1.本公开涉及用于控制可调节联接器的枢转位置以优化飞行器发动机内的间隙的系统和方法。
背景技术:
2.涡轮叶片尖端间隙的优化导致更好的发动机性能和燃料效率。即,在不同的推力阶段,发动机暴露于例如热和离心力之类的负载,这些负载会导致某些部件的膨胀和部件对准的偏移,例如高压压缩机内的轴的位置。例如,高压压缩机中的轴可以横向偏移,导致转子叶片和定子流动路径的中心线之间的对准发生变化。
3.为了调节旋转涡轮叶片(例如,高压压缩机的转子叶片)的尖端和例如护罩的涡轮壳体之间的间隙(其影响定子流动路径),主动间隙控制(acc)系统可以提供热控制空气,该热控制空气冲击涡轮壳体,目的是调节该壳体和护罩相对于转子叶片尖端的位置。更具体地,发动机控制器(例如,配备有全权限数字发动机控制(fadec)的电子发动机控制器(eec)或电子控制单元(ecu))可以利用间隙算法来计算瞬时涡轮叶片尖端间隙。然后可以将计算出的间隙与叶片尖端间隙目标进行比较。如果计算出的间隙与间隙目标不一致,则acc系统可以调节叶片尖端间隙以迫使计算出的间隙与间隙目标一致。以这种方式,护罩相对于叶片尖端被调节。
4.尽管acc系统具有控制叶片尖端间隙的能力,但是通常在不考虑发动机如何实际地或独特地操作的情况下设定间隙目标。相反,特定发动机型号的每个发动机都以相同的叶片尖端间隙为目标,而不管发动机如何操作。此外,发动机设计必须考虑冷构建间隙以避免在发动机运行时导致开放间隙中的摩擦。
5.因此,用于调节叶片尖端间隙的改进的主动间隙控制逻辑可以提供更大的效率改进和燃料使用。
技术实现要素:
6.在一个实施例中,一种用于优化飞行器发动机内的间隙的系统包括:可调节联接器,可调节联接器被配置为将推力连杆联接到飞行器发动机;致动器,致动器联接到可调节联接器,其中由致动器产生的运动调节可调节联接器的铰链点;一个或多个传感器,一个或多个传感器被配置为捕获实时飞行数据;和电子控制单元,电子控制单元通信地联接到致动器和一个或多个传感器。电子控制单元被配置为从一个或多个传感器接收飞行数据,实施被训练以基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型,利用机器学习模型,基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值,基于一个或多个间隙值确定致动器位置,和使致动器调节到确定的致动器位置。
7.在一个实施例中,一种用于优化飞行器发动机内的间隙的方法,包括:利用电子控制单元,从一个或多个传感器接收飞行数据;利用电子控制单元,实施被训练以基于飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型;利用机器学习模型,基于飞
行数据预测飞行器发动机内的一个或多个间隙值;利用电子控制单元,基于一个或多个间隙值确定致动器位置;和利用电子控制单元,使致动器调节到确定的致动器位置。
8.在一个实施例中,一种飞行器,包括:飞行器发动机,飞行器发动机利用至少一个推力连杆和可调节联接器联接到机翼,其中可调节联接器包括用于联接到至少一个推力连杆的至少一个孔和限定可调节联接器的铰链点的槽;致动器,致动器包括可滑动地联接在槽内的枢轴销,其中由致动器产生的运动调节枢轴销在槽内的位置,从而改变可调节联接器的铰链点;一个或多个传感器,一个或多个传感器被配置为捕获实时飞行数据;和电子控制单元,电子控制单元通信地联接到致动器和一个或多个传感器。电子控制单元被配置为从一个或多个传感器接收飞行数据,实施被训练以基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型,利用所述机器学习模型,基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值,基于一个或多个间隙值确定致动器位置,和使致动器调节到确定的致动器位置。
9.本技术的这些和其他特征和特性,以及结构和部件组合的相关元件的操作方法和功能以及制造经济性,在考虑以下参考附图的描述和所附权利要求后将变得更加明显,其中所有这些构成本说明书的一部分,其中相似的附图标记表示各个附图中的对应部分。然而,应明确理解,附图仅用于说明和描述的目的,并不旨在作为对本公开的限制的定义。如说明书和权利要求书中所用,单数形式的“一”、“一个”和“该”可以包括复数指代,除非上下文另有明确规定。
附图说明
10.附图中阐述的实施例在本质上是说明性和示例性的,并且不旨在限制由权利要求限定的主题。当结合以下附图阅读时,可以理解说明性实施例的以下详细描述,其中相似的结构用相似的附图标记表示,并且其中:
11.图1示意性地描绘了根据本文所示和描述的一个或多个实施例的示例飞行器系统;
12.图2a描绘了根据本文所示和描述的一个或多个实施例的飞行器发动机的横截面的说明性示例;
13.图2b描绘了根据本文所示和描述的一个或多个实施例的联接到飞行器的机翼的飞行器发动机的说明性示例,该飞行器发动机包括用于调节飞行器发动机的轴中心线的推力连杆横杆(whiffletree);
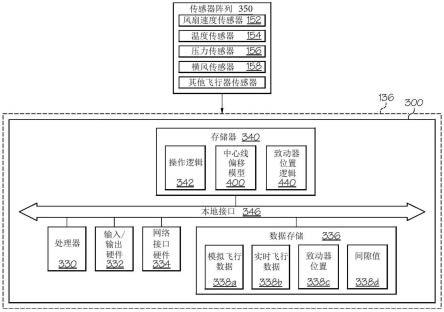
14.图3示意性地描绘了根据本文所示和描述的一个或多个实施例的发动机控制系统的功能框图,该发动机控制系统被配置为包括用于优化飞行器发动机内的间隙的电子控制单元;
15.图4是根据本文所示和描述的一个或多个实施例的用于控制可变推力连杆横杆的枢转位置以优化飞行器发动机内的间隙的说明性系统图;
16.图5描绘了图示根据本文所示和描述的一个或多个实施例的通过优化定子和转子在水平(横向)方向上的居中来减小间隙的图表;和
17.图6描绘了图示根据本文所示和描述的一个或多个实施例的飞行器发动机的高压压缩机的多级的间隙减小的图表。
具体实施方式
18.本公开的实施例包括用于优化飞行器发动机内的间隙以改进比燃料消耗率(sfc)和提高发动机的操作效率的系统和方法。更具体地,本文所公开的系统和方法涉及通过控制推力连杆铰链的铰链点来优化间隙,在本文中推力连杆铰链被称为可调节联接器,例如,横杆。本公开进一步提供了用于调节横杆的铰链位置的控制逻辑,如本文更详细描述的。横杆的铰链位置通过减少冷间隙提供了关于转子到定子在水平方向上的居中的更好控制。也就是说,更严格的冷间隙将反映更严格的巡航间隙,从而减少sfc并提高效率。例如,在本文描述的一些实施例中,高压压缩机中的间隙可以改进~3-5密耳(mill),例如提供0.05至0.1%的sfc改进。
