1.本实用新型涉及橡胶鱼鳍驱动件领域,特别涉及一种橡胶鱼鳍驱动连接件。
背景技术:
2.目前,对于mpf推进方式的仿生机器人主要推进部位是由鳍条、橡胶鱼鳍组成,将射线鳍条固定于橡胶鱼鳍上,通过电机及机械构件从而驱动鳍条摆动,进而驱动橡胶鱼鳍摆动;
3.但是由于上述驱动方式需要通过电机带动多根组合连杆的多部件构成,会导致机器体积增大,空间利用效率低,维护成本较高。
技术实现要素:
4.本实用新型的主要目的在于提供一种橡胶鱼鳍驱动连接件,可以有效解决背景技术中的技术问题。
5.为实现上述目的,本实用新型采取的技术方案为:
6.一种橡胶鱼鳍驱动连接件,包括橡胶鱼鳍和舵机,所述舵机的底部安装有耳座,所述橡胶鱼鳍与舵机之间设有连接结构,连接结构包括连接座和摆臂,所述连接座的一端安装有连接条,所述舵机的一侧安装有输出齿,所述摆臂的一侧表面靠近一端位置开设有连接齿槽,所述舵机通过输出齿与连接齿槽连接。
7.作为本实用新型的进一步方案,所述摆臂与输出齿之间设有垫环,所述摆臂的一侧表面靠近另一端位置开设有插孔。
8.作为本实用新型的进一步方案,所述连接座的一侧表面开设有连接槽,所述连接槽的内侧开设有第一连接孔和第二连接孔。
9.作为本实用新型的进一步方案,所述第一连接孔与摆臂、连接齿槽和输出齿之间通过螺栓连接,所述第二连接孔与插孔之间同样通过螺栓连接。
10.作为本实用新型的进一步方案,所述连接槽与摆臂适应性匹配,所述插孔和第一连接孔均一字排列设置四个。
11.作为本实用新型的进一步方案,所述连接条与橡胶鱼鳍之间设有u形槽,且连接条的上表面开设用鱼鳍连接孔,所述鱼鳍连接孔与橡胶鱼鳍之间同样贯穿有螺栓。
12.本实用新型的有益效果如下:
13.通过设置,连接座、连接条、摆臂配合连接槽,采用舵机驱动摆臂的方式,替代了传统电机驱动多根旋杆的机械构件驱动方式,结构更加简单,降低机器维护成本,而且整体结构紧凑,提高机器空间利用效率,同时通过设置插孔配合第一连接孔,提高了摆臂与连接座连接的便捷性,而且连接槽与摆臂适应性匹配,在连接后可有效增加摆臂与连接座之间的稳定性。
附图说明
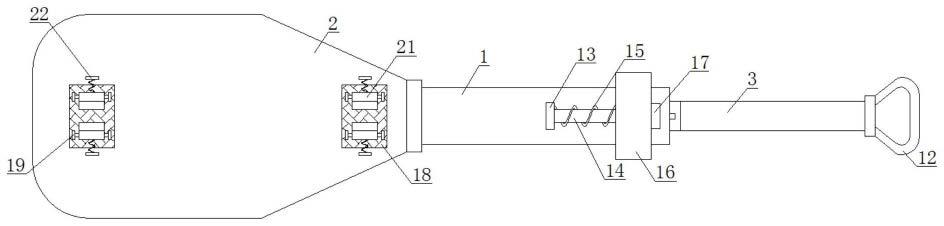
14.图1为本实用新型一种橡胶鱼鳍驱动连接件的整体结构示意图;
15.图2为本实用新型一种橡胶鱼鳍驱动连接件的舵机和连接座放大图;
16.图3为本实用新型一种橡胶鱼鳍驱动连接件的舵机和连接座拆分图;
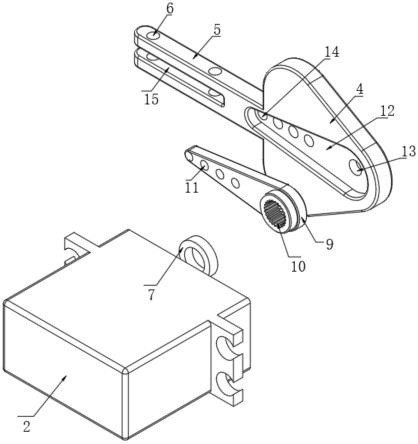
17.图4为本实用新型一种橡胶鱼鳍驱动连接件的图3的立体结构图。
18.图中:1、橡胶鱼鳍;2、舵机;3、耳座;4、连接座;5、连接条;6、鱼鳍连接孔;7、垫环;8、输出齿;9、摆臂;10、连接齿槽;11、插孔;12、连接槽;13、第一连接孔;14、第二连接孔;15、u形槽。
具体实施方式
19.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
20.如图1-4所示,一种橡胶鱼鳍驱动连接件,包括橡胶鱼鳍1和舵机2,舵机2的底部安装有耳座3,橡胶鱼鳍1与舵机2之间设有连接结构,连接结构包括连接座4和摆臂9,连接座4的一端安装有连接条5,舵机2的一侧安装有输出齿8,摆臂9的一侧表面靠近一端位置开设有连接齿槽10,舵机2通过输出齿8与连接齿槽10连接。
21.本实施例中,摆臂9与输出齿8之间设有垫环7,摆臂9的一侧表面靠近另一端位置开设有插孔11。
22.垫环7阻隔在摆臂9与舵机2之间,在舵机2工作时能够起到减少摩擦的作用。
23.本实施例中,连接座4的一侧表面开设有连接槽12,连接槽12的内侧开设有第一连接孔13和第二连接孔14。
24.连接槽12能够起到与摆臂9连接的作用,第一连接孔13和第二连接孔14则能够起到穿过螺栓进行固定的作用。
25.本实施例中,第一连接孔13与摆臂9、连接齿槽10和输出齿8之间通过螺栓连接,第二连接孔14与插孔11之间同样通过螺栓连接。
