技术特征:
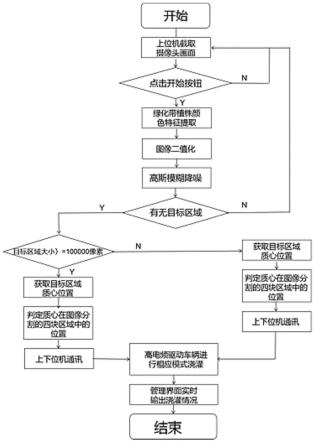
1.一种基于图像处理的道路绿化带自动浇灌方法,其特征在于,包括:图像采集步骤:由浇灌车上的拍摄图像,并由上位机截取摄像头画面;图像处理步骤:提取画面中绿化带植株颜色特征,并依次进行图像二值化、高斯模糊降噪处理;目标区域识别步骤:对经过处理后的图像判断有无目标区域,若没有,返回图像采集步骤,若有,则进入目标区域大小步骤;目标区域大小步骤:判断目标区域大小是否大于等于100000像素;执行步骤:目标区域大小判断完成后,通过高电频驱动浇灌车辆进行相应模式浇灌,由管理界面实时输出浇灌情况。2.根据权利要求1所述的基于图像处理的道路绿化带自动浇灌方法,其特征在于,所述目标区域大小步骤具体包括:判断目标区域大小是否大于等于100000像素;若大于,则获取目标区域质心位置,判定质心在图像分割的四块区域中的位置,灌溉车运行时需要对不同位置质心进行跟踪,然后进行上位机与下位机的通信。3.根据权利要求2所述的基于图像处理的道路绿化带自动浇灌方法,其特征在于,所述上位机与下位机的通信包括:将识别到的绿色图像质心区域分为四块,将摄像头分辨率设置为640*480,故据此质心所在区域分为水平0~320,竖直240~480;水平0~320,竖直0~240;水平320~640,竖直240~480;水平320~640,竖直0~240这四种情况;定义四个函数,根据四种质心位置区间,上位机程序在循环结构中不断判断质心所处位置在a/b/c/d区域,向下位机发送四种不同的串口信号,再由下位机引脚输出驱动信号,经放大电路驱动浇灌车内的水泵与浇灌臂舵机,进行四种模式不同角度的转动。4.根据权利要求3所述的基于图像处理的道路绿化带自动浇灌方法,其特征在于,所述上位机对质心位置判断后由串口通讯驱动下位机,从而实现对绿植的主要所在区域进行定位的来回喷灌,在下位机程序横向来回浇灌的基础上增添纵向25度的来回浇灌;进行质心位置处于水平0~320,竖直0~240;水平320~640,竖直0~240两种情况的浇灌时,将纵轴角度最小值设置为水平向上30度。5.根据权利要求3所述的基于图像处理的道路绿化带自动浇灌方法,其特征在于,在上位机中加入绿植面积判断功能,当识别到的绿色像素点多于100000个时,舵机进行对该角度范围多量喷灌,其中,底部舵机转动四次,水泵马达转速最高;反之,绿色像素点小于100000时,舵机则进行较少量喷灌,此时,底部舵机转动次数、水泵马达转速为多量情况的一半。6.根据权利要求1所述的基于图像处理的道路绿化带自动浇灌方法,其特征在于,所述图像处理步骤中提取画面中绿化带植株颜色特征,通过识别植物颜色,对绿化带进行浇灌,运用matplotlib库将图像中不同颜色区域的rgb值以及由其转换后的hsv值提取出来,并进行颜色直方图比较;得到所需要检测的三种颜色的合适hsv分度值范围后,通过在图像中找绿色像素点的方式设计算法,将除绿色像素点外的像素全部转化为黑色像素点;再由opencv库中的灰度化、二值化函数,将绿色像素点转化为白色像素点;再通过质心计算公式,将所有白色像素点的中心求取,即原先绿颜色所在的主要位置的中心。
7.根据权利要求6所述的基于图像处理的道路绿化带自动浇灌方法,其特征在于,所述图像处理步骤中利用高斯模糊在python中的算法,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到;高斯滤波模板计算公式:其中,i表示像素模板横坐标;j表示像素模板纵坐标;g
ij
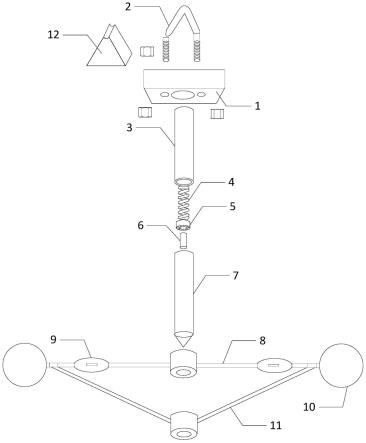
表示高斯模板;a表示1/2πσ(常数);σ表示高斯半径;e表示自然常数;u表示遵从正态分布的随机变量的均值;σ2表示μ变量的方差;在测试中,将公式中sigma1与sigma2设置值为1~10时,能够将面积较小的白色像素点与周围大面积的黑色部分相互交融,白色像素点的周围变得相对平滑,在高斯滤波模板数值的增大后,图像中原有的白色像素点就彻底与周围黑色区域融合消失,从而将处理后二值化图像中的小型白色噪点去除;二维图像简化公式,其中sigma1=sigma2:若在特定场地需要,只需更改高斯滤波模板公式中的sigma值。8.一种基于图像处理的道路绿化带自动浇灌系统,其特征在于,包括:总车体框架、车头、车身、车尾以及车底;所述总车体框架包括:铝合金框架和多个车轮;所述车头包括:上位机和下位机硬件;所述车身包括:水箱、水泵、广角摄像头、蓄电池以及nvidia板;所述车尾包括:舵机和浇水喷头;所述车底包括:多个车轮驱动电机;其中,在nvidia板上完成图像识别、测算深度的算法开发,并使用该板进行图像处理、上位机信号发射在内的相关操作。9.根据权利要求8所述的基于图像处理的道路绿化带自动浇灌系统,其特征在于,所述下位机硬件包括:电子调速器:控制车轮底盘电机转动;第一继电器:控制舵机;第二继电器:控制水泵;遥控接收板:控制行进;arduino单片机:作为下位机接收、驱动装置,控制驱动浇灌臂舵机。10.根据权利要求8所述的基于图像处理的道路绿化带自动浇灌系统,其特征在于,所述舵机设置为两个,全部选用工作扭矩为13kg
·
cm的mg995金属齿轮数字舵机;所述两个mg995数字舵机,与水管、浇水喷头和支撑结构组成双自由度浇灌臂,安装在车尾一侧。
技术总结
本发明提供一种基于图像处理的道路绿化带自动浇灌方法及系统,包括:图像采集步骤:由浇灌车上的拍摄图像,并由上位机截取摄像头画面;图像处理步骤:提取画面中绿化带植株颜色特征,并依次进行图像二值化、高斯模糊降噪处理;目标区域识别步骤:对经过处理后的图像判断有无目标区域,若没有,返回图像采集步骤,若有,则进入目标区域大小步骤;目标区域大小步骤:判断目标区域大小是否大于等于100000像素;执行步骤:目标区域大小判断完成后,通过高电频驱动浇灌车辆进行相应模式浇灌,由管理界面实时输出浇灌情况。本发明能够提升灌溉效率,从而实现自动精确的绿化带维护灌溉。从而实现自动精确的绿化带维护灌溉。从而实现自动精确的绿化带维护灌溉。
技术研发人员:蔡之恒 陆广琴
受保护的技术使用者:上海市金山区青少年活动中心
技术研发日:2022.08.25
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。