1.本发明涉及医疗器械技术领域,具体而言,涉及一种抓取机构、传输系统以及自动分析系统。
背景技术:
2.目前,现有技术中的抓取机构一般包括夹持电机和夹抓,夹持电机驱动夹抓运动以使夹抓处于夹取状态或松开状态,从而在夹取状态时实现对待夹取件的夹取,在松开状态时实现对待夹取件的松开。
3.然而,现有技术中的这种抓取机构往往结构复杂,夹抓的制造成本较高,且往往需要根据不同的待夹取件制备不同的夹抓,因而往往使得抓取机构的整体制造成本较高。
技术实现要素:
4.本发明的主要目的在于提供一种抓取机构、传输系统以及自动分析系统,以解决现有技术中的抓取机构的制造成本较高的技术问题。
5.为了实现上述目的,根据本发明的一个方面,提供了一种抓取机构,包括:环形带,包括依次连接的第一驱动段、第一套设段、第二驱动段和第二套设段,第一套设段与第二套设段相对设置;驱动结构,包括第一驱动件、第二驱动件以及与第一驱动件和第二驱动件均连接的驱动主体,第一驱动段绕设在第一驱动件上,第二驱动段绕设在第二驱动件上;限位组件,包括位于环形带的外侧的第一限位部和第二限位部;第一限位部具有第一限位间隙,第一驱动段限位在第一限位间隙内;第二限位部具有第二限位间隙,第二驱动段限位在第二限位间隙内;其中,驱动主体可转动地设置,以在驱动主体转动时通过第一驱动件带动第一驱动段运动、通过第二驱动件带动第二驱动段运动,并在第一限位部和第二限位部的限位作用下使第一套设段和第二套设段围成抓取孔。
6.进一步地,第一限位部包括间隔设置的第一限位凸起和第二限位凸起,第一限位凸起和第二限位凸起之间的间隙形成第一限位间隙,第一驱动段穿过第一限位间隙绕设在第一驱动件上;第二限位部间隔设置的第三限位凸起和第四限位凸起,第三限位凸起和第四限位凸起之间的间隙形成第二限位间隙,第二驱动段穿过第二限位间隙绕设在第二驱动件上。
7.进一步地,环形带的内侧设置有第二配合结构,第二配合结构位于抓取孔内,以在抓取孔进行抓取时通过第二配合结构进行配合;和/或,环形带由嵌设有金属丝或尼龙丝的橡胶件或塑料制成。
8.进一步地,限位组件还包括限位主体,第一限位部和第二限位部均安装在限位主体上;限位组件具有启动扭转力矩,以在作用于第一限位部和第二限位部上的力矩小于或等于启动扭转力矩时,通过驱动结构驱动第一驱动段和第二驱动段运动并使将第一套设段和第二套设段围成抓取孔;或者在作用于第一限位部和第二限位部上的力矩大于启动扭转力矩时,通过驱动结构带动限位组件和环形带同步运动。
9.进一步地,限位主体上间隔设置有多个沿弧形方向间隔设置的第一限位配合部,抓取机构还包括:弹性限位结构,弹性限位结构具有相互连接的弹性部和第二限位配合部,第二限位配合部与第一限位配合部相适配地设置;其中,当作用于第一限位部和第二限位部上的力矩小于或等于启动扭转力矩时,第一限位配合部受到第二限位配合部的限位作用而保持静止;当作用于第一限位部和第二限位部的力矩大于启动扭转力矩时,第一限位配合部将相对第二限位部进行转动。
10.进一步地,限位主体包括:限位套筒,驱动主体和环形带均安装在限位套筒内,第一限位配合部设置在限位套筒的一端;限位端板,设置在限位套筒的另一端,第一限位部和第二限位部均安装在限位端板上,限位端板上设置有套设通孔,套设通孔与环形带的内圈相对设置,套设通孔与抓取孔的形状相适配。
11.进一步地,驱动结构还包括驱动电机;抓取机构还包括:固定套筒,驱动电机的电机轴设置在固定套筒内,驱动主体的至少部分设置在固定套筒内,电机轴与驱动主体的至少部分连接;轴承,安装在固定套筒上,限位套筒通过轴承安装在固定套筒上。
12.进一步地,抓取机构还包括:第一检测结构,第一检测结构的检测头朝向限位主体设置,第一检测结构用于检测限位主体的转动角度;和/或,第二检测结构,第二检测结构的检测头朝向环形带设置。
13.根据本发明的另一方面,提供了一种传输系统,包括上述提供的抓取机构。
14.根据本发明的另一方面,提供了一种自动分析系统,包括上述提供的抓取机构。
