1.本发明属于无人机自主定位领域,特别涉及一种基于语义地图的无人机城市内自主定位方法,用于实现gnss拒止条件下的无人机自主定位。
背景技术:
2.高效精准的定位系统是无人机能否成功执行任务的重要影响因素。目前常用的无人机定位技术多为卫星导航定位技术(gnss)与惯性导航技术(imu)相组合的导航方式。但gnss信号通常易受到干扰被恶意损坏,对gnss信号过度依赖会导致无人机定位导航的可靠性和安全性降低。若失去gnss信号的支持,单一的惯性导航方式由于自身的器件属性会在定位过程产生误差累积,无人机仅依靠惯性导航系统无法实现长航时飞行过程中的精确定位。
3.目前最广泛应用的室外无人机自主定位方法时基于异源图像匹配的视觉定位,即以高分辨率遥感图像为底图,将无人机拍摄的图像配准到底图上,进行无人机图像定位,并最终实现无人机定位。这一类方法由于成像时间的差异、光照的差异、图像分辨率的差异等导致匹配精度难以满足甚至无法匹配,尤其是当无人机飞行高度很低时,无法进行无人机定位;此外,由于高分辨率遥感图像数据量大,直接对图像进行特征提取与匹配,计算量大,难以进行大范围的无人机自主定位。
4.为了提升无人机自主定位精度,同时提升定位效率,本发明从人类识别陌生地点的方式出发,提出了一种基于语义地图的无人机城市内自主定位方法。
技术实现要素:
5.本发明的目的在于解决室外无人机在丢失gnss信号下无法进行自主定位的问题,提出了一种基于语义地图的无人机城市内自主定位方法,利用多源地理信息数据构建语义地图,利用无人机图像自动识别语义要素,与语义地图进行匹配,以实现无人机自主定位。
6.为了实现上述目的,本发明采用的技术方案如下:
7.一种基于语义地图的无人机城市内自主定位方法,包括以下步骤:
8.(1)获取高空无人机自主定位需求数据以及各个地物的经纬度信息和属性信息,获取低空无人机自主定位需求数据以及各个点位的经纬度信息和名称,构建语义地图;其中,高空无人机自主定位需求数据包括建筑轮廓数据、篮球场轮廓数据、足球场轮廓、水体轮廓数据、道路数据、大面积草地轮廓数据和大面积林地轮廓数据,低空无人机自主定位需求数据包括poi点位数据和道路标志牌点位数据;
9.(2)针对高空无人机,利用人工智能算法,从无人机拍摄的图像中提取建筑、篮球场、足球场、水体、道路、草地和林地信息;针对低空无人机,利用人工智能算法从无人机拍摄的图像中区分出单个的标志牌和路牌,并识别标志牌文字和路牌文字;
10.(3)针对中高空无人机,利用空间场景检索算法,将提取出的建筑、篮球场、足球场、水体、道路、草地和林地轮廓与语义地图进行匹配,匹配过程考虑不同语义斑块间的拓
扑关系和距离关系,匹配成功的场景即为无人机图像成像场景,场景的地理位置即无人机成像场景位置;针对低空无人机,利用提取到的单个标志牌或路牌的文字与语义地图中的poi点位数据和道路标志牌点位数据进行相关性检索,检索到的poi或道路标志牌位置即为无人机成像场景位置;
11.(4)返回步骤(2),获取其他场景下的无人机成像场景位置,并计算场景位置间的空间距离,并以无人机运动时间估算无人机的运动距离范围,若场景位置间的空间距离在无人机的运动距离范围内,则利用语义信息定位的无人机成像场景位置是正确的。
12.进一步的,步骤(1)中高空无人机自主定位需求数据以面shapefile文件存储,低空无人机自主定位需求数据以点shapefile文件存储。
13.本发明与背景技术相比具有如下优点:
14.1.本发明提出的一种基于语义地图的无人机城市内自主定位方法,以建筑轮廓数据、篮球场轮廓数据、足球场轮廓、水体轮廓数据、道路数据、大面积草地轮廓数据、大面积林地轮廓数据、poi点位数据、道路标志牌点位数据作为语义地图,具有城市内广泛分布,且易于从图像中高精度提取的特点。