19.现在将详细参考本发明的当前实施例,其一个或多个示例在附图中示出。详细描述使用数字和字母标号来指代附图中的特征。附图和描述中的相似或类似的标号已用于指代本发明的相似或类似部分。如本文所用,术语“第一”、“第二”、“第三”等可以互换使用以区分一个部件与另一个部件,并且不旨在表示各个部件的位置或重要性。术语“上游”和“下游”指的是相对于流体路径中的流体流动的相对流动方向。例如,“上游”指的是流体从其流动的流动方向,而“下游”指的是流体向其流动的流动方向。“hp”表示高压,“lp”表示低压。
20.此外,如本文所用,术语“轴向”或“轴向地”指的是沿着发动机的纵向轴线的尺寸。与“轴向”或“轴向地”结合使用的术语“前”指的是朝向发动机入口的方向,或朝向与另一个部件相比相对更接近发动机入口的部件的方向。与“轴向”或“轴向地”结合使用的术语“后”或“后方”指的是朝向发动机喷嘴的方向,或朝向与另一个部件相比相对更接近发动机喷嘴的部件的方向。术语“径向”或“径向地”指的是在发动机的中心纵向轴线(或中心线)和发动机外圆周之间延伸的尺寸。“径向向内”是朝向纵向轴线,并且“径向向外”是远离纵向轴线。
21.本公开的示例性方面涉及用于通过控制横杆连杆的铰链位置来调节叶片尖端间隙目标的系统和方法。在一个实施例中,横杆包括至少一个孔,用于联接到一个或多个推力连杆,该推力连杆可以进一步联接到飞行器机翼和/或机身。横杆还包括限定铰链点的槽。包括枢轴销的致动器可滑动地联接在横杆的槽内。由致动器产生的运动调节枢轴销在横杆的槽内的位置,从而改变横杆的铰链点。被配置为捕获实时飞行数据的一个或多个传感器生成信号并将信号发送到通信地联接到致动器的电子控制单元。电子控制单元被配置为从一个或多个传感器接收飞行数据,实施被训练以基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型,利用机器学习模型,基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值,基于一个或多个间隙值确定致动器位置;和使致动器调节到确定的致动器位置。
22.现在参考附图,将详细描绘和描述用于优化飞行器发动机的间隙的与飞行器、系统和方法有关的本公开的实施例。
23.图1描绘了说明性飞行器系统100。在图1的所示实施例中,飞行器系统100通常包括飞行器130,其可以包括机身132、机翼组件138和一个或多个发动机140。虽然图1将飞行器130描绘为具有两个机翼组件138的固定翼飞行器,其中每个机翼组件138上安装一个发动机140(总共两个发动机140),但是其他配置也是可以考虑的。例如,其他配置和/或飞行器可以包括具有补充平移推力系统的高速复合旋翼飞行器、双对旋-同轴转子系统飞行器、涡轮螺旋桨-倾斜转子-倾斜机翼飞行器、传统起降飞行器和其他涡轮驱动机器也将受益于
本公开。此外,其他配置可以包括多于两个机翼组件138、多于两个发动机140(例如,三喷气式发动机、四喷气式发动机等)、未安装到机翼组件138(例如,安装到机身132、安装到机尾、安装到机头等)的发动机140、非固定机翼(例如,旋翼飞行器)和/或类似物。
24.回到图1所描绘的所示飞行器系统,如图所示,用于控制飞行器130的控制机构160包括在驾驶舱134中并且可以由位于其中的飞行员操作。应当理解,本文使用的术语“控制机构”是通用术语,用于涵盖所有飞行器控制部件,尤其是通常在驾驶舱134中发现的那些。
25.使飞行器130能够正确操作的多个附加飞行器系统144以及发动机控制系统136和具有飞行器无线通信链路166的通信系统也可以包括在飞行器130中。附加飞行器系统144通常可以是影响飞行器130的一个或多个部件的控制(例如机舱压力控制、升降舵控制、方向舵控制、襟翼控制、扰流板控制、起落架控制、热交换器控制和/或类似物)的任何系统。在一些实施例中,飞行器130的航空电子设备可以被一个或多个附加飞行器系统144包围。飞行器无线通信链路166通常可以是现在已知或以后开发的任何空对地通信系统。飞行器无线通信链路166的说明性示例包括但不限于转发器、甚高频(vhf)通信系统、飞行器通信寻址和报告系统(acars)、管制员-飞行员数据链路通信(cpdlc)系统、未来空中导航系统(fans)和/或类似物。发动机控制系统136可以通信地联接到多个飞行器系统144和发动机140。在一些实施例中,发动机控制系统136可以安装在一个或多个发动机140上或安装在飞行器130内并且通信地联接到发动机140。虽然图1中描绘的实施例具体涉及发动机控制系统136,但应当理解,其他控制器也可以包括在飞行器130内,以控制不具体涉及发动机140的各种其他飞行器系统144。
26.发动机控制系统136通常包括用于控制每个发动机140的一个或多个部件,例如诊断计算机、安装在一个或多个发动机140或飞行器130上的与发动机相关的数字电子单元,和/或类似物。发动机控制系统136也可以称为数字发动机控制系统。发动机控制系统内可以与发动机控制系统136一起工作并且可能需要软件来操作的说明性其他部件包括但不限于电子控制单元(ecu)和其他控制器装置。在这些部件中的任何一个中实现的软件可以是分布在部件和控制器之间的软件。
27.发动机控制系统136还可以与飞行器130的其他控制器连接。在实施例中,发动机控制系统136可以包括处理器330和/或包括非暂时性存储器的非暂时性存储器部件340。在一些实施例中,非暂时性存储器部件340可以包括随机存取存储器(ram)、只读存储器(rom)、闪存存储器或一种或多种不同类型的便携式电子存储器,例如盘、dvd、cd-rom等,或这些类型的存储器的任何适当组合。处理器330可以执行存储在非暂时性存储器部件340上的一个或多个编程指令,从而引起发动机控制系统136的操作。也就是说,发动机控制系统136内的处理器330和非暂时性存储器部件340可操作以执行本文描述的关于发动机控制系统136的各种过程,包括操作飞行器130的各种部件(例如,发动机140和/或其部件),监视飞行器130的各种部件(例如,发动机140和/或其部件)的健康状况,监视飞行器130和/或其部件的操作,安装软件,安装软件更新,修改分布式账本中的记录以指示软件已安装和/或更新,根据已安装和/或更新的软件执行过程,和/或类似物。