15.应用本发明的技术方案,在抓取或松开时,只需要使驱动主体沿不同的方向进行转动。具体在抓取时,驱动主体沿第一预设方向转动,并通过第一驱动件带动第一驱动段运动、通过第二驱动件带动第二驱动段运动,并使第一限位间隙内的第一驱动段在第一限位部的限位作用下进行抵接扭转、第二限位间隙内的第二驱动段在第二限位部的限位作用下进行抵接扭转,从而使得第一套设段和第二套设段向里缩紧并逐步围成具有一定抓取力的抓取孔实现抓取,环形带结构简单,制造成本较低,有效降低了抓取机构的制造成本。进一步地,在通过第一套设段和第二套设段围成的抓取孔实现对待抓取件的抓取后,在驱动主体的进一步驱动作用下还能够带动第一套设段和第二套设段运动,并使第一套设段和第二套设段的旋转力作用于待抓取件的盖体部上,以实现对待抓取件的盖体部的拧紧或松开。
附图说明
16.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
17.图1示出了根据本发明的实施例提供的抓取机构的驱动件未转动时环形带与待抓取件的结构示意图;
18.图2示出了根据本发明的实施例提供的抓取机构的驱动件沿第一预设方向转动时环形带与待抓取件的结构示意图;
19.图3示出了根据本发明的实施例提供的抓取机构的驱动件沿第二预设方向转动时环形带与待抓取件的结构示意图;
20.图4示出了根据本发明的实施例提供的抓取机构的剖视图;
21.图5示出了根据本发明的实施例提供的抓取机构的爆炸图;
22.图6示出了根据本发明的实施例提供的抓取机构的结构示意图;
23.图7示出了根据本发明的实施例提供的抓取机构的安装示意图。
24.其中,上述附图包括以下附图标记:
25.10、环形带;11、第一驱动段;12、第一套设段;13、第二驱动段;14、第二套设段;15、第二配合结构;
26.20、驱动结构;21、第一驱动件;22、第二驱动件;23、驱动主体;231、连接柱;232、驱动板;24、驱动电机;
27.30、限位组件;31、第一限位部;311、第一限位凸起;312、第二限位凸起;32、第二限位部;321、第三限位凸起;322、第四限位凸起;33、限位主体;331、第一限位配合部;332、限位套筒;333、限位端板;3331、套设通孔;
28.40、弹性限位结构;41、弹性部;42、第二限位配合部;
29.50、固定套筒;
30.60、轴承;
31.70、第一检测结构;71、光电开关;72、开关挡片;
32.80、待抓取件;81、主体部;82、盖体部;
33.91、外挡圈;92、内挡圈;
34.100、固定板;
35.110、支架;
36.120、运输带;
37.130、固定座。
具体实施方式
38.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
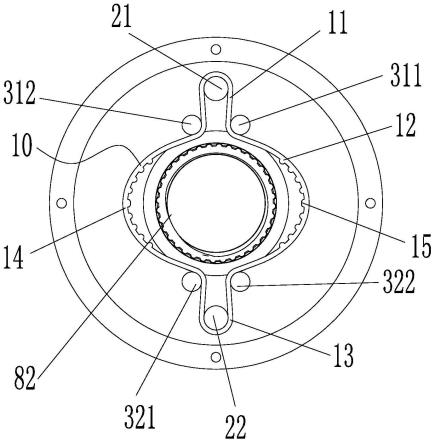
39.如图1至图7所示,本发明的实施例一提供了一种抓取机构,该抓取机构包括环形带10、驱动结构20和限位组件30,环形带10包括依次连接的第一驱动段11、第一套设段12、第二驱动段13和第二套设段14,第一套设段12与第二套设段14相对设置。驱动结构20包括第一驱动件21、第二驱动件22以及与第一驱动件21和第二驱动件22均连接的驱动主体23,第一驱动段11绕设在第一驱动件21上,第二驱动段13绕设在第二驱动件22上。限位组件30包括位于环形带10的外侧的第一限位部31和第二限位部32;第一限位部31具有第一限位间隙,第一驱动段11限位在第一限位间隙内;第二限位部32具有第二限位间隙,第二驱动段13限位在第二限位间隙内。其中,驱动主体23可转动地设置,以在驱动主体23转动时通过第一驱动件21带动第一驱动段11运动、通过第二驱动件22带动第二驱动段13运动,并在第一限位部31和第二限位部32的限位作用下使第一套设段12和第二套设段14围成抓取孔。
