1.本实用新型属于堆场抓斗技术领域,具体涉及一种环保高效的自动化混合堆场的抓斗。
背景技术:
2.在水泥厂的生产转运过程中物料大都会进行堆放,形成独立的堆场,对堆场的物料装载最常用的就是抓斗,抓斗是指起重机抓取干散货物的专用工具。由两块或多块可启闭的斗状颚板合在一起组成容物空间,装料时使颚板在物料堆中闭合,物料被抓入容物空间,卸料时颚板在料堆上悬空状态下开启,物料散落在料堆上,颚板的开合一般由起重机起升机构钢丝绳操纵。抓斗作业无繁重体力劳动,可达到较高的装卸效率并确保安全,通过两组钢丝绳分别控制抓斗的开关和升降,以提高效率,抓斗单次抓取的物料较多,体重较大,在长时间的实用过程中,牵引绳可能会发生打滑或断裂现象,在抓斗内部存放大量的物料,因此在移动过程中发生事故的可能性较大,如果发生断裂或者打滑,抓斗会因为自身重量的原因自动打开,内部的物料发生倾斜,产生危险。
技术实现要素:
3.本实用新型的目的在于提供一种环保高效的自动化混合堆场的抓斗,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种环保高效的自动化混合堆场的抓斗,包括抓斗机构和限位自锁机构,所述抓斗机构包括斗体和主轴,所述斗体内部中空,所述斗体截面成扇形,所述斗体一端对称设置有延伸板,所述斗体上侧设置有安装横梁,所述斗体对称设置有两个,所述延伸板通过轴承对称安装在主轴外圆弧面,所述主轴表面通过轴承安装有活动滑轮,所述活动滑轮置于两个所述延伸板内侧,所述主轴两端对称设置有限位板,所述限位板置于斗体外侧,所述安装横梁上表面对称设置有连接座,两个所述连接座之间通过轴承安装有连接杆,所述限位自锁机构包括安装件和调整杆,所述安装件置于主轴正上方,所述安装件内侧下方设置有活动箱,所述活动箱内部中空,所述安装件两侧通过轴承对称安装有限位轴,所述连接杆背离连接座的一端通过轴承安装在限位轴表面,所述限位轴表面安装有限位齿轮,两个所述限位齿轮对称设置在活动箱的两侧,所述安装件内部下方通过轴承安装有转轴,所述转轴表面设置有导向滑轮,所述导向滑轮置于活动滑轮的正上方。
5.优选的,所述转轴表面安装有调整盘,所述调整盘表面均匀安装有调整弧板,所述调整杆滑动安装在活动箱的下主体上,且所述调整杆贯穿活动箱下主体。
6.优选的,多个所述调整弧板均滑动安装在调整盘的外表面,所述调整杆底端设置有弧形推板,所述弧形推板与调整弧板外表面相接触。
7.优选的,所述调整杆顶部通过轴承对称安装有连杆,所述连杆背离调整杆的一端通过销轴安装有限位杆。
8.优选的,所述限位杆贯穿活动箱侧面主体,所述限位杆背离连杆的一端与限位齿轮相互啮合。
9.优选的,所述活动滑轮和导向滑轮外表面套设有牵引绳,所述安装件上表面对称连接有拉绳。
10.优选的,所述斗体背离安装横梁的一侧表面通过螺栓安装有对接板,所述斗体端部表面均匀设置有对接齿,所述斗体的端部表面均匀开设有对接槽,多个所述对接齿和多个所述对接槽交错分布,所述对接齿和对接槽内部尺寸相适配。
11.与现有技术相比,本实用新型的有益效果是:本实用新型提供一种环保高效的自动化混合堆场的抓斗,装置采用全程智能控制系统实现无人管理,可提高料区操作标准化、规范化,人员成本大幅下降的同时,工作效率最大化,优化物流流程,提升信息化程度,以达到智能、稳定、高效、安全运行的目的,装置内部还设置有自锁机构,以保证在牵引绳和滑轮发生打滑或者断列情况下,装置自锁,保持关闭状态,防止内部物料掉落,发生事故。