28.在一些实施例中,发动机控制系统136可以是全权限数字发动机控制(fadec)系统。这种fadec系统可以包括控制每个发动机140的各种电子部件、一个或多个传感器和/或一个或多个致动器。在一些实施例中,fadec系统包括电子控制单元(ecu),以及被配置为控
制发动机140的性能的各个方面的一个或多个附加部件。fadec系统通常对发动机140的操作参数具有完全权限并且不能被手动超控。fadec系统通常通过接收当前飞行条件的多个输入变量来起作用,当前飞行条件包括但不限于空气密度、节气门杆位置、发动机温度、发动机压力和/或类似物。这些输入被接收、分析并用于确定操作参数,例如但不限于燃料流量、定子轮叶位置、放气阀位置和/或类似物。fadec系统还可以控制发动机140的启动或重新启动。fadec的操作参数可以通过安装和/或更新软件(例如由本文描述的飞行器系统100分发的软件)来修改。因此,fadec可以被编程控制以确定发动机限制,接收发动机健康状况报告,接收发动机维护报告和/或类似物,以在某些条件下采取某些措施和/或动作。
29.由发动机控制系统136运行(例如,由处理器330执行并存储在非暂时性存储器部件340内)的软件可以包括计算机程序产品,该计算机程序产品包括用于携带或具有机器可执行指令或数据结构的机器可读介质。这种机器可读介质可以是任何可用介质,其可以由通用或专用计算机或具有处理器的其他机器访问。通常,这样的计算机程序可以包括具有执行特定任务或实现特定抽象数据类型的技术效果的例程、程序、对象、部件、数据结构、算法和/或类似物。机器可执行指令、相关数据结构和程序代表用于执行本文所公开的信息交换的程序代码的示例。机器可执行指令可以包括例如指令和数据,它们使通用计算机、专用计算机或专用处理机器执行某些功能或功能组。在一些实施例中,计算机程序产品可以由发动机控制系统136外部的部件提供并安装以供发动机控制系统136使用。例如,计算机程序产品可以由地面支持设备170提供,如本文更详细地描述的。计算机程序产品通常可以通过从飞行器系统100的一个或多个部件(例如,地面支持设备170)接收的软件更新来更新,如本文更详细描述的。该软件通常通过安装更新而由发动机控制系统136更新,使得该更新补充和/或覆盖计算机程序产品的现有程序代码的一个或多个部分。软件更新可以允许计算机程序产品更准确地进行诊断和/或预测故障,提供最初未提供的附加功能,和/或类似物。
30.在实施例中,每个发动机140可以包括风扇142和一个或多个传感器,该一个或多个传感器用于在发动机140操作期间感测风扇142的各种特性。一个或多个传感器的说明性示例包括但不限于风扇速度传感器152、温度传感器154、压力传感器156、横风传感器158和/或其他飞行器或飞行传感器。风扇速度传感器152通常是测量发动机140内的风扇142的旋转速度的传感器。温度传感器154可以是测量发动机140内的流体温度(例如,发动机空气温度)、发动机进气位置处的流体(例如,空气)的温度、压缩机内的流体(例如,空气)的温度、涡轮内的流体(例如,空气)的温度、燃烧室内的流体(例如,空气)的温度、发动机排气位置处的流体(例如,空气)的温度、在发动机中或周围的热交换器中使用的冷却流体和/或加热流体的温度和/或类似物的传感器。压力传感器156可以是测量发动机140中和/或周围的不同位置的流体压力(例如,空气压力)的传感器,例如,发动机进气口处的流体压力(例如,空气压力)、压缩机内的流体压力(例如,空气压力)、涡轮内的流体压力(例如,空气压力)、燃烧室内的流体压力(例如,空气压力)、发动机排气位置处的流体压力(例如,空气压力)和/或类似物。横风传感器158可以是一个或多个传感器,其在飞机穿过飞行路径时测量和/或有助于计算横风。
31.在一些实施例中,每个发动机140可以具有与其相关联的多个传感器(包括一个或多个风扇速度传感器152、一个或多个温度传感器154、一个或多个压力传感器156和/或一
个或多个横风传感器158)。也就是说,可以使用多于一个相同类型的传感器来感测发动机140的特性(例如,用于相同发动机140的不同区域中的每一个的传感器)。在一些实施例中,一个或多个传感器可用于感测多于一个发动机140的特性(例如,单个传感器可用于感测两个发动机140的特性)。在一些实施例中,发动机140还可以包括未在本文中具体描述的附加部件,并且可以包括与这样的附加部件结合或配置为感测这样的附加部件的一个或多个附加传感器。
32.在实施例中,每个传感器(包括但不限于风扇速度传感器152、温度传感器154、压力传感器156、横风传感器158和/或其他传感器)可以通信地联接到飞行器130的一个或多个部件,使得与一个或多个感测到的特性有关的信号和/或数据从传感器传输,用于确定、检测和/或预测故障,以及根据需要传感器信息的软件完成一个或多个其他动作的目的。如图1所示的实施例中在各种传感器(例如,风扇速度传感器152、温度传感器154、压力传感器156、横风传感器158和/或其他传感器)和飞行器系统144和发动机控制系统136之间延伸的虚线所指示的,在一些实施例中,各种传感器可以通信地联接到飞行器系统144和/或发动机控制系统136。因此,各种传感器可以通过有线或无线通信地联接到飞行器系统144和/或发动机控制系统136,以通过飞行器总线将信号和/或数据传输到飞行器系统144和/或发动机控制系统136。
33.飞行器总线可以使飞行器和/或飞行器的一个或多个部件能够通过无线或有线方式与一个或多个外部系统接口。如本文所用的飞行器总线可以由被配置为传输信号的任何介质形成。作为非限制性示例,飞行器总线由导线、导电迹线、光波导等等形成。飞行器总线也可以指电磁辐射及其相应的电磁波在其中传播的范围。此外,飞行器总线可以由被配置为传输信号的介质的组合形成。在一个实施例中,飞行器总线包括导电迹线、导线、连接器和总线的组合,它们协作以允许将电数据信号传输到发动机控制系统136的各个部件以及从发动机控制系统136的各个部件传输电数据信号。另外,应注意的是术语“信号”指的是被配置为通过介质(例如dc、ac、正弦波、三角波、方波、振动等等)传播的波形(例如,电、光、磁、机械或电磁的)。
34.例如,通过网络联接的部件的互连性可以包括广域网(例如互联网)、局域网(lan)、移动通信网络、公共服务电话网络(pstn)和/或其他网络,并且可以被配置为以电子方式连接部件。可以通过网络连接的说明性部件包括但不限于与飞行器130通信(例如,通过地面无线通信链路122和飞行器无线通信链路166)的地面系统120,和/或通过有线或无线系统的地面支持设备170。