40.采用本实施例提供的抓取机构,在抓取或松开时,只需要使驱动主体23沿不同的方向进行转动即可。具体在抓取时,驱动主体23沿第一预设方向转动,并通过第一驱动件21带动第一驱动段11运动、通过第二驱动件22带动第二驱动段13运动,并使第一限位间隙内的第一驱动段11在第一限位部31的限位作用下进行抵接扭转、第二限位间隙内的第二驱动段13在第二限位部32的限位作用下进行抵接扭转,从而使得第一套设段12和第二套设段14
向里缩紧并逐步围成具有一定抓取力的抓取孔,以通过该抓取孔有效实现抓取。在松开时,驱动主体23沿第二预设方向转动,第二预设方向与第一预设方向为相反方向,第一驱动件21带动第一驱动段11运动、第二驱动件22带动第二驱动段13运动,以使第一套设段12和第二套设段14向外松开,从而实现对待抓取件80的松开过程。采用本实施例提供的抓取机构,仅仅需要通过驱动结构20对环形带10进行驱动以及限位组件30的限位配合,对环形带10的适应性操作即可实现抓取和公开,环形带10的结构简单,制造成本较低,从而能够有效降低抓取机构的整体制造成本。因此,采用本实施例提供的抓取机构,能够解决现有技术中的抓取机构的制造成本较高的技术问题。
41.具体地,在抓取时,第一套设段12和第二套设段14用于套设在待抓取件80上,并通过第一套设段12和第二套设段14对待抓取件80进行包裹抓取。
42.在本实施例中,第一限位部31包括间隔设置的第一限位凸起311和第二限位凸起312,第一限位凸起311和第二限位凸起312之间的间隙形成第一限位间隙,第一驱动段11穿过第一限位间隙绕设在第一驱动件21上;第二限位部32间隔设置的第三限位凸起321和第四限位凸起322,第三限位凸起321和第四限位凸起322之间的间隙形成第二限位间隙,第二驱动段13穿过第二限位间隙绕设在第二驱动件22上。采用这样的结构设置,能够便于通过第一限位凸起311和第三限位凸起321的配合实现对待抓取件80的抓取,或者通过第二限位凸起312和第四限位凸起322的配合实现对待抓取件80的抓取。此外,限位凸起的结构简单,限位作用可靠,能够便于对第一驱动段11和第二驱动段13进行稳定限位,以便于使第一套设段12和第二套设段14能够稳定地形成具有一定抓取力的抓取孔,从而提高包裹抓取的稳定性。
43.具体地,第一限位凸起311、第二限位凸起312、第三限位凸起321和第四限位凸起322均可以设置为多个,多个第一限位凸起311与多个第二限位凸起312一一对应地设置,各个第一限位凸起311与相应的第二限位凸起312间隔设置并形成对应的第一限位间隙;多个第三限位凸起321与多个第四限位凸起322一一对应地设置,各个第三限位凸起321与相应的第四限位凸起322间隔设置并形成对应的第二限位间隙。通过设置多个第一限位凸起311、多个第二限位凸起312、多个第三限位凸起321和多个第四限位凸起322,能够便于对第一驱动段11和第二驱动段13形成稳定的限位,以使第一驱动段11和第二驱动段13稳定地进行抵接扭转,从而便于保证抓取的稳定性。
44.在本实施例中,限位组件30还包括限位主体33,第一限位部31和第二限位部32均安装在限位主体33上;限位组件30具有启动扭转力矩,以在作用于第一限位部31和第二限位部32上的力矩小于或等于启动扭转力矩时,通过驱动结构20驱动第一驱动段11和第二驱动段13运动并使将第一套设段12和第二套设段14围成抓取孔;或者在作用于第一限位部31和第二限位部32上的力矩大于启动扭转力矩时,通过驱动结构20带动限位组件30和环形带10同步运动,并实现对待抓区间的至少部分的旋转。采用这样的结构设置,能够便于将待抓取件80的至少部分从待抓取件80的主体部上旋紧或旋松,从而在抓取之后还能够实现旋紧和旋松操作,此外,整个操作过程也只需要对限位主体进行驱动即可,因而也只需要一个驱动电机进行驱动,从而也简化了结构,降低了抓取组件的整体成本。
