1.本发明涉及毫米波雷达应用与人体行为感知技术领域,具体涉及一种基于状态量分析及生命体征探测的毫米波雷达跌倒检测算法。
背景技术:
2.随着我国老龄化程度的加剧,养老问题已成为重要社会问题。跌倒作为意外和非故意性伤害中致死率第二大因素,是养老面临的一大难题。由于跌倒后往往不能及时被发现,容易对老人的身体健康和精神状态造成一定影响。而卫生间作为易发生跌倒的地点,同时又具有较强隐私性,因此更容易产生不被察觉的跌倒。
3.现有检测跌倒的常见方法包括基于穿戴式装置、摄像头、wifi、毫米波雷达等。其中穿戴式装置成本较低,但需在人体关键部位佩戴传感器,使用不便且容易忘记佩戴;基于摄像头的检测精度高且为非接触式检测,但计算成本高且暴露隐私;基于wifi的方法成本低、易部署,但容易受到其他外来信号的干扰;基于毫米波雷达的方法属于非接触式检测,无隐私泄露,传输速率高,抗干扰性强,检测精度高且成本较低。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种基于状态量分析及生命体征探测的毫米波雷达跌倒检测算法,能够对检测区域内发生的跌倒行为和滞留行为进行检测,并在出现异常状态时报警。具体方法如下:根据毫米波雷达返回的点云,处理后得到当前目标个数、目标质心高度、速度、位移等状态量信息作为人员状态的判别条件。其中,跌倒状态的判别条件为人数等于1、质心高度小于0.5m、速度小于0.8m/s,滞留状态的判别条件为人数等于1、速度小于0.8m/s、与初始位置的位移小于1m。
5.跌倒检测的优先级高于滞留检测,在不满足跌倒判别的条件下再进入对滞留的判断;若滞留检测过程中满足跌倒判别条件,则解除滞留检测,开始跌倒检测。此外,结合雷达模块返回的呼吸心跳信息进行辅助判断,根据该生命体征区分人体目标与其他干扰目标。
6.跌倒行为检测流程如下:首先判断是否满足跌倒的判别条件,若满足,则判断是否为首次进入跌倒检测阶段。
7.若当前是进入跌倒检测的第一帧,则记录跌倒检测的开始时间,然后进入下一帧的判断;若前一帧已经进入跌倒检测,此时判断进入跌倒检测状态的时间是否超过20s。
8.若进入跌倒检测状态的时间不满20s,则直接返回进入对下一帧的判断;若当前进入跌倒检测的状态已经超过20s,则进入跌倒状态。由于跌倒检测的优先级高于滞留检测,确认进入跌倒状态则解除滞留检测。
9.判断当前进入跌倒检测的时间是否超过30s,若是则发送跌倒报警并进入对下一帧的判断,否则直接进入下一帧。
10.滞留行为检测流程如下:首先判断是否满足人数等于1、速度小于0.8m/s的条件,若不满足,则解除滞留检测;若满足条件,则判断是否为首次进入滞留检测阶段。
11.若当前是进入滞留检测的第一帧,记录滞留检测的开始时间和初始位置,然后进入下一帧;若前一帧已经进入滞留检测,此时判断当前位置与初始位置的位移是否大于1m。
12.若位移大于1m,则解除滞留检测并直接进入下一帧;若位移不大于1m,则判断当前进入滞留检测状态的时间是否超过30min。
13.若进入滞留检测状态已超过30min,则进入滞留状态并发送滞留报警,进入下一帧判断;否则直接进入下一帧。
14.本发明的有益效果为:1、本发明基于毫米波雷达进行对跌倒行为和滞留行为的检测,具有非接触式检测,无隐私泄露,传输速率高,抗干扰性强,检测精度高且成本较低的优点。
[0015] 2、基于状态量分析,判断目标当前状态,是一种基于结果的检测方式。由于本发明主要检测人倒地后,在一段时间内无法重新爬起的行为,因此无需关心跌倒的过程,而是提取跌倒后人体的状态量进行判断,避免检测跌倒过程时特征设置难以覆盖不同跌倒动作的问题,且计算量更小。
[0016]
3、滞留检测时除速度外,引入与初始位置的位移协同判断,能够有效筛除慢速移动的情况,避免误报。
[0017]
4、设置跌倒检测的优先级高于滞留检测,在不满足跌倒判别的条件下再进入对滞留的判断,若滞留检测过程中满足跌倒判别条件,则解除滞留检测,开始跌倒检测。考虑了跌倒行为造成的后果一般远大于滞留行为,能够有效规避滞留时间阈值过长导致跌倒漏报的情况。
[0018]
5、结合雷达模块返回的呼吸心跳信息进行辅助判断,根据该生命体征区分人体目标与其他干扰目标,减少误报。
附图说明
[0019]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0020]
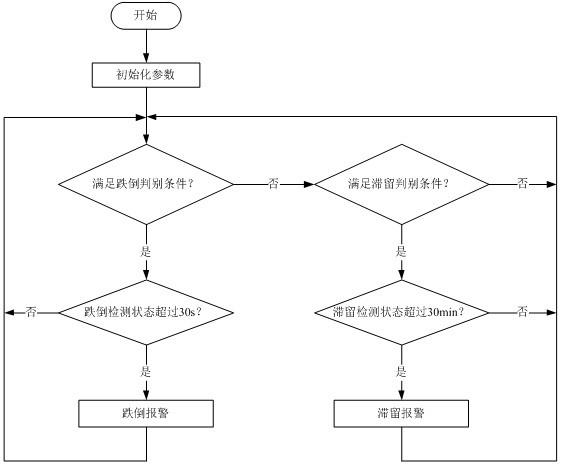
图1为本发明的检测算法整体流程图。
[0021]
图2为本发明的跌倒行为检测流程图。
[0022]
图3为本发明的滞留行为检测流程图。
具体实施方式
[0023]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0024]