35.应当理解,飞行器130仅代表一个说明性实施例,其可以被配置为实施本文描述的装置、系统和方法的实施例或实施例的一部分。在操作期间,作为非限制性示例,控制机构160可用于操作飞行器系统144中的一个或多个。各种传感器,包括但不限于风扇速度传感器152、温度传感器154、压力传感器156和/或横风传感器158,可以输出与发动机140和/或其他飞行器系统144的各种特性相关的数据。发动机控制系统136可以利用来自控制机构160、风扇速度传感器152、温度传感器154、压力传感器156、横风传感器158、各种飞行器系统144、一个或多个数据库的输入,和/或来自航空公司控制、飞行操作等等的信息,用于诊断、检测和/或预测航空公司维护人员可能不知道的故障。其中,发动机控制系统136可以分析由各种传感器(例如,风扇速度传感器152、温度传感器154、压力传感器156、横风传感器
158等)在一段时间内输出的数据,以确定发动机140和/或各种其他飞行器系统144的操作中的漂移、趋势、步骤或尖峰的时间。发动机控制系统136还可以分析系统数据以确定历史压力、历史温度、飞行器130上的多个发动机140之间的压力差、飞行器130上的多个发动机140之间的温度差和/或类似物,并基于这些来诊断、检测和/或预测发动机140和/或各种其他飞行器系统144中的故障。飞行器无线通信链路166和地面无线通信链路122可以传输数据,使得与故障有关的数据和/或信息可以从飞行器130传输出去。
36.虽然图1的实施例具体涉及飞行器130内的部件,但本公开不限于此。也就是说,关于飞行器130所描绘的各种部件可以结合在各种其他类型的飞行器中并且可以以类似的方式起作用,以向如本文描述的发动机控制系统136递送和安装新软件和/或更新的软件。例如,本文关于飞行器130描述的各种部件可以存在于船只、航天器和/或类似物中,而不背离本公开的范围。
37.此外,应当理解,尽管已经图示和描述了特定的飞行器,但其他配置和/或飞行器,例如具有补充平移推力系统的高速复合旋翼飞行器、双对旋-同轴转子系统飞行器、涡轮螺旋桨-倾斜转子-倾斜机翼飞行器、传统起降飞行器和其他涡轮驱动机器也将受益于本公开。
38.仍然参考图1,地面系统120通常是位于地面上的传输系统,其能够向飞行器130传输信号和/或从飞行器130接收信号。也就是说,地面系统120可以包括通信地联接到飞行器无线通信链路166以无线传输和/或接收信号和/或数据的地面无线通信链路122。在一些实施例中,地面系统120可以是空中交通管制(atc)塔和/或其一个或多个部件或系统。因此,地面无线通信链路122可以是vhf通信系统、acars单元、cpdlc系统、fans,和/或类似物。使用地面系统120和地面无线通信链路122,图1的实施例所描绘的各种非飞行器部件也可以通信地联接到飞行器130,即使是在飞行器130在空中和飞行中的情况下,从而允许在可能需要这种软件和/或软件更新时按需传输软件和/或软件更新。然而,应当理解,图1中所描绘的实施例仅仅是说明性的。在其他实施例中,飞行器130在地面上时可以通信地联接到飞行器系统100的各种其他部件并且物理地联接到飞行器系统100的部件中的一个,例如地面支持设备170。
39.地面支持设备(gse)170是用于支持和测试发动机控制系统136和/或飞行器系统100的其他部件的外部设备。地面支持设备170被配置为向发动机控制系统136提供软件更新和下载由发动机控制系统136在飞行期间获得的数据。作为另一个非限制性示例,gse 170可以包括用于受限数据监控的生产支持设备、用于全面数据监控和改变可调参数的测试支持设备、以及用于系统和软件测试的集成测试台。在实施例中,gse 170可以通过有线局域网或以太网连接到发动机控制系统136。gse 170可以根据以太网协议与发动机控制系统136通信。gse 170可以是便携式维护访问终端。gse 170可以通过与发动机控制系统136的ecu 200直接通信来测试飞行器的弹道模式,这将在本文中更详细地描述。
40.现在参考图2a,描绘了联接到飞行器的机翼138的飞行器发动机140的说明性横截面。为简洁起见,省略了本文描述的其他实施例中采用的相似元件的重复描述。航空发动机140包括入口202、风扇142、压缩机206、燃烧器208、涡轮210和喷嘴212。
41.在操作期间,一定体积的空气通过风扇区段的入口202被吸入。入口202可以通过入口202连续地将空气吸入航空发动机140中并确保进入航空发动机140的气流顺畅。当一
定体积的空气通过风扇142时,空气的第一部分可以被引导或导向到位于压缩机206外部的旁通气流通道。空气的第二部分被引导或导通到压缩机206。然后空气的第二部分的压力随着其从压缩机206的lp区段导向通过压缩机206的hp区段并进入燃烧器208而被增加。风扇142和压缩机206由旋转叶片和固定轮叶组成。压缩机206具有转子,转子包括旋转叶片,旋转叶片具有转子叶片尖端216,转子叶片尖端216与定子226隔开预定的冷间隙,定子226可以包括壳体、固定轮叶、护罩和/或类似物。在静态、非操作模式中,例如风扇142、压缩机206、燃烧器208和涡轮210的旋转部件以及定子可以沿着轴组件209和中心线“c”定位和居中。空气的压力和温度随着其移动通过压缩机206而增加。
42.燃烧器208可以连续地将燃料添加到压缩空气中并且将其燃烧。在燃烧器208中产生的燃烧气体从燃烧器208沿着热气体路径导向通过涡轮210,在涡轮210中,来自燃烧气体的一部分热能和/或动能通过联接到外壳体226的涡轮定子轮叶和联接到轴组件209的涡轮转子叶片211的顺序级被提取,因此使轴组件209旋转,从而支持压缩机206、燃烧器208和涡轮210的操作。该能量中的一些也可用于驱动压缩机206。来自压缩机206的冷却空气或冷却剂可用于冷却涡轮210的涡轮叶片。来自涡轮210的排出气体通过喷嘴212以产生高速射流。例如,燃烧气体随后被导向通过涡轮发动机的喷射排气喷嘴212以提供推进推力。