45.具体地,待抓取件80包括主体部81和盖体部82,盖体部82上设置有第一配合结构。环形带10上设置有与第一配合结构相适配的第二配合结构15,以在第一配合结构和第二配
合结构15的配合作用下实现对盖体部82的合盖操作和开盖操作。采用这样的结构设置,能够便于更好地对盖体部82进行合盖操作和开盖操作,提高操作的快捷性。具体地,在第一驱动段11和第二驱动段13的内侧设置有第二配合结构15,以提高对盖体部82的操作便捷性。可以使得第一套设段12和第二套设段14内侧为光滑面结构。
46.本实施例中,通过第一限位凸起311和第三限位凸起321的配合、第二限位凸起312和第四限位凸起322的配合可以分别实现对盖体部82的合盖操作和开盖操作。
47.具体地,第一配合结构可以包括沿盖体的周缘环形布局的多个第一齿形结构,第二配合结构15为与第一齿形结构相适配的第二齿形结构。具体地,可以在环形带10上设置有两个齿形段,两个齿形段上均设置有第二齿形结构,两个齿形段相对设置,以在驱动主体23运动时带动两个齿形段对盖体部82进行包裹,进而便于进行旋转操作。
48.在本实施例中,限位主体33上间隔设置有多个沿弧形方向间隔设置的第一限位配合部331,抓取机构还包括弹性限位结构40,弹性限位结构40具有相互连接的弹性部41和第二限位配合部42,第二限位配合部42与第一限位配合部331相适配地设置。其中,当作用于第一限位部31和第二限位部32上的力矩小于或等于启动扭转力矩时,第一限位配合部331受到第二限位配合部42的限位作用而保持静止;当作用于第一限位部31和第二限位部32的力矩大于启动扭转力矩时,第一限位配合部331将相对第二限位部32进行转动。采用这样的结构设置,通过弹性限位结构40与第一限位配合部331的配合能够实现根据启动扭转力矩的大小分别实现抓取和开盖或合盖操作,结构简单,便于实现。
49.具体地,第一限位配合部331可以为多个间隔设置的限位齿结构。第二限位配合部42位与相邻两个限位齿之间的间隙配合的限位销,弹性部41可以为弹簧。或者,弹性限位结构40可以为扭矩限制弹簧塞,弹簧塞的端部形成与相邻两个限位齿之间的间隙配合的柱销头。
50.在本实施例中,限位主体33包括限位套筒332和限位端板333,驱动主体23和环形带10均安装在限位套筒332内,第一限位配合部331设置在限位套筒332的一端。限位端板333设置在限位套筒332的另一端,第一限位部31和第二限位部32均安装在限位端板333上,限位端板333上设置有套设通孔3331,套设通孔3331与环形带10的内圈相对设置,套设通孔3331与抓取孔的形状相适配,抓取孔的形状与待抓取件80的外形相适配。采用这样的结构设置,能够便于优化抓取机构的结构布局,提高抓取机构的布局紧凑性。
51.具体地,本实施例中驱动结构20还包括驱动电机24;抓取机构还包括固定套筒50和轴承60,驱动电机24的电机轴设置在固定套筒50内,驱动主体23的至少部分设置在固定套筒50内,电机轴与驱动主体23的至少部分连接;轴承60安装在固定套筒50上,限位套筒332通过轴承60安装在固定套筒50上。采用这样的结构设置,只需要通过一个驱动电机24便能够顺利带动环形带10实现抓取和开盖或合盖的操作;同时通过将轴承60按照上述方式进行设置,进一步提高了布局的紧凑性,也便于使得限位套筒332能够在超过启动扭转力矩时顺利转动。
52.在本实施例中,抓取机构还包括第一检测结构70,第一检测结构70的检测头朝向限位主体33设置,第一检测结构70用于检测限位主体33的转动角度。采用这样的结构设置,便于判断操作完毕之后限位主体33是否恢复至初始状态,从而便于后续进行相应的控制。具体地,本实施例中的第一检测接结构包括光电开关71和开关挡片72,开关挡片72固定安
装在限位主体33上,光电开关71上设置有与开关挡片72相适配的通过槽,当限位主体33带动开关挡片72运动至通过槽时,光电开关71接受对应的信号。
