1.本发明涉及卸粮筒一键回位技术领域,特别涉及收割机卸粮筒零位自动标定装置及标定方法。
背景技术:
2.随着我国农业技术不断的发展,收割机在田收割满仓后去接驳点卸粮时已经实现了卸粮筒的自动转出,即卸粮筒在自动控制装置、油缸及电机作用下上升至一定高度并在水平方向旋转至定点位置卸粮;卸粮完成后,卸粮筒在自动控制装置、电机作用下回收至支架上,卸粮筒的一键转出及一键回位都需要初始标定的零位来作为参照点,即卸粮筒回落至支架上时的初始位置作为控制系统标定的零位。目前,卸粮筒零位的标定通常是手动实现,通过手动长按控制器上的复位按键,标定并存储卸粮筒的初始位置即零位,包括水平方向的零位和竖直方向的零位。
3.手动标定零位的方法效率低,在农忙季节,驾驶员基本上都是在争分夺秒的进行收割、卸粮,长时间的疲劳作业驾驶员可能会忘记标定零位或者不知道什么时候需要去标定零位,当长时间不进行零位标定时,由于液压油有杂质或者电机旋转的角度误差造成卸粮筒无法回位落至支架上影响收割机作业效率。
4.现有技术中,专利号:2015103945341,公开了一种联合收割机高位卸粮一键回收自动控制装置,通过自动控制装置解决了手动发出和回收卸粮筒的问题,并且还具有一键发出、一键回收功能,从而大大提高了联合收割机的工作效率,但该装置一键发出、一键回收功能的基础还是需要手动进行零位的标定,否则有可能卸粮筒回不到支架上。
技术实现要素:
5.本发明的目的在于针对现有的卸粮筒零位无法自动标定,必须手动操作的缺点,提出的一种自动标定零位装置和方法,当卸粮筒结构的末端回位到支架上时对当前位置进行零位标定一次,无需作业员每隔一段时间对卸粮筒的零位进行手动标定,提高工作效率,提升用户体验。
6.具体的,收割机卸粮筒零位自动标定装置包括:控制器、三通接头、压力传感器、位置检测装置,其特征在于:所述控制器与油缸通过电磁阀相连,所述三通接头的a端连接油缸的油路口,b端通过油管与电磁阀相连,c端与压力传感器相连,所述三通接头各接口处油液的压力相同;所述压力传感器与控制器电相连并将压力信息实时传递至控制器;所述位置检测装置内置于油缸并与控制器电相连,所述位置检测装置实时传递活塞杆位置信息至控制器;所述控制器实时接收压力传感器及位置检测装置的信息并对信息进行判断及对卸粮筒初始位进行标定并存储初始位置信息;所述油缸包括底座、缸体、活塞杆,所述底座固定于收割机卸粮筒结构上,所述活塞杆的末端与卸粮筒相连,并可推动卸粮筒在竖直方向上转动,所述油缸的油路口位于缸体上靠近底座的位置用于油缸的进油和回油;所述位置检测装置包括安装在油缸活塞杆起始端的位置感应磁环,以及一端连接有固定座并固定于
油缸底座内部另一端设置在活塞杆内部的pcb板,所述pcb板外套钢管并连接于固定座,所述pcb板上设有若干个用以感应磁环位置变化从而获得不同的电压信号的霍尔芯片。
7.收割机卸粮筒零位自动标定方法:包括so1:接收油缸内位置检测装置的位置信息,并判定位置信息是否在范围内;若在范围内则执行so2;so2:接收压力传感器的压力信息,并判断压力信息是否为零;若为零,则执行so3;so3:控制器自动标定当前卸粮筒的位置为零位,并存储零位信息。
8.所述位置信息是电压信号,所述零位信息包括:包括水平方向的零位和竖直方向的零位,即卸粮筒置于支架上时的初始位置信息,用于卸粮筒一键转出和一键回位的参照位。
附图说明
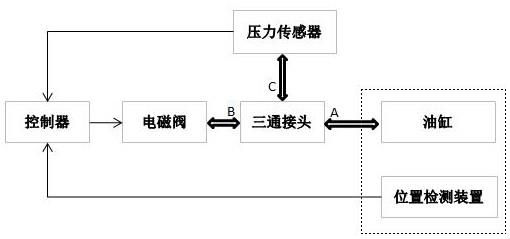
9.图1为,卸粮筒零位自动标定装置原理图。
具体实施方式