43.如下文更详细描述的,在操作中,例如不对称的热负载和机械负载的内力和外力,包括例如但不限于空气扭矩、陀螺仪、热结合、入口空气动力学、横风、惯性负载等等,导致转子叶片尖端216和定子流动路径(例如,通过定子226的固定轮叶)之间的横向相对运动。例如,如箭头230所描绘的横向运动导致转子叶片尖端216和定子226之间的间隙改变。因此,飞行器发动机140被设计为具有在本文中称为冷间隙的余量,以补偿横向运动,否则该横向运动将导致转子叶片尖端216和定子226以及飞行器发动机140的其他部分之间的不期望的接触,即摩擦。这些冷间隙可以通过实施本文描述的系统和方法而被减少。即,本文描述的系统和方法提供了用于通过调节横杆的铰链点来主动优化飞行器发动机140内的间隙的装置,使得在飞行器发动机140的水平方向上转子和定子之间的间隙被连续调节以更好地使两者居中。
44.通过实施本文描述的主动可调节的横杆和用于控制其的控制逻辑,可以减少设计所需的冷间隙,因此使间隙最小化,从而降低sfc并提高效率。转到图2b,描绘了图1和图2a中示出的飞行器发动机140的说明性示例,根据一个或多个实施例,该飞行器发动机140联接到飞行器的机翼,包括用于调节飞行器发动机140的轴中心线的对准的推力连杆横杆。图2b中描绘的实施例描绘了安装在飞行器的机翼138上的飞行器发动机140。然而,其他实施例可以包括安装到飞行器的机身、机尾或机头的飞行器发动机140。不管实施例如何,飞行器发动机140都可以通过一个或多个推力连杆260、262安装,该一个或多个推力连杆260、262在一端连接到飞行器(例如,机翼138),而在相对端连接到横杆250的孔251。横杆250进一步包括槽252,该槽252被配置为接收枢轴销253,该枢轴销253通过致动器254可控地定位在槽252内。致动器254可以联接到飞行器发动机140,使得致动器254的伸展和缩回会调节枢轴销253在槽252内的位置。改变枢轴销253在槽252内的位置会调节横杆250的铰链点。此外,改变横杆250的铰链点会改变沿着推力连杆260、262中的每一个的力分布,这又会增加或减少扭矩m的量(例如,扭矩的方向由箭头230描绘)。第一推力连杆260在距附接到相同机翼的第二推力连杆262预定距离“d”处附接到机翼。横杆的孔251彼此之间具有预定间距,该
预定间距限定了附接推力连杆260、262的相对端的长度“l”。此外,当移动枢轴销253时,通过致动器254的伸展或缩回,枢轴销253从中心线“c”移位距离“δ”。因此,沿着第一推力连杆260的推力可以用以下等式表示:并且沿着第二推力连杆262的推力可以类似地用以下等式表示:“推力”是由飞行器发动机140产生的推力值。扭矩(例如,由箭头230描绘的)可以由以下等式确定:在一些实施例中,当时,转子(例如,轴209)可以生成约3-5密耳、约3密耳、约4密耳或约5密耳的偏移。例如,将致动器调节到确定的致动器位置可以使枢轴销从中心线“c”移位横杆的孔之间的长度“l”的约2%、3%、4%、5%、6%、7%、8%、9%、10%、11%、12%,13%,14%或15%。然而,这仅仅是一个示例,因为可以通过将横杆的孔251的间距“l”配置为更小或更大,附接到机翼138的推力连杆260、262之间的距离“d”和动态地改变枢轴销253距中心线“c”的位移“δ”来实现转子的更大或更小偏移。
45.现在应该理解调节枢轴销253如何改变横杆250的铰链点并影响飞行器发动机140内的扭矩“m”和间隙。现在,图3-4将描绘和描述如何确定和控制枢轴销253距中心线“c”的位移“δ”的量,以便在发动机飞行器140的操作期间(例如,在飞行期间)动态调节飞行器发动机140内的间隙,以更好地使转子(例如,轴209)和定子226居中。
46.参考图3,描述了根据一个或多个实施例的包括用于优化飞行器发动机140内的间隙的电子控制单元300的发动机控制系统136的功能框图。发动机控制系统136接收各种输入,包括由飞行器上的一个或多个传感器350产生的信号。传感器输入可以包括来自飞行器发动机140的风扇速度传感器152、飞行器发动机140内的温度传感器154以及被配置为对飞行器的外部环境进行采样的那些传感器、压力传感器156、横风传感器158和其他飞行器传感器的信号。其他飞行器传感器中的一些可以包括能够确定攻角、发动机推力、绕组扭矩、惯性、角速率、角速度等的传感器。传感器信号中选择的一些可以馈送到中心线偏移模型400,这将参考图4更详细地描述,以预测在感测到的操作条件下飞行器发动机内的实时间隙,其最终用于确定与枢轴销253距中心线“c”的位移“δ”的量对应的致动器位置,该致动器位置将偏移传递到轴209和/或定子226,从而改善转子叶片尖端216和定子226之间的间隙以改善sfc并防止它们之间的摩擦。
47.根据本文所示和描述的实施例,发动机控制系统136包括电子控制单元300,该电子控制单元300可以利用硬件、软件和/或固件来优化飞行器发动机内的间隙。虽然在一些实施例中,电子控制单元300可以被配置为具有必要的硬件、软件和/或固件的通用计算机,但在一些实施例中,电子控制单元300可以被配置为专门设计用于执行本文描述的功能的专用计算机。
48.也如图3所示,电子控制单元300可以包括处理器330、输入/输出硬件332、网络接口硬件334、数据存储部件336(其存储模拟飞行数据338a、实时飞行数据338b、致动器位置338c和间隙值338d)和存储器部件340。存储器部件340可以是机器可读存储器(其也可以称为非暂时性处理器可读存储器)。存储器部件340可以被配置为易失性和/或非易失性存储器,并且因此可以包括随机存取存储器(包括sram、dram和/或其他类型的随机存取存储
器)、闪存存储器、寄存器、光盘(cd)、数字多功能光盘(dvd)和/或其他类型的存储部件。此外,存储器部件240可以被配置为存储操作逻辑242,以及用于实施中心线偏移模型400和致动器位置逻辑440(作为示例,它们中的每一个都可以实施为计算机程序、固件或硬件)的逻辑。本地接口346也可以包括在图3中并且可以实施为总线或其他接口,以促进电子控制单元300的部件中的通信。
49.处理器330可以包括被配置为接收和执行编程指令(例如来自数据存储部件336和/或存储器部件340)的任何处理部件。指令可以是存储在数据存储部件336和/或存储器部件340中的机器可读指令集的形式。输入/输出硬件332可以包括监视器、键盘、鼠标、打印机、照相机、麦克风、扬声器和/或其他用于接收、发送和/或呈现数据的装置。网络接口硬件334可以包括任何有线或无线网络硬件,例如调制解调器、lan端口、wi-fi卡、wimax卡、移动通信硬件和/或用于与其他网络和/或装置通信的其他硬件。