53.具体地,抓取机构还包括第二检测结构,第二检测结构的检测头朝向环形带10设置,第二检测结构用于检测环形带10处是否有待抓取件80。采用这样的设置,能够便于根据检测环形带10处是否有待抓取件80进行适应性的控制,并通过抓取机构的控制件控制驱动结构20进行相应的运动。需要说明的是“环形带10处”包括靠近环形带10的位置处以及环形带10的正下方位置处。
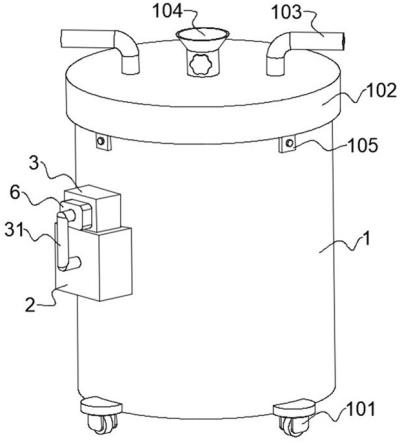
54.如图7所示,将抓取机构整体可升降地设置在支架110上,当检测到环形带10下方有采样管时,控制抓取机构进行下降并对采样管的盖体进行对应的操作。具体地,将采样管固定在固定座130上,固定座130上设置有限位孔,并通过运输带120进行运输。在具体工作过程中,运输带120运动以带动采样管在前后方向移动,当检测到一个采样管运动至环形带10的正下方时,抓取机构整体下降至使环形带10套设在采样管处,随后通过驱动结构20对环形带10的驱动并在限位组件30的配合下实现对采样管的盖体的抓取拧紧合盖或抓取拧开开盖操作,随后,抓取机构整体上升,运输带120继续进行运输,直至下下一个采样管运动至环形带10的正下方后,重复上述操作。
55.在本实施例中,抓取机构还包括固定板100,驱动电机24、固定套筒50分别安装在固定板100的两侧,驱动电机24的电机轴穿过固定板100上的通孔与位于固定板100另一侧的驱动主体23进行连接。驱动主体23包括连接柱231和驱动板232,连接柱231安装在固定套筒50内并与电机轴连接,驱动板232设置在固定套筒50外,第一驱动件21和第二驱动件22均凸出于驱动板232设置。具体地,本实施例中的待抓取件80主要为采样管。
56.具体地,环形带10由嵌设有金属丝或尼龙丝的橡胶件制成,或环形带10由嵌设有金属丝或尼龙丝的塑料制成,这样既能够保证环形带10的结构强度,又能够使得环形带10能够发生一定的形变量,保证环形带10具有一定的韧性。
57.如图4和图5所示,本实施例中的抓取机构弹性限位结构40固定在固定板100上,固定套筒50固定在固定板100上,驱动电机24也固定在固定板100上,驱动电机24的主体部81和固定套筒50分别安装在固定板100的两侧。驱动主体23与穿过固定板100、固定套筒50和轴承60的驱动电机24的电机轴(即为输出轴)固定连接,驱动主体23上设置有至少两个限位结构。限位套筒332内设有可将轴承60限制在其内的外挡圈91,限位套筒332的上表面设有可与弹性限位结构40抵接的第一限位配合部331。
58.本实施例中,弹性限位结构40可以为扭矩限制弹簧塞,扭矩限制弹簧塞可替代为与弹簧一端连接的销,扭矩限制弹簧塞一端为柱销头。具体地,固定套筒50为轴承60固定套,固定套筒50处还设置有内挡圈92,以对轴承60进行限位。本实施例中,第一限位凸起311、第二限位凸起312、第三限位凸起321和第四限位凸起322均可以设置为柱体结构。本实施例中驱动电机24可以为可使得输出轴旋转的电机,第一限位配合部331可以为为扭矩限制齿。限位端板333固定在限位套筒332的底部,限位端板333上设有错位设置的第一限位凸起311和第三限位凸起321以及第二限位凸起312和第四限位凸起322,第一限位凸起311与第四限位凸起322对称布置,第二限位凸起312与第三限位凸起321对称布置。环形带10的内表面设置有齿状结构,环形带10套设在第一驱动件21和第二驱动件22上,环形带10的外表面与第一限位部31和第二限位部32抵接。
59.如图4所示,弹性限位结构40轴向可调节地安装在固定板100上,并且弹性限位结构40端部的柱销头与第一限位配合部331的扭矩限制齿配合。因此通过调节弹性限位结构40与扭矩限制齿的轴向配合尺寸可以调节限位套筒332的可转动扭矩。即,外界驱动扭矩小于该可转动扭矩(对应为启动扭转力矩)时限位套筒332保持静止,外界驱动扭矩大于该可转动扭矩时限位套筒332开始转动。
