1.本发明属于属于医疗技术领域,具体涉及一种可调弯的血管内超声引导式穿刺方法。
背景技术:
2.穿刺是指将穿刺针穿刺至目标组织内抽取物质以进行化验,或向体腔注入气体或造影剂做造影检查,或向组织内注入药物的一种诊疗技术,穿刺的目的是活检,化验,注药、输液及置入导管做血管造影等。
3.例如:经颈静脉肝内门体分流术,其是治疗晚期肝硬化门静脉高压的有效手段,该诊疗技术的原理是从患者肝静脉穿刺到门静脉内,沿着该穿刺通道建立分流道,将门静脉内的血液分流到肝静脉内,以降低门静脉压力。
4.然而,在上述手术周工实施穿刺方法是在体外x线引导下,从肝静脉向门静脉方向进行穿刺,由于在x线下不能观察到门静脉的具体解剖位置,穿刺有一定盲目性,通常需要多次穿刺才能刺中门静脉,如果穿刺方向偏差,还可能引起腹腔内大出血,因此,需要一种血管内超声引导下的穿刺系统,以便准确定位到门静脉系统,实现精准穿刺。
5.又如:肝肿块的穿刺活检方法,其主要由体外超声引导或ct引导,但在肝脏内近膈顶部的肿块,由于肺的阻挡,往往导致ct和超声定位困难,不能完成穿刺。膈顶部的肿块临近肝静脉,从肝静脉内进行超声引导下的穿刺活检或穿刺消融,就能解决该临床困难。另外,临床上后腹膜肿块,由于位置较深,前方有肠道,后方有脊柱阻挡,往往使现有的穿刺导引方法不能成功,因此,亟需一种能够从下腔静脉内精准引导的的穿刺方法,这样就是能解决这一临床困境。
6.此外,目前的血管内超声成像导管和系统,其主要用于心脏冠脉狭窄评估、支架放置评估等。现有血管内超声虽然导管尺寸较小,导管直径在1mm-3mm,但是其只能成像,没有工作钳道,无法进行穿刺导引;而常规的超声内窥镜的导管尺寸较大,直径在6.5mm-12mm,无法进入血管内工作。
技术实现要素:
7.本发明所要解决的技术问题是克服现有技术的不足,提供一种改进的可调弯的血管内超声引导式穿刺方法。
8.为解决上述技术问题,本发明采取的技术方案如下:
9.一种可调弯的血管内超声引导式穿刺方法,其采用的穿刺系统包括具有远端和近端和内导管、超声成像单元、穿刺针,其中超声成像单元包括超声探头和成像处理器,穿刺针自内导管的远端向前穿出,内导管的外径为2mm~5mm,且在内导管内分别形成贯穿远端和近端且互不连通的工作嵌道和导丝通道,导丝通道的远端位于工作嵌道远端的前方,超声探头位于工作嵌道的远端和导丝通道的远端之间,穿刺系统还包括介入导丝,穿刺方法包括以下步骤:
10.s1、内导管在血管中的递送将内导管自远端插入血管,并将介入导丝插入导丝通道,同时介入导丝的远端向前冒出内导管的远端;或者将内导管沿预先置好的导丝送入血管内,且在所述介入导丝和超声成像的同步引导下,内导管逐步向内递送;
11.s2、头端弯度调节所述内导管的远端能够相对自身上下左右偏转和转动,以获取对应处组织超声图像和操作视野,直至内导管的远端递送并定位在待穿刺区,且保持远端的弯曲度;
12.s3、穿刺针的穿刺将穿刺针穿入工作钳道后,沿着工作钳道的远端所形成偏转导向角度,并保持对应角度穿刺至待穿刺区。
13.优选地,在s2中所形成的偏转导向角度为20~45
°
。
14.根据本发明的一个具体实施和优选方面,工作钳道包括沿着内导管长度方向延伸的第一通道、位于第一通道远端的第二通道,其中第二通道为弧形导向通道,且自弧形导向通道穿出的穿刺针部分与第一通道内穿刺针部分之间形成的偏转导向角度。也就是说,在工作钳道的末端,为了确保穿刺针的穿刺方向,其钳道管道在此有一固定的上升角度,这样能够降低穿刺时造成的穿刺针端部的晃动,更有利于实施精准穿刺。
15.优选地,内导管的远端通过内部牵引相对上下左右转向运动。
16.优选地,内导管在靠近工作嵌道出口处形成调弯部,调弯部包括管本体、包覆于管本体外周的外皮、位于管本体和外皮之间的蛇骨,其中蛇骨弯折以带动内导管的远端转向。
17.进一步的,蛇骨包括多节套设在管本体外的骨套、用于将骨套相连接的牵引丝,其中牵引丝有多根且与操作手柄连接,在牵引丝的运动下以带动骨套的上下左右偏转。
18.根据本发明的一个具体实施和优选方面,工作嵌道的内径为0.7mm~1.5mm,导丝通道的内径为0.38mm~0.60mm。这样一来,进一步限定了静脉穿刺系统的使用范围,例如:经颈静脉肝内门体分流术中的门静脉穿刺;临床上的肝顶部和后腹膜肿块穿刺治疗等等,具有很好的临床应用价值和前景。
19.具体的,内导管的长度为60~100cm。
20.优选地,在s1的操作之前,需要将各部件进行消毒处理。
21.根据本发明的又一具体实施和优选方面,超声探头位于内导管的一侧,且超声探头的外周形成一血液隔离保护层的声透镜,其中声透镜的材质为硅胶或橡胶。