50.应当理解,数据存储部件336可以驻留在电子控制单元300本地和/或远离电子控制单元300,并且可以被配置为存储一条或多条数据以供电子控制单元300和/或其他部件访问。如图3所示,数据存储部件336存储模拟飞行数据338a。模拟飞行数据338a可以包括飞行器发动机在各种操作条件和飞行路径参数下的模拟数据。模拟飞行数据338a还可以包括飞行数据、传感器读数和来自先前飞行的测量间隙值。模拟飞行数据338a可用于训练中心线偏移模型400、机器学习模型,例如被配置为预测飞行器发动机140内的间隙的神经网络。数据存储部件336还可包括实时飞行数据338b,其可以包括通过从一个或多个传感器350接收的信号或可能影响飞行器发动机140的操作的预定义飞行参数获得的数据。虽然在一些实施例中,从一个或多个传感器350接收的信号可以直接馈送到中心线偏移模型400,但是可以存在记录实时飞行数据以供发动机控制系统136将来使用或用于在中心线偏移模型400的训练过程期间进行验证的实施例。
51.数据存储部件336还可以包括致动器位置338c。致动器位置338c可以是一组预设值,该组预设值基于致动器254、横杆250和飞行器发动机140的实施来限定致动器254的操作范围。换句话说,这些可以是校准值,该校准值限定相对于枢轴销253在横杆250的槽252内的位置的致动器臂的伸展和缩回位置之间的关系。例如,致动器臂伸展距离“x”可对应于枢轴销253在横杆的槽252内远离中心线“c”的位移位置“δ”。也就是说,枢轴销253在横杆250的槽252内的位置限定了横杆250的铰链点。
52.数据存储部件336还可以包括间隙值338d。间隙值338d包括在操作期间由中心线偏移模型400生成的预测值。间隙值338d可以限定为轴209相对于飞行器发动机的中心线“c”的横向移动的量和方向。由中心线偏移模型400预测的间隙值338d可以由致动器位置逻辑440使用。基于飞行器发动机的轴209的预测的当前间隙值338d的致动器位置逻辑440确定枢轴销253应该定位以调节轴209补偿(即,克服或抵消)扭矩“m”的位置,该扭矩“m”会导致轴209偏离中心线“c”的程度大于可接受程度。换言之,如果飞行器发动机140的操作条件将导致发动机内的间隙减小到低于可接受的预定值(例如,小于8密耳),则致动器254可以使枢轴销253重新定位,使得轴209的横向运动可以将间隙保持在飞行器发动机140的可接受范围内(例如,大于或等于8密耳)。
53.包括在存储器部件340中的是操作逻辑342,以及用于实施中心线偏移模型400和致动器位置逻辑440的逻辑。操作逻辑342可以包括用于管理电子控制单元300的部件的操
作系统和/或其他软件。下面参照图4更详细地描述中心线偏移模型400。如上所述,致动器位置逻辑440包括用于基于预测的当前间隙值338d确定枢轴销253的位置的逻辑,该预测的当前间隙值338d考虑(即,克服或抵消)将导致轴209偏离中心线“c”的程度大于可接受程度的扭矩“m”。
54.该系统实施机器学习模型,该机器学习模型被训练以基于接收到的飞行数据来预测飞行器发动机内的一个或多个间隙值。如本文所用,术语“机器学习模型”指的是一个或多个数学模型,其被配置为在数据中寻找模式并将确定的模式应用于新数据集以形成预测。根据要解决的问题的性质以及数据的类型和容积,实施不同的方法,也称为机器学习的类别。机器学习模型的类别包括例如监督学习、无监督学习、强化学习、深度学习或其组合。
55.监督学习利用目标或结果变量,例如从给定的一组预测量中预测的因变量,也称为自变量。这些变量集用于生成将标记输入映射到所需输出的函数。训练过程是迭代的,并一直持续到模型在训练数据上达到期望的准确度水平。分类为监督学习算法和模型的机器学习模型包括例如神经网络、回归、决策树、随机森林、k-最近邻(knn)、逻辑回归等等。
56.与监督学习不同,无监督学习是一种不使用标记数据的学习算法,从而让它从输入中确定结构。换句话说,无监督学习的目标是通过例如聚类的方法找到数据中隐藏的模式。无监督学习的一些示例包括先验(apriori)算法或k-均值(means)。强化学习指的是经过训练以做出特定决策的机器学习模型。机器学习模型暴露在通过使用试错法不断地训练自己的环境中。这样的模型从过去的经验中学习,并试图获取尽可能最好的知识来做出准确的业务决策。强化学习的示例包括马尔可夫决策过程。
57.深度学习是一种机器学习方法,它在连续层中结合神经网络,以迭代方式从数据中学习。深度学习可以从非结构化数据中学习模式。深度学习算法重复执行一项任务,并通过支持渐进式学习的深层逐步改善结果。深度学习可以包括监督学习或无监督学习方面。一些深度学习机器学习模型有,例如人工神经网络(ann)、卷积神经网络(cnn)、循环神经网络(rnn)、长短期记忆/门控循环单元(gru)、自组织映射(som)、自动编码器(ae)和受限玻尔兹曼机(rbm)。
58.机器学习模型被理解为表示具有至少一个非线性操作(例如,在神经网络的情况下为非线性激活层)的任何种类的数学模型。通过最小化与模型本身分离的一个或多个损失函数(例如,最小化交叉熵损失或负对数似然)来训练或优化机器学习模型。训练或优化过程旨在优化模型以重现已知结果(低偏差),并使模型能够从看不见的经验中做出准确的预测(低方差)。模型的输出可以是与任务相关的各种事物,例如预测值、分类、序列等等。在本实施例中,输出可以是间隙值和/或与预测间隙值相关联的置信水平。
59.现在参考图4,描绘了根据一个或多个实施例的用于控制可变推力连杆横杆的枢转位置以优化飞行器发动机内的间隙的说明性系统图。图4中描绘的说明性系统示出了实施的机器学习模型是神经网络模型的实施例。然而,应当理解,神经网络模型的利用仅仅是机器学习模型的一个示例,该机器学习模型被训练以基于接收到的飞行数据来预测飞行器发动机内的一个或多个间隙值。该系统包括实施本文中称为中心线偏移模型400的神经网络模型,以预测在当前操作条件下飞行器发动机内的间隙值338d,例如实时飞行数据338b,其包括来自飞行器的一个或多个传感器350的信号。致动器位置逻辑440利用在当前操作条件下将产生的预测的间隙值338d来确定将偏移全部或部分预测的间隙值338d(即,轴偏移)
的枢轴销253位置,该枢轴销253位置导致转子叶片尖端216和定子226之间的对准小于最佳对准。换言之,致动器位置逻辑440确定优化转子叶片尖端216和定子226的对准的枢轴销253位置,使得它们在水平方向(y轴,图2a和2b)上更好地居中。
