1.本实用新型涉及探测技术领域,特别是涉及一种具有嗅觉装置的探测机器人。
背景技术:
2.随着探测技术的发展,出现了探测机器人,探测机器人能够对周边的环境进行探测,以提供准确、可靠的监测数据和资料。传统技术中,探测机器人一般采用视觉分辨的方式对周边的环境进行探测,然而,采用视觉分辨的方式,仅能通过物体的外形判断物体的数据和资料,存在探测机器人监测数据不精准的问题。
技术实现要素:
3.基于此,有必要针对探测机器人监测数据不精准的问题,提供一种具有嗅觉装置的探测机器人。
4.一种具有嗅觉装置的探测机器人,包括:
5.移动装置;移动装置包括机身、轮组及摄像头,轮组为两个,两个轮组分别安装于机身的两侧,摄像头安装于机身的一端;及
6.连接移动装置的嗅觉装置;嗅觉装置包括壳体、滤网、风扇及嗅觉感应组件,壳体与机身连接,壳体具有依次连通的入气口、腔体及出气口;滤网、风扇及嗅觉感应组件均安装于腔体内,滤网设置于靠近入气口的一端,风扇设置于滤网背离入气口的一端,嗅觉感应组件设置于风扇和出气口之间。
7.上述具有嗅觉装置的探测机器人,通过摄像头锁定待检测物体的位置后,轮组带动机身移动至待检测物体旁,然后通过风扇将待检测物体周围的空气经过入气口抽入腔体内,空气再由腔体内的滤网过滤杂质后由嗅觉感应组件检测空气中的质量,检测后的空气最后从出气口排出,从而实现对待检测物体的外观及气味进行检测。通过上述设计,采用摄像头锁定待检测物体的位置后,通过风扇及滤网的配合将待检测物体周围的空气吸入嗅觉感应组件处进行检测的方式,利于避免杂质影响嗅觉感应组件对气味的检测,同时检测后的空气由出气口排出,能够避免空气滞留在腔体内对下一个待检测物体的检测精度造成影响,从而达到提升监测数据精度的目的。
8.在其中一个实施例中,入气口为条形状。
9.在其中一个实施例中,入气口为多个,多个入气口沿壳体的宽度方向排列。
10.在其中一个实施例中,出气口为锥形状,出气口朝远离腔体的方向逐渐收缩。
11.在其中一个实施例中,壳体还设有第一安装槽,滤网滑动安装于第一安装槽内。
12.在其中一个实施例中,嗅觉装置还包括安装于壳体内的安装块,安装块与风扇连接,且安装块设有与风扇对应的出风口。
13.在其中一个实施例中,壳体设有与安装块配合的第二安装槽,安装块滑动设置于第二安装槽内。
14.在其中一个实施例中,风扇为多个,多个风扇均安装于安装块上。
15.在其中一个实施例中,嗅觉感应组件包括电路板、空气质量传感器、氨气传感器、酒精传感器、可燃气体传感器及硫化氢传感器,空气质量传感器、氨气传感器、酒精传感器、可燃气体传感器及硫化氢传感器均安装于电路板上。
16.在其中一个实施例中,空气质量传感器为tgs2600空气质量传感器。
17.在其中一个实施例中,氨气传感器为tgs826氨气传感器。
18.在其中一个实施例中,酒精传感器为tgs822酒精传感器。
19.在其中一个实施例中,可燃气体传感器为tgs2611可燃气体传感器。
20.在其中一个实施例中,硫化氢传感器为tgs825化氢传感器。
21.在其中一个实施例中,移动装置还包括连接摄像头的照明件。
附图说明
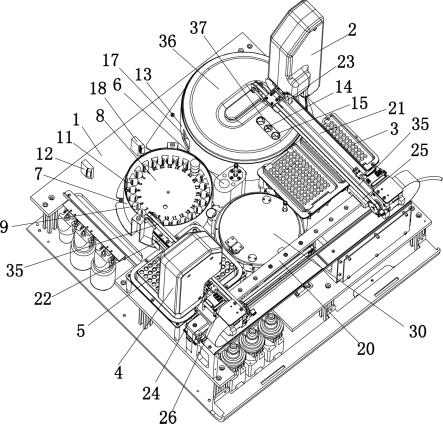
22.图1为本实用新型的一种实施例所示的具有嗅觉装置的探测机器人的结构示意图;
23.图2为图1所示的具有嗅觉装置的探测机器人的嗅觉装置的结构示意图;
24.图3为图2所示的嗅觉装置的分解示意图。
25.附图中标号的含义为:
26.100、具有嗅觉装置的探测机器人;
27.10、移动装置;11、机身;12、轮组;13、摄像头;14、照明件;
28.20、嗅觉装置;21、壳体;211、入气口;212、腔体;213、出气口;214、第一安装槽;215、第二安装槽;22、滤网;23、风扇;24、嗅觉感应组件;241、电路板;242、空气质量传感器;243、氨气传感器;244、酒精传感器;245、可燃气体传感器;246、硫化氢传感器;25、安装块;251、出风口。
具体实施方式
29.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
30.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
32.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