22.此外,超声探头的阵元数为32~128阵元,且呈线阵或面阵分布;所述超声探头的中心频率范围为5~12.5mhz。
23.成像处理器主要负责激励远端的超声探头工作,并接收探头的回波信号,将处理后形成的图像,实时显示在屏幕上供操作者观测。
24.本例中,具有b型、m型、doppler型、弹性成像、造影成像和谐波成像等多种成像模式。有穿刺增强和指引功能,同时成像处理器还具有输入病患信息,保存相关诊疗数据等功能。
25.由于以上技术方案的实施,本发明与现有技术相比具有如下优点:
26.本发明在介入导丝和超声探头的同步成像的双重引导下,并结合内导管远端的运动,将内导管的远端精定位至待穿刺区,调整头端的弯曲度,以使得穿刺针沿着特定的工作钳道穿至指定位置,避免盲穿的风险,因此,特别适合经颈静脉肝内门体分流术中的由肝静脉向门静脉精准的穿刺、以及临床上的临近各种血管周围的肿块和器官的穿刺,具有很好
的临床应用价值和前景。
附图说明
27.图1为本实施例的穿刺系统的结构示意图;
28.图2为图1的局部结构放大示意图;
29.图3为本实施例内导管的调弯部的截面放大示意图;
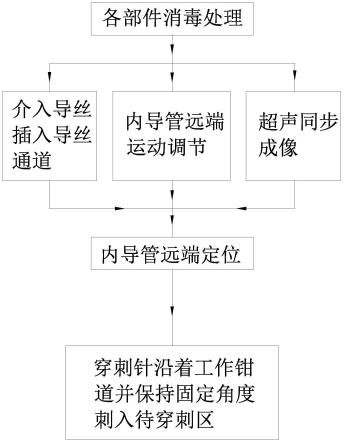
30.图4为本实施例的血管内超声引导式穿刺方法的原理示意图;
31.其中:1、内导管;1a、远端;1b、近端;1c、调弯部;10、管本体;11、外皮;12、蛇骨;120、骨套;121、钢丝;2、超声成像单元;20、超声探头;21、成像处理器;22、声透镜;23、连接线缆;3、穿刺针;4、操作手柄;5、介入导丝;6、工作嵌道;61、第一通道;62、第二通道;7、导丝通道;8、管塞。
具体实施方式
32.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施例的限制。
33.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
34.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
35.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
36.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
37.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平
的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
38.如图1和图2所示,本实施例的可调弯的血管内超声引导式穿刺系统,其包括内导管1、超声成像单元2、穿刺针3(或者消融针)、操作手柄4、及介入导丝5。
39.具体的,内导管1具有位于人体内外的远端1a和近端1b。
40.在内导管1内分别形成贯穿远端和近端且互不连通的工作嵌道6和导丝通道7,其中工作嵌道6的远端位于导丝通道7的远端的后方。
41.超声成像单元2包括设置在内导管1的远端1a的超声探头20、成像处理器21,其中超声探头20位于两个工作嵌道6和导丝通道7的远端之间且位于内导管1的一侧。
42.同时,在超声探头20外周还设有声透镜22,其中声透镜22的材质为硅胶或橡胶。也就是说,声透镜不会造成人体组织损伤,同时为了与血液隔离,及安全性的考虑,超声探头20的表面为一保护性的超声透镜,其材料主要为硅胶、橡胶或者相关的混合物。此外,若为了实现极小的内导管1直径,超声探头20也可以为小尺寸的相控阵线阵探头。
43.本例中,超声探头20为一小型化的凸阵探头,超声探头20的阵元数根据不同的内导管1尺寸要求其可行的范围为50~100个阵元。为了满足较深的成像深度,以更好地指导介入治疗,超声探头20的中心频率范围为6~10mhz。为了获取较高的探测灵敏度和图像信噪比,超声探头20的材料可以是压电陶瓷、压电单晶、压电复合材料等。
44.穿刺针3自工作嵌道6的近端穿入并向前自工作嵌道6的远端穿出设置。
45.操作手柄4设置在内导管1的近端1b。
46.介入导丝5的引导端部自导丝通道7穿出内导管1的远端,穿刺针3自工作嵌道6的远端穿出并穿刺至超声探头20所朝向的待穿刺区。
47.本例中,内导管1的长度为80cm,内导管的外径为3mm,工作嵌道的内径为1.0mm,导丝通道的内径为0.44mm。这样一来,进一步限定了静脉穿刺系统的使用范围,例如:经颈静脉门体分流术中的门静脉穿刺;临床上的肝顶部和后腹膜肿块活检治疗中实现血管内肝静脉向门静脉精准穿刺等等,具有很好的临床应用价值和前景。