60.在训练模式中,模拟飞行数据338a用于向中心线偏移模型400提供操作条件和模拟传感器读数。中心线偏移模型400可以使用监督或无监督方法训练,可选地使用反馈回路来调节中心线偏移模型400的节点的权重,以在实际操作条件下实现对间隙值338d的准确预测。
61.中心线偏移模型400(例如,神经网络)可以包括一个或多个层405、410、415、420,具有一个或多个节点401,上述节点通过节点连接402连接。一个或多个层405、410、415、420可以包括输入层405、一个或多个隐藏层410、415和输出层420。中心线偏移模型400可以是深度神经网络、卷积神经网络或其他类型的神经网络。中心线偏移模型400可以包括一个或多个卷积层和一个或多个全连接层。输入层405表示馈送到神经网络400的原始信息。例如,包括来自一个或多个传感器350的信号的实时飞行数据338b可以在输入层405处输入到中心线偏移模型400中。
62.实时飞行数据338b处理在输入层405通过节点401和节点连接402接收的原始信息。实时飞行数据338b可以是高度非线性的并且相互依赖于飞行机动条件。因此,机器学习模型可以系统地摄取非线性数据并确定可用于基于接收到的飞行数据338b预测飞行器发动机内的一个或多个间隙值的模式。例如,一个或多个隐藏层410、415,取决于来自输入层405的输入和节点连接402上的权重,执行计算活动。换言之,隐藏层410、415执行计算并将信息从输入层405通过它们的关联节点401和节点连接402传输到输出层420。
63.通常,当中心线偏移模型400正在学习时,中心线偏移模型400正在识别和确定在输入层405处接收的原始信息内的模式。作为响应,一个或多个参数,例如,与节点401之间的节点连接402相关联的权重,可以通过称为反向传播的处理来调节。应该理解,学习可能发生的过程有很多种,但是,两个一般的学习过程包括关联映射和规律性检测。关联映射指的是中心线偏移模型400学习以在输入集上产生特定模式而无论何时在输入集上应用另一个特定模式的学习过程。规律性检测指的是神经网络学习以响应输入模式的特定属性的学习过程。在关联映射中,神经网络存储模式之间的关系,而在规律性检测中,每个单元的响应具有特定的“意义”。这种类型的学习机制可以用于特征发现和知识表示。
64.神经网络通过前向和后向传播来学习以更新权重和偏差,从而拟合训练数据。信息存储在神经网络的权重矩阵w中。学习是通过优化权重来完成的。根据执行学习的方式,可以区分两大类神经网络:1)权重不能改变的固定网络(即dw/dt=0),以及2)能够改变其权重的自适应网络(即dw/dt不=0)。在固定网络中,权重是根据要解决的问题先验固定的。
65.为了训练中心线偏移模型400以执行任务,对权重的调节以减小期望输出和实际输出之间的误差的方式进行。该过程可能需要中心线偏移模型400计算权重的误差导数(ew)。换句话说,它必须计算误差如何随着每个权重的轻微增加或减少而变化。反向传播算法是一种用于确定ew的方法。
66.该算法通过首先计算误差导数(ea)、误差随着单元的活动水平改变而改变的速率来计算每个ew。对于输出单元,ea只是实际输出与期望输出之间的差。要计算输出层之前层中隐藏单元的ea,首先要识别该隐藏单元与其连接的输出单元之间的所有权重。然后,将这
些权重乘以这些输出单元的ea,并将这些乘积相加。这个总和等于所选隐藏单元的ea。在计算输出层之前隐藏层中所有ea之后,以类似方式,可以计算其他层的ea,以与活动通过中心线偏移模型400传播的方式相反的方向从层移动到层,因此“反向传播”。一旦针对单元已经计算了ea,就可以直接计算该单元的每个传入连接的ew。ew是ea和通过传入连接的活动的乘积。应当理解,这只是训练中心线偏移模型400以执行任务的一种方法。
67.仍然参考图4,中心线偏移模型400可以包括一个或多个隐藏层410、415,它们馈送到输出层420的一个或多个节点401。取决于配置中心线偏移模型400而生成的特定输出,可以存在一个或多个输出层420。在本实施例中,输出可以包括与飞行器发动机140内的部件相对于中心线“c”的水平或横向移动的量相关的预测的间隙值338d。
68.如上所述,预测的间隙值338d然后被致动器位置逻辑440用来确定致动器位置338c,该致动器位置338c优化了横杆250的铰链位置以提供优化的定子和转子的间隙。
69.本文描述的功能框和/或流程图元素可以被翻译成机器可读指令。作为非限制性示例,机器可读指令可以使用任何编程协议来编写,例如:要解析的描述性文本(例如,例如超文本标记语言、可扩展标记语言等),(ii)汇编语言,(iii)由编译器从源代码生成的目标代码,(iv)使用任何合适编程语言的语法编写的源代码,供解释器执行,(v)供即时编译器编译和执行的源代码等等。可替换地,机器可读指令可以用硬件描述语言(hdl)编写,例如通过现场可编程门阵列(fpga)配置或专用集成电路(asic)或它们的等价物实现的逻辑。因此,本文描述的功能可以以任何传统的计算机编程语言、作为预编程的硬件元件,或作为硬件和软件部件的组合来实现。
70.图5描绘了图示根据本文描述的一个或多个实施例通过优化定子和转子在水平(横向)方向上的居中来减少间隙的图表。该图表使用短虚线描绘了预测的间隙值。最佳间隙用长虚线表示。在操作中,中心线偏移模型400将预测预测的间隙值,并且致动器位置逻辑440将确定枢轴销253在横杆250的槽252内的调节和新位置,以将预测的实时间隙值调节到至少在水平方向上以最佳间隙更好地居中。
71.现在参考图6,描绘了图示根据一个或多个实施例的飞行器发动机的高压压缩机的多级的间隙减小的图表。应当理解,虽然本公开描述了参考优化对准和更好地使飞行器发动机140的压缩机206部分内的间隙居中的系统和方法,但是相同的系统和方法可以应用于优化风扇142、燃烧器208、涡轮210或飞行器发动机140的其他区段内的间隙。此外,已知压缩机206可以包括多级并且每级包括具有转子叶片尖端216的叶片,该转子叶片尖端216与定子226(例如,静止轮叶)有间隙。图6中描绘的图表描绘了在如本文所描绘和描述的那样实施对横杆250在飞行器发动机140内的动态控制时每级产生的间隙。也就是说,通过实施对横杆250的动态控制,冷间隙可以从“基线”值减小以改进sfc和发动机效率,因为发动机以较少的开放间隙运行。