33.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
34.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
35.如图1至图3所示,其为本实用新型的一种实施例的具有嗅觉装置的探测机器人。
36.如图1至图3所示,该具有嗅觉装置的探测机器人包括:移动装置10及连接移动装置10的嗅觉装置20。其中,移动装置10用于识别待检测物体的位置并移动到待检测物体旁,嗅觉装置20用于吸取待检测物体周围的空气从而对待检测物体的气味进行检测。采用移动装置10识别待检测物体的位置并移动到待检测物体旁,嗅觉装置20吸取待检测物体周围的空气从而对待检测物体的气味进行检测的方式,利于对待检测物体的外形及气味进行检测,达到提升检测精度的目的。
37.下文,结合图1至图3,对上述的具有嗅觉装置的探测机器人做进一步的说明。
38.在本实施例中,为了实现移动装置10能够识别待检测物体的位置并移动到待检测物体旁,如图1所示,移动包括机身11、轮组12及摄像头13,轮组12为两个,两个轮组12分别安装于机身11的两侧,摄像头13安装于机身11的一端。
39.进一步地,为了实现移动装置10能够在夜间工作,移动装置10还包括连接摄像头13的照明件14。具体地,照明件14为led灯。
40.在本实施例中,为了实现嗅觉装置20能够吸取待检测物体周围的空气从而对待检测物体的气味进行检测,如图2及图3所示,嗅觉装置20包括壳体21、滤网22、风扇23及嗅觉感应组件24,壳体21与机身11连接,壳体21具有依次连通的入气口211、腔体212及出气口213,其中,入气口211为条形状,滤网22、风扇23及嗅觉感应组件24均安装于腔体212内,滤网22设置于靠近入气口211的一端,风扇23设置于滤网22背离入气口211的一端,嗅觉感应组件24设置于风扇23和出气口213之间。具体地,入气口211为多个,多个入气口211沿壳体21的宽度方向排列。
41.如图3所示,具体地,壳体21还设有第一安装槽214,滤网22滑动安装于第一安装槽214内。
42.在本实施例中,为了便于安装风扇23,如图3所示,嗅觉装置20还包括安装于壳体21内的安装块25,安装块25与风扇23连接,且安装块25设有与风扇23对应的出风口251。风
扇23为多个,多个风扇23均安装于安装块25上。进一步地,壳体21设有与安装块25配合的第二安装槽215,安装块25滑动设置于第二安装槽215内。
43.在本实施例中,如图3所示,嗅觉感应组件24包括电路板241、空气质量传感器242、氨气传感器243、酒精传感器244、可燃气体传感器245及硫化氢传感器246,空气质量传感器242、氨气传感器243、酒精传感器244、可燃气体传感器245及硫化氢传感器246均安装于电路板241上。其中,空气质量传感器242为tgs2600空气质量传感器242。氨气传感器243为tgs826氨气传感器243。酒精传感器244为tgs822酒精传感器244。可燃气体传感器245为tgs2611可燃气体传感器245。硫化氢传感器246为tgs825化氢传感器。
44.在本实施例中,为了引导空气流出并且避免空气滞留在腔体212内,出气口213为锥形状,如图3所示,出气口213朝远离腔体212的方向逐渐收缩。
45.本实用新型的具有嗅觉装置的探测机器人的工作原理为:通过摄像头13锁定待检测物体的位置后,轮组12带动机身11移动至待检测物体旁,然后通过风扇23将待检测物体周围的空气经过入气口211抽入腔体212内,空气再由腔体212内的滤网22过滤杂质后由嗅觉感应组件24检测空气中的质量,检测后的空气最后从出气口213排出,从而实现对待检测物体的外观及气味进行检测。
46.本实用新型的具有嗅觉装置的探测机器人的有益效果为:采用摄像头13锁定待检测物体的位置后,通过风扇23及滤网22的配合将待检测物体周围的空气吸入嗅觉感应组件24处进行检测的方式,利于避免杂质影响嗅觉感应组件24对气味的检测,同时检测后的空气由出气口213排出,能够避免空气滞留在腔体212内对下一个待检测物体的检测精度造成影响,从而达到提升监测数据精度的目的。
47.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
48.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。