附图说明
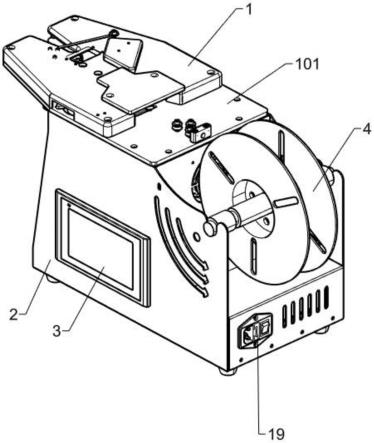
12.图1为本实用新型的整体纵向正剖视图;
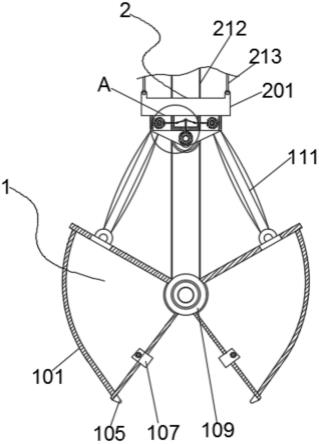
13.图2为本实用新型的抓斗机构俯视图;
14.图3为本实用新型的图1的a区放大图;
15.图4为本实用新型的对接齿槽的结构示意图。
16.图中:1、抓斗机构;101、斗体;102、延伸板;103、安装横梁;104、连接座;105、对接齿;106、对接槽;107、对接板;108、主轴;109、限位板;110、活动滑轮;111、连接杆;2、限位自锁机构;201、安装件;202、活动箱;203、限位轴;204、限位齿轮;205、转轴;206、导向滑轮;207、调整盘;208、调整弧板;209、调整杆;210、连杆;211、限位杆;212、牵引绳;213、拉绳;214、弧形推板。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
18.请参阅图1-图4,本实用新型提供如下技术方案:一种环保高效的自动化混合堆场的抓斗,包括抓斗机构1和限位自锁机构2,抓斗机构1包括斗体101和主轴108,斗体101内部中空,斗体101截面成扇形,斗体101一端对称设置有延伸板102,斗体101上侧设置有安装横梁103,斗体101对称设置有两个,延伸板102通过轴承对称安装在主轴108外圆弧面,主轴108表面通过轴承安装有活动滑轮110,活动滑轮110置于两个延伸板102内侧,主轴108两端对称设置有限位板109,限位板109置于斗体101外侧,安装横梁103上表面对称设置有连接座104,两个连接座104之间通过轴承安装有连接杆111,限位自锁机构2包括安装件201和调整杆209,安装件201置于主轴108正上方,安装件201内侧下方设置有活动箱202,活动箱202内部中空,安装件201两侧通过轴承对称安装有限位轴203,连接杆111背离连接座104的一端通过轴承安装在限位轴203表面,限位轴203表面安装有限位齿轮204,两个限位齿轮204对称设置在活动箱202的两侧,安装件201内部下方通过轴承安装有转轴205,转轴205表面设置有导向滑轮206,导向滑轮206置于活动滑轮110的正上方。
19.为了通过调整盘207的转动,利用自身的离心力,使其表面滑动安装的调整弧板208外移,以形成较大尺寸的离心源,并对弧形推板214施加向上的推力,本实施例中,优选的,转轴205表面安装有调整盘207,调整盘207表面均匀安装有调整弧板208,调整杆209滑动安装在活动箱202的下主体上,且调整杆209贯穿活动箱202下主体,多个调整弧板208均滑动安装在调整盘207的外表面,调整杆209底端设置有弧形推板214,弧形推板214与调整弧板208外表面相接触。
20.为了通过调整杆209的上移,带动两侧的限位杆211外移,对限位齿轮204进行限位,实现自锁,本实施例中,优选的,调整杆209顶部通过轴承对称安装有连杆210,连杆210背离调整杆209的一端通过销轴安装有限位杆211,限位杆211贯穿活动箱202侧面主体,限位杆211背离连杆210的一端与限位齿轮204相互啮合。
21.为了可分别控制抓斗的开关和升降,提高抓取效率,本实施例中,优选的,活动滑轮110和导向滑轮206外表面套设有牵引绳212,安装件201上表面对称连接有拉绳213。