72.现在应该理解,本公开涉及用于通过控制横杆连杆的铰链位置来调节叶片尖端间隙目标的系统和方法。在一个实施例中,具有至少一个孔的横杆联接到一个或多个推力连杆,该一个或多个推力连杆可以进一步联接到飞机机翼和/或机身。横杆还包括限定铰链点的槽。包括枢轴销的致动器可滑动地联接在横杆的槽内。由致动器产生的运动调节了枢轴销在横杆的槽内的位置,从而改变了横杆的铰链点。被配置为捕获实时飞行数据的一个或多个传感器生成信号并将信号发送到通信地联接到致动器的电子控制单元。电子控制单元
被配置为从一个或多个传感器接收飞行数据,实施经过训练以基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型,利用机器学习模型,基于接收到的飞行数据预测在飞行器发动机内的一个或多个间隙值,基于一个或多个间隙值确定致动器位置;并使致动器调节到确定的致动器位置。
73.对本领域技术人员将显而易见的是,可以在不背离本公开的精神或范围的情况下进行各种修改和变化。由于本领域技术人员可以想到结合本公开的精神和实质的所公开实施例的修改、组合、子组合和变化,因此本公开应被解释为包括在所附权利要求及其等价物的范围内的所有内容。
74.本发明的进一步方面由以下条项的主题提供:
75.一种用于优化飞行器发动机内的间隙的系统,包括:可调节联接器,可调节联接器被配置为将推力连杆联接到飞行器发动机;致动器,致动器联接到可调节联接器,其中由致动器产生的运动调节可调节联接器的铰链点;一个或多个传感器,一个或多个传感器被配置为捕获实时飞行数据;和电子控制单元,电子控制单元通信地联接到致动器和一个或多个传感器。电子控制单元被配置为:从一个或多个传感器接收飞行数据,实施被训练以基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型,利用机器学习模型,基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值,基于一个或多个间隙值确定致动器位置,和使致动器调节到确定的致动器位置。
76.根据前述条项中任一项所述的系统,其中,飞行器发动机内的一个或多个间隙值限定轴相对于飞行器发动机的中心线的横向运动。
77.根据前述条项中任一项所述的系统,其中,电子控制单元被配置为生成控制信号并将控制信号传输到致动器,以将致动器调节到确定的致动器位置。
78.根据前述条项中任一项所述的系统,其中,可调节联接器包括用于联接到推力连杆的至少一个孔和限定可调节联接器的铰链点的槽,将致动器调节到确定的致动器位置使可滑动地联接在槽内的枢轴销从中心线“c”移位可调节联接器的孔之间的长度“l”的约10%。
79.根据前述条项中任一项所述的系统,其中,将致动器调节到确定的致动器位置使枢轴销从中心线“c”移位可调节联接器的孔之间的长度“l”的约5%。
80.根据前述条项中任一项所述的系统,其中,一个或多个传感器包括风扇速度传感器、温度传感器、压力传感器或横风传感器中的至少一个。
81.根据前述条项中任一项所述的系统,其中,将致动器调节到确定的致动器位置将一个或多个间隙值改进3至5密耳。
82.一种用于优化飞行器发动机内的间隙的方法,包括:利用电子控制单元,从一个或多个传感器接收飞行数据;利用电子控制单元,实施被训练以基于飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型;利用机器学习模型,基于飞行数据预测飞行器发动机内的一个或多个间隙值;利用电子控制单元,基于一个或多个间隙值确定致动器位置;和利用电子控制单元,使致动器调节到确定的致动器位置。
83.根据前述条项中任一项所述的方法,其中,致动器调节枢轴销在可调节联接器的槽内的位置,从而改变可调节联接器的铰链点。
84.根据前述条项中任一项所述的方法,进一步包括:利用电子控制单元,生成用于将
致动器调节到确定的致动器位置的控制信号。
85.根据前述条项中任一项所述的方法,其中,将致动器调节到确定的致动器位置使可滑动地联接在槽内的枢轴销从中心线“c”移位可调节联接器的孔之间的长度“l”的约10%。
86.根据前述条项中任一项所述的方法,其中,将致动器调节到确定的致动器位置使枢轴销从中心线“c”移位可调节联接器的孔之间的长度“l”的约5%。
87.根据前述条项中任一项所述的方法,其中,一个或多个传感器包括风扇速度传感器、温度传感器、压力传感器或横风传感器中的至少一个。
88.根据前述条项中任一项所述的方法,其中,将致动器调节到确定的致动器位置将一个或多个间隙值改进3至5密耳。
89.一种飞行器,包括:飞行器发动机,飞行器发动机利用至少一个推力连杆和可调节联接器联接到机翼,其中可调节联接器包括用于联接到至少一个推力连杆的至少一个孔和限定可调节联接器的铰链点的槽;致动器,致动器包括可滑动地联接在槽内的枢轴销,其中由致动器产生的运动调节枢轴销在槽内的位置,从而改变可调节联接器的铰链点;一个或多个传感器,一个或多个传感器被配置为捕获实时飞行数据;和电子控制单元,电子控制单元通信地联接到致动器和一个或多个传感器。电子控制单元被配置为:从一个或多个传感器接收飞行数据,实施被训练以基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值的机器学习模型,利用机器学习模型,基于接收到的飞行数据预测飞行器发动机内的一个或多个间隙值,基于一个或多个间隙值确定致动器位置,和使致动器调节到确定的致动器位置。
90.根据前述条项中任一项所述的飞行器,其中,电子控制单元被配置为生成控制信号并将控制信号传输到致动器,以将致动器调节到确定的致动器位置。
91.根据前述条项中任一项所述的飞行器,其中,将致动器调节到确定的致动器位置使枢轴销从中心线“c”移位可调节联接器的孔之间的长度“l”的约10%。
92.根据前述条项中任一项所述的飞行器,其中,将致动器调节到确定的致动器位置使枢轴销从中心线“c”移位可调节联接器的孔之间的长度“l”的约5%。
93.根据前述条项中任一项所述的飞行器,其中,一个或多个传感器包括风扇速度传感器、温度传感器、压力传感器或横风传感器中的至少一个。
94.根据前述条项中任一项所述的飞行器,其中,将致动器调节到确定的致动器位置将一个或多个间隙值改进3至5密耳。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。