60.本实施例中的环形带10具有一定的韧性,材质可以是镶嵌金属丝或尼龙丝的pu或橡胶。环形带10的内侧可以设置有有两段有齿,齿间距与采样管的管盖圆周的齿形及齿间距相当,有齿的部分相对称,其余部分为光面。
61.如图1所示,当第一驱动件21位于第一限位凸起311和第二限位凸起312的中间位置、第二驱动件22位于第三限位凸起321和第四限位凸起322的中间位置时,在限位套筒332的内壁和限位组件30的的挤压作用下,环形带10中间向限位套筒332的内壁凸起,中间孔增大。此时可以将采样管的管盖穿过限位端板333中间套设通孔3331深入到环形带10的中间孔位置,具体地,套设通孔3331可以为圆形孔。
62.如图2所示,当驱动主体23从图1中的位置开始沿第一预设方向旋转时,在第一驱动件21的拉伸作用和第二限位凸起312的限制作用下以及第二驱动件22的拉伸作用和第三限位凸起321的限制作用下,环形带10的中间孔会逐渐缩小并最终包裹住采样管的管盖。当驱动主体23继续旋转时,转动力矩会大于限位套筒332的可转动扭矩,从而带动采样管的管盖做旋转运动,实现采样管的开盖。
63.如图3所示,当驱动主体23从图1中的位置开始沿第二预设方向旋转时,在第一驱动件21的拉伸作用和第一限位凸起311的限制作用下以及第二驱动件22的拉伸作用和第四限位凸起322的限制作用下,环形带10的中间孔同样会逐渐缩小并最终包裹住采样管盖。当驱动主体23继续旋转时,转动力矩会大于限位套筒332的可转动扭矩,从而带动采样管的管盖做旋转运动,实现采样管的合盖。
64.本发明的实施例二提供了一种传输系统,传输系统包括进样组件、扫描组件、抓取机构和回收组件,进样组件用于对待抓取件80进行传送;扫描组件用于对待抓取件80进行扫描,抓取机构为上述提供的抓取机构,抓取机构用于对待抓取件80进行抓取;回收组件设置在进样组件的下游,回收组件用于对待抓取件80进行回收。采用这样系统,能够便于顺利对待抓取件80进行传输和扫描。具体地,待抓取件80主要为采样管。
65.本发明的实施例三提供了一种自动分析系统,自动分析系统包括进样模块、反应容器加载模块和孵育模块、检测模块和判读模块,进样模块包括上述提供的待抓取件80,反应容器加载模块用于将待抓取件80加载至孵育模块上;检测模块用于对待抓取件80进行检测,判读模块用于对检测模块的检测结果进行分析。采用这样的系统,能够便于实现对待抓取件80的自动分析和检测过程,提高了自动化程度。具体地,待抓取件80主要为采样管。
66.本实施例中的孵育模块还具有储存功能,检测模块包括化学发光检测件,判读模块可以进行多重判读。本实施例中的自动分析系统还包括移液模块、洗涤模块、反应容器弃置模块以及控制模块,并通过控制模块控制上述多个模块的配合运行。
67.从以上的描述中,可以看出,本发明上述的实施例实现了如下技术效果:仅通过一个驱动电机就可实现市面上的抓取旋转机构的抓取旋转功能,较市面上的抓取旋转机构包括用于反应管夹持的夹持组件和用于为夹持组件提供旋转动力的旋转组件,且夹持组件通
过丝杆电机提供动力,旋转组件通过旋转电机提供动力,本实施例提出的抓取机构,仅通过一个旋转电机就可实现市面上的抓取旋转机构的抓取旋转功能,成本更低。
68.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
69.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
70.在本技术的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
71.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
72.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本技术保护范围的限制。
73.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。