据步骤(3)抽取的要求和约束条件确定环境信息、预期效果和可用资源环境构设基本要素,并综合无人空中平台信息和任务载荷信息完成任务量化,进行无人空中平台和载荷筛选;
13.(5)根据无人空中平台选型结果和载荷选型结果,形成任务场景;
14.(6)根据任务场景进行任务规划,生成无人空中平台任务计划,并在任务执行过程中,接收到临机调整指令后重新根据任务场景进行任务规划,生成无人空中平台任务计划;
15.(7)通过仿真分析与动态演示,综合分析无人空中平台任务计划,验证飞行安全和任务可行性;
16.(8)验证无误的无人空中平台任务计划向上级发送,上级确认后下发各席位执行,否则返回步骤(6)重新进行任务规划。
17.其中,步骤(2)具体步骤如下:
18.(201)通过模拟蓝方执行任务或以蓝方任务目标为对象分析获得需无人空中平台构设威胁的区域及进入时间和持续时间,并综合考虑无人空中平台飞行能力,标识出为形成空中威胁,无人空中平台的获取区域及时间;
19.(202)根据蓝方任务模式,确定任务区域内需无人空中平台完成的任务模式,包括覆盖搜索、定点侦察和定点打击;
20.(203)根据蓝方工作模式,确定载荷对应工作模式;
21.(204)根据蓝方任务特点,通过查表和插值计算方法,计算出为达到任务效果,无人空中平台应保持的飞行高度、速度以及姿态方面的约束条件。
22.其中,步骤(6)中根据任务场景进行任务规划,生成无人空中平台任务计划,具体步骤如下:
23.(601)结合任务场景,根据无人空中平台起降机场和已分配的任务情况,计算无人空中平台概略航线,并结合地形,分析无人空中平台通信遮蔽情况,得到无人空中平台飞行走廊;
24.(602)制作无人空中平台飞行航线,通过人工编辑和自动计算,利用无人空中平台飞行走廊规划出无人空中平台飞行航线,在地图上显示无人空中平台全程飞行航线;
25.(603)制作载荷使用计划,包括开关机和工作模式,并根据之前模拟任务分析与分解中等效计算的结果,判定载荷使用计划的合理性;
26.(604)制作链路通信计划,结合无人空中平台飞行航线、地形数据、地面站部署情况,制定不同飞行阶段测控链路的使用计划,包括链路工作的调制方式、抗干扰方式、功率、编码方式和天线选择;
27.(605)对多个无人空中平台飞行航线、载荷使用计划和链路通信计划进行可行性及冲突检查,形成无人空中平台任务计划,未通过检查的任务规划结果重新调整任务分配,直至满足环境构设要求。
28.其中,步骤(7)具体步骤如下:
29.(701)启动仿真;
30.(702)对任务场景进行解析,确定仿真推演的时间节点及空间区域,同时确定目标位置信息、威胁区域信息和气象信息;
31.(703)将无人空中平台任务计划通过仿真时钟进行全过程的仿真推演,通过仿真解算进行飞行安全分析、通信分析、覆盖分析、卫星侦照分析和模拟精确制导武器效果分析,并基于高程、矢量和影像数据在地图上可视化展示;
32.(704)根据地图显示效果,进行仿真事件处理、无人空中平台任务计划关键事件提醒以及验证飞行安全和任务可行性;若满足任务执行则结束仿真。
33.本发明与背景技术相比具有如下优点:
34.1、本方法为无人空中平台规划出逼近蓝方对象的航线计划、载荷使用计划和通信设备使用计划,使得无人空中平台能够尽量在任务效果上接近蓝方对象,已达到训练目的。
35.2、本发明制作出不同无人空中平台之间互不冲突、互相协同的飞行计划,不再依靠任务区域划分和规划人员之间的协调来进行协同规划,大大减少了协调工作方面花费的大量人力和时间,同时满足任务过程中临机调整的需求。
36.3、本发明具备基于仿真引擎实现无人空中平台任务计划的动态演示,动态演示无人空中平台执行任务计划的全过程,及时发现任务计划的不足之处,从而改进和完善。
附图说明
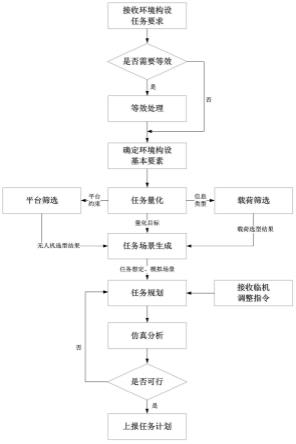
37.图1是本发明实施例中任务规划与推演流程图;
38.图2是本发明实施例中任务规划流程图;
39.图3是本发明实施例中仿真推演流程图。
具体实施方式
40.下面结合附图对本发明做进一步描述。
41.如图1所示,一种基于环境构设的无人空中平台任务规划与推演方法包括任务规划、重规划、等效分析、仿真分析与推演等过程。
42.当接收到上级下发的环境构设任务要求时,对任务要求进行分析,确定环境构设基本要素,需要模拟主要作战对手和想定威胁时还应进行等效处理,综合无人空中平台信息和任务载荷信息完成任务量化,把复杂的环境构设任务要求等效和分解成无人空中平台可执行的小任务,形成任务场景,然后进行任务规划,生成无人空中平台任务计划,通过仿真分析与动态演示,综合分析、验证飞行安全和任务可行性。验证无误的任务计划将向上级发送,确认后下发各席位执行,否则重新进行任务规划。