15.2.本发明提出的一种基于语义地图的无人机城市内自主定位方法,以点shapefile文件、面shapefile文件存储语义地图,数据量小,易于计算。
16.3.本发明提出的一种基于语义地图的无人机城市内自主定位框架,能够同时满足低空和中高空无人机自主定位的需求。
附图说明
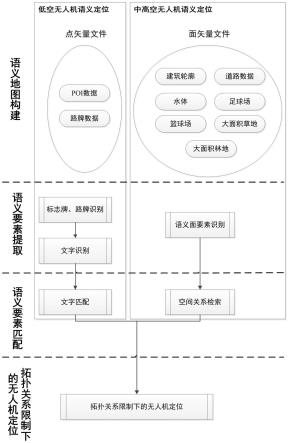
17.图1是本发明一种基于语义地图的无人机城市内自主定位方法原理图。
具体实施方式
18.下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
19.图1是本发明一种基于语义地图的无人机城市内自主定位方法具体实施下的原理框架图。
20.在本实施例中,如图1所示一种基于语义地图的无人机城市内自主定位方法包括语义地图构建、无人机图像语义要素提取、语义要素匹配和拓扑关系限制下的无人机定位四个步骤。具体步骤如下:
21.(1)语义地图构建,为满足中高空无人机自主定位需求,语义地图中需要包含建筑轮廓数据、篮球场轮廓数据、足球场轮廓、水体轮廓数据、道路数据、大面积草地轮廓数据、大面积林地轮廓数据,以面shapefile文件存储,记录各个地物的经纬度信息和属性信息;为满足低空无人机自主定位需求,语义地图中需要包含poi点位数据和道路标志牌点位数据,以点shapefile文件存储,记录各个点位的经纬度信息和名称等属性信息。
22.(2)无人机图像语义要素提取,针对中高空无人机,利用人工智能算法,从无人机拍摄的图像中提取建筑、篮球场、足球场、水体、道路、草地和林地信息;针对低空无人机,利用人工智能算法从无人机拍摄的图像中首先区分出单个的标志牌和路牌,然后识别标志牌
文字和路牌文字。
23.(3)语义要素匹配,针对中高空无人机,利用空间场景检索算法,将提取出的建筑、篮球场、足球场、水体、道路、草地和林地轮廓与语义地图进行匹配,匹配过程考虑不同语义斑块间的拓扑关系和距离关系,匹配成功的场景即为无人机图像成像场景,该场景的地理位置即无人机成像场景位置;针对低空无人机,利用提取到的单个标志牌或路牌的文字与语义地图中的poi点位数据和道路标志牌点位数据进行相关性检索,检索到的poi或道路路牌位置即为无人机成像场景位置。
24.(4)拓扑关系限制下的无人机定位,返回步骤(2),获取其他场景下的无人机成像场景位置,即考虑到单一场景下的语义要素匹配可能存在误差,所以使用多个场景进行匹配,并计算场景位置间的空间距离,最后以无人机运动时间估算无人机的运动距离范围,若场景间位置的空间距离在无人机的运动距离范围内,则认为利用语义信息定位的无人机成像场景位置是正确的。
25.本发明实现一种基于语义地图的无人机城市内自主定位框架,该框架包括语义地图构建、无人机图像语义要素提取、语义要素匹配和拓扑关系限制下的无人机定位四个步骤。语义地图构建过程中考虑无人机不同飞行高度条件下的观测对象,通过寻找在城市中普遍存在且能够高精度提取的要素作为语义地图要素;针对低空无人机,从无人机图像中识别标志牌、路标即其上的文字,针对中高空无人机,从无人机图像中识别其他语义地图中的面状语义要素;针对低空无人机,将识别到的文字与poi或路牌文字进行匹配,针对高空无人机,从语义地图中检索出提取到的局部空间场景,匹配成功即意味着检索到了无人机成像区域的地理位置;最后,考虑到单一场景匹配可能存在误差,使用拓扑关系对多个无人机场景的定位进行确认,最后确定无人机的精确位置。本发明相较于传统基于图像匹配的无人机定位,提出了一种基于语义地图的无人机城市内自主定位方案,计算量小、准确率高,且同时能够满足高中低空无人机的自主定位。
26.尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。