48.结合图3所示,内导管1的远端能够上下左右调节。这样一来,能够获取期望的组织超声图像和操作视野。
49.内导管1为常规的导管,而且在靠近工作嵌道6出口处设有调弯部1c,其调弯部1c包括管本体10、包覆于管本体10外周的外皮11、位于管本体10和外皮11之间的蛇骨12,其中蛇骨12弯折以带动内导管的远端转向。方便实施偏转操作,更准确地获得待穿刺区域的图像信息。
50.蛇骨12包括多节套设在管本体10外的骨套120、用于将骨套120相连接的钢丝121,其中钢丝120有多根且与操作手柄4连接,在钢丝121的运动下以带动骨套120的上下左右偏转。
51.外皮11的材质为ptfe或fep或pfa或eva或ldpe中的一种,骨套120的材质为不锈钢,钢丝121为单股钢丝。
52.也就是说,外面包覆一层外皮是由生物相容性的套管材料组成,如ptfe、fep、pfa、eva和ldpe等各类聚合物树脂材料。外皮下是蛇骨,其由薄片的不锈钢等金属组成导管网状结构,起到支撑内导管的结构和方便弯折的功能。
53.在蛇骨上特定的位置,固定有四根操控内导管上下、左右弯折的钢丝。钢丝可以是单根钢丝,也可以是一束多根细钢丝组成,且钢丝的尾部与操作手柄连接。
54.本例中,工作嵌道6包括沿着内导管1长度方向延伸的第一通道61、位于第一通道61远端的第二通道62,其中第二通道62为弧形导向通道,且自弧形导向通道穿出的穿刺针部分与第一通道61内穿刺针部分之间形成的角度为36
°
。也就是说,在工作钳道的末端,为了确保穿刺针的穿刺方向,其钳道管道在此有一固定的上升角度,这样能够降低穿刺时造成的穿刺针端部的晃动,更有利于实施精准穿刺。
55.操作手柄4的主要功能是由若干操作按钮与内导管的钢丝连接,在手柄端实现内导管1远端1a的上下左右移动,同时工作钳道6和导丝通道7也在其内,因此,方便医生插入穿刺针和介入导丝等操作。
56.此外,超声探头20和成像处理器21之间通过位于内导管1内部的连接线缆23进行电源和信号的传输交互,因此,连接线缆23能够将工作钳道6和导丝通道7相对隔开。
57.成像处理器21主要负责激励远端的超声探头工作,并接收探头的回波信号,将处理后形成的图像,实时显示在屏幕上供操作者观测。
58.本例中,具有b型、m型、doppler型、弹性成像、造影成像和谐波成像等多种成像模式。有穿刺增强和指引功能,同时成像处理器还具有输入病患信息,保存相关诊疗数据等功能。
59.此外,内导管1的远端1a呈尖端设置,且与导丝过度平滑,血管内输送时不损伤血管,同时也便于导丝相对通道的运动。
60.内导管1的近端1b还设有管塞8,其中管塞8中分别形成与工作嵌道6和导丝通道7相连通的通道,且通道中还设有防止漏血的硅胶阀门和冲洗通道的三通阀。
61.综上,本实施例的工作原理如下(结合图4所示):
62.1)本系统工作前,需先对穿刺系统的各个部件进行消毒处理;
63.2)工作时,先通过线缆将超声探头20与成像处理器21的电源和信号交互连通;
64.3)将内导管1自远端1a插入血管,并将介入导丝5插入导丝通道7,同时介入导丝5的远端向前冒出内导管1的远端1a,接着在介入导丝5和超声成像的同步引导下,内导管1逐步向内递送,且接着控制操作手柄4,由内导管1的远端1a的上下左右移动的超声探头20,获取期望的组织超声图像和操作视野,并由成像处理器21进行成像,直至内导管1的远端1a递送并定位在待穿刺区;
65.4)将穿刺针3或者消融针等介入手术器具穿入工作钳道6后,沿着工作钳道6的远端所形成偏转导向角度36
°
,并保持对应角度(36
°
)穿刺至待穿刺区。
66.综上,本实施例具有以下优势:
67.1)通过在内导管中集成超声探头、工作钳道和导丝引导等功能,可有效解决:a、现有血管内超声导管和系统只能成像而无法引导介入治疗;b、现有内窥镜尺寸太大无法进入血管;c、介入导丝和超声探头的同步成像的双重引导下,并结合内导管远端的运动,将内导管的远端精定位至待穿刺区,调整头端的弯曲度,以使得穿刺针沿着特定的工作钳道穿至指定位置,解决现有体外超声引导或ct引导穿刺活检肝肿块的定位困难和盲穿风险;
68.2)特别适合经颈静脉肝内门体分流术中的由肝静脉向门静脉精准的穿刺、以及临床上的临近各种血管周围的肿块和器官的穿刺,具有很好的临床应用价值和前景。
69.以上对本发明做了详尽的描述,其目的在于让熟悉此领域技术的人士能够了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明的精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。