技术特征:
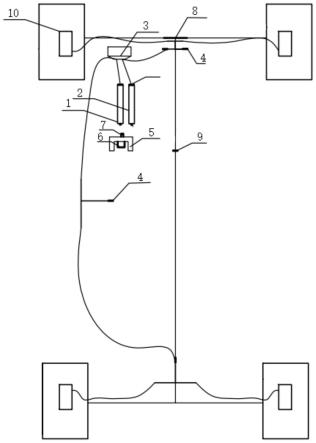
1.一种无人驾驶方程式赛车的制动系统,其特征在于,包括踏板(5)、电控液压泵(3)、第一制动主缸(1)、第二制动主缸(2)、每个轮胎上的制动卡钳(10)和设置在赛车前端的激光雷达(8);电控液压泵(3)包括两条回路,两条回路出口分别连接有两条液压管路,第一液压管路与前轮两个轮胎上的制动卡钳(10)均连接,第二液压管路与后轮两个轮胎上的制动卡钳(10)均连接,第一制动主缸(1)和第二制动主缸(2)的输出端分别连接电控液压泵(3)的两条回路入口,第一制动主缸(1)和第二制动主缸(2)的输入端均设置有电机,踏板(5)上设置有踏板力传感器(7);激光雷达(8)和踏板力传感器(7)输出端连接有控制模块(9)输入端,控制模块(9)输出端与电控液压泵(3)和电机输入端连接。2.根据权利要求1所述的无人驾驶方程式赛车的制动系统,其特征在于,踏板(5)连接有踏板臂(6),踏板臂(6)连接有平衡杆的中间部位,控制模块(9)中存储有平衡杆的杠杆比。3.根据权利要求1所述的无人驾驶方程式赛车的制动系统,其特征在于,踏板(5)连接有踏板臂(6),踏板臂(6)连接有踏板行程模拟器。4.根据权利要求1所述的无人驾驶方程式赛车的制动系统,其特征在于,前轮的其中一个轮胎和后轮的其中一个轮胎均设置有一个轮速传感器,两条液压管路上均设置有一个压力传感器(4),压力传感器(4)和轮速传感器的输出端均连接控制模块(9)输入端。5.根据权利要求1所述的无人驾驶方程式赛车的制动系统,其特征在于,电控液压泵(3)的第一条回路包括第一脉动阻尼器(30),第一脉动阻尼器(30)分别连接第二常开电磁阀(12)、第一吸入电磁阀(21)和第一限压电磁阀(19)的入口;第二常开电磁阀(12)出口连接有第二常闭电磁阀(16)入口与左前轮的制动卡钳(10);第一吸入电磁阀(21)出口连接有第一双联液压泵(23)的一端,第一双联液压泵(23)另一端连接有第一缓冲腔(26),第一双联液压泵(23)连接有直流电机(25),第一缓冲腔(26)和第一限压电磁阀(19)出口共同连接第一常开电磁阀(11)入口,第一常开电磁阀(11)出口连接有第一常闭电磁阀(15)入口与右前轮的制动卡钳(10),第一常闭电磁阀(15)和第二常闭电磁阀(16)出口均连接有第一蓄能器(28),第一蓄能器(28)与第一双联液压泵(23)的一端连接;电控液压泵(3)的第二条回路与第一条回路相同,连接左后轮和右后轮的制动卡钳(10)。6.根据权利要求1所述的无人驾驶方程式赛车的制动系统,其特征在于,第一制动主缸(1)和第二制动主缸(2)分别连接有一个制动液储液壶。7.根据权利要求1所述的无人驾驶方程式赛车的制动系统,其特征在于,控制模块(9)采用51单片机、k60单片机、stm32芯片或树莓派。8.一种基于权利要求1-7任意一项所述无人驾驶方程式赛车的制动系统的制动方法,其特征在于,包括以下过程:激光雷达(8)感知到前方存在障碍物后,传递信号给控制模块(9),控制模块(9)控制电控液压泵(3)进行增压,通过制动卡钳(10)使得车辆制动停车;激光雷达(8)识别障碍物仍存在后,传递信号给控制模块(9),控制模块(9)控制电控液压泵(3)进行保压,使得车辆保持制动停车状态;激光雷达(8)未识别障碍物后,传递信号给控制模块(9),控制模块(9)控制电控液压泵
(3)进行减压,制动卡钳(10)的制动力减小至零;需要人工进行制动时,踩下踏板(5),踏板力传感器(7)传递信号给控制模块(9),控制模块(9)控制与第一制动主缸(1)和第二制动主缸(2)连接的电机,电机输出传递至第一制动主缸(1)和第二制动主缸(2)输入端,第一制动主缸(1)和第二制动主缸(2)进行增压,通过制动卡钳(10)使得车辆制动停车。9.根据权利要求8所述的无人驾驶方程式赛车的制动方法,其特征在于,电控液压泵(3)进行增压时,第一回路中的第一吸入电磁阀(21)、第一限压电磁阀(19)和直流电机(25)均通电,第一常开电磁阀(11)、第二常开电磁阀(12)、第一常闭电磁阀(15)和第二常闭电磁阀(16)均断电;电控液压泵(3)进行保压时,直流电机(25)、第一常开电磁阀(11)、第二常开电磁阀(12)、第一吸入电磁阀(21)均通电,第一限压电磁阀(19)、第二常闭电磁阀(16)和第二常闭电磁阀(16)均断电;电控液压泵(3)进行减压时,直流电机(25)、第一常开电磁阀(11)、第二常开电磁阀(12)、第二常闭电磁阀(16)和第二常闭电磁阀(16)均通电,第一吸入电磁阀(21)和第一限压电磁阀(19)均断电;第二回路与第一回路的控制过程相同。
技术总结
本发明公开了一种无人驾驶方程式赛车的制动系统及方法,包括踏板、电控液压泵、第一制动主缸、第二制动主缸、每个轮胎上的制动卡钳和设置在赛车前端的激光雷达;电控液压泵包括两条回路,两条回路出口分别连接有两条液压管路,第一液压管路与前轮两个轮胎上的制动卡钳均连接,第二液压管路与后轮两个轮胎上的制动卡钳均连接,第一制动主缸和第二制动主缸的输出端分别连接电控液压泵的两条回路入口,第一制动主缸和第二制动主缸的输入端均设置有电机,踏板上设置有踏板力传感器;激光雷达和踏板力传感器连接有控制模块,控制模块与电控液压泵和电机连接。可靠性好,中间环节少、系统响应快,并且同时实现人工和自动制动的方式。并且同时实现人工和自动制动的方式。并且同时实现人工和自动制动的方式。
技术研发人员:韩毅 伍晨曦 田迪 许琳 岳佳豪 胡卉
受保护的技术使用者:陕西弘毅正清智能科技有限公司
技术研发日:2022.09.30
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。