实施例1:本发明提供一种基于状态量分析及生命体征探测的毫米波雷达跌倒检测算法,算法整体流程图如图1所示。
[0025]
首先初始化参数,然后根据毫米波雷达返回的点云数据处理得到当前目标个数、目标质心高度、速度、位移等状态量信息作为人员状态判别条件。跌倒状态的判别条件为人数等于1、质心高度小于0.5m、速度小于0.8m/s,滞留状态的判别条件为人数等于1、速度小于0.8m/s、与初始位置的位移小于1m。其中,跌倒检测的优先级高于滞留检测,在不满足跌倒判别的条件下再进入对滞留的判断;若滞留检测过程中满足跌倒判别条件,则解除滞留检测,开始跌倒检测。若满足跌倒或滞留判别条件的维持时间超过设置的时间阈值,则进行报警。
[0026]
在本发明的实施例中,针对跌倒检测和滞留检测分别设置标志,其中falldetsign表示跌倒检测状态,falldetsign = 0时表示当前为追踪状态,falldetsign = 1时表示当前已进入跌倒检测状态,falldetsign = 2表示当前进入跌倒检测的时间超过预先设置的阈值,判断为跌倒状态;同理,staydetsign表示滞留检测状态,staydetsign = 0时表示当前为追踪状态,staydetsign = 1时表示当前已进入滞留检测状态,staydetsign = 2时表示当前进入滞留检测的时间超过预先设置的阈值,判断为滞留状态。
[0027]
跌倒行为检测流程如图2所示,具体步骤如下:步骤s1,初始化阶段,falldetsign和staydetsign均设为0;步骤s2,判断是否满足跌倒的判别条件,若满足,则根据falldetsign的值判断是否为首次进入跌倒检测阶段;步骤s301,若falldetsign = 0,说明当前是进入跌倒检测的第一帧,此时将falldetsign的值置为1,记录跌倒检测的开始时间,然后进入下一帧的判断;步骤s302,若falldetsign≠0,则说明前一帧已经进入跌倒检测,此时判断进入跌倒检测状态的时间是否超过20s;步骤s401,若进入跌倒检测状态的时间不满20s,则直接返回进入对下一帧的判断;步骤s402,若当前进入跌倒检测状态的时间已经超过20s,则进入跌倒状态,将falldetsign置为2。由于跌倒检测的优先级高于滞留检测,若确认进入跌倒状态则解除滞留检测,staydetsign置为0;步骤s5,判断当前进入跌倒检测的时间是否超过30s,若是则发送跌倒报警并进入对下一帧的判断,否则直接进入下一帧。
[0028]
滞留行为检测流程图如图3所示,具体步骤如下:步骤s1,判断是否满足人数等于1、速度小于0.8m/s的条件;步骤s201,若不满足步骤s1的条件,则令staydetsign = 0,解除滞留检测;步骤s202,若满足条件,则根据staydetsign的值判断是否为首次进入滞留检测阶段;步骤s301,若staydetsign = 0,说明当前是进入滞留检测的第一帧,此时将staydetsign置为1,记录滞留检测的开始时间和初始位置,然后进入下一帧;步骤s302,若staydetsign≠0,则说明前一帧已经进入滞留检测,此时判断当前位
置与初始位置的位移是否大于1m;步骤s401,若位移大于1m,则令staydetsign = 0,解除滞留检测并直接进入下一帧;步骤s402,若位移不大于1m,则判断当前进入滞留检测状态的时间是否超过30min;步骤s5,若进入滞留检测状态已超过30min,则进入滞留状态,将staydetsign置为2并发送滞留报警,进入下一帧判断;否则直接进入下一帧。
[0029]
在本发明的实施例中,上述位移的计算方式如下:设初始位置position0(x0, y0, z0),当前位置position(x, y, z),按欧式距离的方法计算,位移=。
[0030]
本发明利用毫米波雷达进行跌倒和滞留行为检测,具有非接触、无隐私泄露、传输速率高、抗干扰性强、检测精度高且成本较低的优点。采用基于结果的检测方式,无需关心跌倒的过程,而是提取跌倒后人体的状态量进行判断,既避免了检测跌倒过程时特征设置难以覆盖不同跌倒动作的问题,同时减少计算量。进行滞留检测时引入了与初始位置的位移信息协同判断,能够有效筛除慢速移动的情况,避免误报。在检测优先级上设置跌倒检测的优先级高于滞留检测,考虑了跌倒行为造成的后果一般远大于滞留行为,能够有效规避滞留时间阈值过长导致跌倒漏报的情况。此外,结合毫米波雷达返回的呼吸心跳信息进行辅助判断,根据该生命体征区分人体目标与其他干扰目标,减少误报。
[0031]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。