43.另外,在任务执行过程中,也能够根据接收的临机调整指令启动重规划。
44.具体包括以下步骤:
45.(1)接收上级下发的环境构设要求;
46.(2)若环境构设要求是蓝方模拟对象的任务,进行等效处理,将模拟对象的任务等效处理成无人空中平台可执行的任务;否则跳过该步骤执行步骤(3);其中蓝方模拟对象的任务包括模拟卫星侦察任务、模拟精确制导武器打击任务、模拟察打任务和模拟干扰任务;具体步骤如下:
47.(201)通过模拟蓝方执行任务或以蓝方任务目标为对象分析获得需无人空中平台构设威胁的区域及进入时间、持续时间等,并综合考虑无人空中平台飞行能力,标识出为形成空中威胁,无人空中平台的获取区域及时间;
48.(202)根据蓝方任务模式,确定任务区域内需无人空中平台完成的任务模式,如覆盖搜索、定点侦察、定点打击等;
49.(203)根据蓝方工作模式,确定载荷对应工作模式;
50.(204)根据蓝方任务特点,通过查表和插值计算等方法,计算出为达到任务效果,无人空中平台应保持的飞行高度、速度以及姿态方面的约束条件。
51.(3)对环境构设要求进行分析,确定模拟任务类型,对复杂模拟任务进行分析和分解,抽取出无人空中平台为达成特定任务效果所需活动的任务区域及时间要求、载荷使用要求和其它约束条件,其它约束条件包括速度和维度;
52.(4)根据步骤(3)抽取的要求和约束条件确定环境信息、预期效果和可用资源环境构设基本要素,并综合无人空中平台信息和任务载荷信息完成任务量化,进行无人空中平台和载荷筛选;
53.(5)根据无人空中平台选型结果和载荷选型结果,形成任务场景;
54.(6)根据任务场景进行任务规划,生成无人空中平台任务计划,并在任务执行过程中,接收到临机调整指令后重新根据任务场景进行任务规划,生成无人空中平台任务计划;
55.如图2所示,根据任务场景进行任务规划,生成无人空中平台任务计划,具体步骤如下:
56.(601)结合任务场景,根据无人空中平台起降机场和已分配的任务情况,计算无人空中平台概略航线,并结合地形,分析无人空中平台通信遮蔽情况,得到无人空中平台飞行走廊;
57.(602)制作无人空中平台飞行航线,通过人工编辑和自动计算,利用无人空中平台飞行走廊规划出无人空中平台飞行航线,在地图上显示无人空中平台全程飞行航线;
58.(603)制作载荷使用计划,包括开关机和工作模式,并根据之前模拟任务分析与分解中等效计算的结果,判定载荷使用计划的合理性;
59.(604)制作链路通信计划,结合无人空中平台飞行航线、地形数据和地面站部署情况,制定不同飞行阶段测控链路的使用计划,包括链路工作的调制方式、抗干扰方式、功率、编码方式和天线选择;
60.(605)对多个无人空中平台飞行航线、载荷使用计划和链路通信计划进行可行性及冲突检查,形成无人空中平台任务计划,未通过检查的任务规划结果重新调整任务分配,直至满足环境构设要求。
61.(7)通过仿真分析与动态演示,综合分析无人空中平台任务计划,验证飞行安全和任务可行性;
62.如图3所示,具体步骤如下:
63.(701)启动仿真;
64.(702)对任务场景进行解析,确定仿真推演的时间节点及空间区域,同时确定目标位置信息、威胁区域信息和气象信息;
65.(703)将无人空中平台任务计划通过仿真时钟进行全过程的仿真推演,通过仿真解算进行飞行安全分析、通信分析、覆盖分析、卫星侦照分析和模拟精确制导武器效果分析,并基于高程、矢量和影像数据在地图上可视化展示;
66.(704)根据地图显示效果,进行仿真事件处理、无人空中平台任务计划关键事件提醒以及验证飞行安全和任务可行性;若满足任务执行则结束仿真。
67.(8)验证无误的无人空中平台任务计划向上级发送,上级确认后下发各席位执行,否则返回步骤(6)重新进行务规划任。
68.总之,本发明提出了一种基于环境构设的无人空中平台任务规划与推演方法。该方法把复杂的环境构设任务要求等效和分解成无人空中平台可执行的小任务,进而对无人
空中平台进行航线、载荷、链路通信等任务规划,生成无人空中平台任务计划,通过仿真分析与动态演示,综合分析、验证飞行安全和任务可行性。适用于蓝方训练环境构设场景,也可以应用到其他场景的任务规划与推演领域。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。