22.为了保证两个斗体101在对接时可以对接的更加稳定,同时在抓取时通过对接齿105可以更好的抓取物料,本实施例中,优选的,斗体101背离安装横梁103的一侧表面通过螺栓安装有对接板107,斗体101端部表面均匀设置有对接齿105,斗体101的端部表面均匀开设有对接槽106,多个对接齿105和多个对接槽106交错分布,对接齿105和对接槽106内部尺寸相适配。
23.本实用新型的工作原理及使用流程:本实用新型安装好过后,首先检查本实用新型的安装固定以及安全防护,然后就可以使用了,通过激光扫描和plc对抓斗进行控制,以实现无人管理,使用时首先要保证两个拉绳213对称连接在安装件201的上表面,并保证牵引绳212可以同时贯穿活动滑轮110和导向滑轮206外表面,通过同时控制拉绳213可以使得装置整体发生上下的位移,通过控制牵引绳212,可以控制两个斗体101的状态,抓取时,可以保持拉绳213不变,就可以保证安装件201的位置不变,然后放低一端的牵引绳212,可以带动带动导向滑轮206和活动滑轮110发生转动,安装件201固定使得导向滑轮206的高度就不会发生变化,然后由于拉绳213的放松活动滑轮110在转动的过程中由于自身重量会下降,带动主轴108进行下降,斗体101是通过轴承安装的,连接杆111自身长度不变,因此主轴108下移,会使得斗体101发生转动,绕主轴108使得底部开口增大,同时由于转轴205与导向滑轮206之间是固定安装,因此在下降过程中,导向滑轮206的转动会带动转轴205发生转动,转轴205与调整盘207之间也是固定安装,同时可以带动调整盘207发生转动,由于调整盘207转动的离心力会使得调整弧板208向外移,多个调整弧板208同时外移的同时发生转动,会使得调整弧板208外边缘形成一个直径较大的离心圆,并带动弧形推板214上移,弧形推板214的上移,会带动调整杆209移动,调整杆209的上移,会通过连杆210将两侧的限位杆211向活动箱202的一侧移动,继而使得限位杆211的端部脱离与限位齿轮204的相互限位,也就是当导向滑轮206发生转动时限位齿轮204才能发生转动,斗体101之间的底部开口后,控制拉绳213使得装置下移,然后拉动牵引绳212就要可以将堆料抓取,调整弧板208的上移会带动斗体101进行反转,使得两组对接齿105和对接槽106之间相互配合,以增加底部的稳定性,同时在合口时通过两侧对接板107的配合可以保证斗体101对接的准确性,防止发生错位,在工作过程中无论导向滑轮206是发生正传还是反转,限位杆211都不会与限位齿轮204进行限位,但是当装置发生打滑,或牵引绳212发生断裂时主轴108不在受到牵引绳212
的支撑,但是由于转轴205不会转动,顶部的调整弧板208缩进调整盘207内部,以及调整杆209自身的重力,使得限位杆211与限位齿轮204进行限位,继而防止连接杆111发生角度上的转动,以保证斗体101不会发生变化,保证装置的稳定,提高装置的安全性,本装置通过plc控制抓斗,以实现智能装载,并借助扫描技术来测量物料的分布及形状等工作,激光扫描仪必须采用一个稳定度及精度良好的旋转马达,实现无人管理智能装车,料区内安装若干监控摄像头,以实时监控,保证生产安全。
24.尽管已经示和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。