26.将摆臂9通过连接齿槽10连接在输出齿8的外部,当舵机2工作时,可通过输出齿8带动摆臂9动作,从而通过连接条5带动橡胶鱼鳍1摆动,在水下实现仿生鱼游的方式运行。
27.本实施例中,连接槽12与摆臂9适应性匹配,插孔11和第一连接孔13均一字排列设置四个。
28.四个插孔11与四个第一连接孔13之间可用于贯穿螺栓,从而将摆臂9与连接座4连接在一起。
29.本实施例中,连接条5与橡胶鱼鳍1之间设有u形槽15,且连接条5的上表面开设用鱼鳍连接孔6,鱼鳍连接孔6与橡胶鱼鳍1之间同样贯穿有螺栓。
30.u形槽15起到夹紧橡胶鱼鳍1的作用。
31.需要说明的是,本实用新型为一种橡胶鱼鳍驱动连接件,在使用时,将连接条5通过u形槽15卡在橡胶鱼鳍1的外部,使用外部螺栓贯穿鱼鳍连接孔6和橡胶鱼鳍1,将橡胶鱼鳍1与连接条5连接固定,然后将摆臂9卡入到连接槽12的内部,使用外部螺栓贯穿插孔11和第二连接孔14,将摆臂9与连接座4连接固定,将垫环7套设在输出齿8的外部,再将舵机2通过输出齿8插入到连接齿槽10的内部,最后通过外部螺栓穿过第一连接孔13与输出齿8螺纹
连接,从而将舵机2与摆臂9连接,最后通过耳座3将舵机2安装在仿生机器人上,在舵机2工作的时候,输出齿8摆动,通过摆臂9带动连接座4工作,从而带动连接条5摆动,使得橡胶鱼鳍1摆动,在橡胶鱼鳍1的边缘设置至少12组舵机2、连接座4、摆臂9,使得橡胶鱼鳍1以仿生鱼的方式摆动,即可在水下游动,实现仿生运动。
32.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种橡胶鱼鳍驱动连接件,其特征在于:包括橡胶鱼鳍(1)和舵机(2),所述舵机(2)的底部安装有耳座(3),所述橡胶鱼鳍(1)与舵机(2)之间设有连接结构,连接结构包括连接座(4)和摆臂(9),所述连接座(4)的一端安装有连接条(5),所述舵机(2)的一侧安装有输出齿(8),所述摆臂(9)的一侧表面靠近一端位置开设有连接齿槽(10),所述舵机(2)通过输出齿(8)与连接齿槽(10)连接。2.根据权利要求1所述的一种橡胶鱼鳍驱动连接件,其特征在于:所述摆臂(9)与输出齿(8)之间设有垫环(7),所述摆臂(9)的一侧表面靠近另一端位置开设有插孔(11)。3.根据权利要求1所述的一种橡胶鱼鳍驱动连接件,其特征在于:所述连接座(4)的一侧表面开设有连接槽(12),所述连接槽(12)的内侧开设有第一连接孔(13)和第二连接孔(14)。4.根据权利要求3所述的一种橡胶鱼鳍驱动连接件,其特征在于:所述第一连接孔(13)与摆臂(9)、连接齿槽(10)和输出齿(8)之间通过螺栓连接,所述第二连接孔(14)与插孔(11)之间同样通过螺栓连接。5.根据权利要求4所述的一种橡胶鱼鳍驱动连接件,其特征在于:所述连接槽(12)与摆臂(9)适应性匹配,所述插孔(11)和第一连接孔(13)均一字排列设置四个。6.根据权利要求1所述的一种橡胶鱼鳍驱动连接件,其特征在于:所述连接条(5)与橡胶鱼鳍(1)之间设有u形槽(15),且连接条(5)的上表面开设用鱼鳍连接孔(6),所述鱼鳍连接孔(6)与橡胶鱼鳍(1)之间同样贯穿有螺栓。
技术总结
本实用新型公开了一种橡胶鱼鳍驱动连接件,包括橡胶鱼鳍和舵机,所述舵机的底部安装有耳座,所述橡胶鱼鳍与舵机之间设有连接结构,连接结构包括连接座和摆臂,所述连接座的一端安装有连接条,所述舵机的一侧安装有输出齿,所述摆臂的一侧表面靠近一端位置开设有连接齿槽。本实用新型所述的一种橡胶鱼鳍驱动连接件,采用舵机驱动摆臂的方式,替代了传统电机驱动多根旋杆的机械构件驱动方式,结构更加简单,降低机器维护成本,而且整体结构紧凑,提高机器空间利用效率,同时通过设置插孔配合第一连接孔,提高了摆臂与连接座连接的便捷性,而且连接槽与摆臂适应性匹配,在连接后可有效增加摆臂与连接座之间的稳定性。增加摆臂与连接座之间的稳定性。增加摆臂与连接座之间的稳定性。
技术研发人员:马恺君 潘洪鹏 杨贵明 李建豪 丛扬
受保护的技术使用者:郑州大学
技术研发日:2022.09.21
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。