10.为使本发明技术方案和优点更加清楚,下面结合附图对本发明实施方式进一步描述。本发明能够以多种不同于此描述的其它方式来实施,这些实施例不构成对本发明的限定,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的其它实施例,皆属于本发明保护的范围。
11.在本发明中,术语
ꢀ“
安装”、“固定”、“连接”、等应做广义理解。
12.结合图1,收割机卸粮筒零位自动标定装置包括:控制器、三通接头、压力传感器、位置检测装置,所述控制器与油缸通过电磁阀相连,在电磁阀与油缸之间接有三通接头,所述三通接头的a端连接油缸的油路口,b端通过油管与电磁阀相连,c端与压力传感器相连,根据液压原理可知三通接头各接口处液压相同,即通过压力传感器可知油缸油路口的压力值;所述压力传感器与控制器电相连并将压力信息实时传递至控制器;所述位置检测装置内置于油缸并与控制器电相连,所述位置检测装置外接电源并实时传递活塞杆位置信息至控制器;所述控制器实时接收压力传感器及位置检测装置的信息并对信息进行判断,当位置检测装置和压力传感器的数值同时满足条件时对卸粮筒当前位置进行零位标定并存储位置信息;所述油缸包括底座、缸体、活塞杆,所述底座固定于收割机卸粮筒结构上,所述活塞杆的末端与卸粮筒相连,并可推动卸粮筒在竖直方向上转动,所述油缸的油路口位于缸体上靠近底座的位置用于油缸的进油和回油;所述位置检测装置包括安装在油缸活塞杆起始端的位置感应磁环,以及一端连接有固定座并固定于油缸底座内部另一端设置在活塞杆内部的pcb板,所述pcb板外套钢管并连接于固定座,所述pcb板上设有若干个用以感应磁环位置变化从而获得不同的电压信号的霍尔芯片,所述pcb板固定于油缸底座内部的一端接有电源线、地线、信号线,用以外部供电及电压信号的输出;所述电压信号与活塞杆绝对位移线性相关,根据所述电压信号来判断油缸伸缩的不同位置。
13.卸粮筒标定的初始位置即零位,决定了卸粮筒回收停放的位置,所以必须在卸粮筒位于卸粮筒支架上时进行初始位置标定,当卸粮筒搁置于支架上时,当前的位置为零位,即水平方向的零位和竖直方向的零位,此时三通接头各接口处的液压为零,但油缸活塞杆
在竖直方向上有高度,即油缸内位置检测装置的磁环会与pcb板上的霍尔芯片感应从而获得电压信号,所述电压信号为大于零的定值,并有一个微小的误差范围;即卸粮筒位于支架上的初始位置时,控制器会同时检测到位置检测装置的值大于零,压力传感器的液压值为零,此时控制器对卸粮筒当前位置进行零位自动标定、存储,所述零位包括水平方向和竖直方向的零位。
14.收割机卸粮筒零位自动标定方法:包括so1:接收油缸内位置检测装置的位置信息,并判定位置信息是否在范围内;若在范围内则执行so2;so2:接收压力检测信息,并判断压力信息是否为零;若为零,则执行so3;so3:控制器自动标定当前卸粮筒的位置为零位。
15.所述位置信息是电压信号,所述零位信息即卸粮筒初始位置信息,包括:包括水平方向的零位和竖直方向的零位,即卸粮筒置于支架上时的初始位置信息,用于卸粮筒一键转出和一键回位的参照位。
16.通过以上零位自动标定装置及标定方法,当卸粮筒位于卸粮筒支架上时进行零位标定一次,无需手动复位按键标定,避免了未进行零位标定导致卸粮筒无法回到支架上的情况发生,提高了作业效率,提升了用户体验。
技术特征:
1.收割机卸粮筒零位自动标定装置包括:控制器、三通接头、压力传感器、位置检测装置,其特征在于:所述控制器与油缸通过电磁阀相连,在电磁阀与油缸之间接有三通接头,所述三通接头的a端连接油缸的油路口,b端与油管连通,c端与压力传感器相连,所述三通接头各端油液的压力相同;所述压力传感器与控制器电相连并将油缸油路口的压力信息实时传递至控制器,所述位置检测装置内置于油缸并与控制器电相连,所述位置检测装置实时传递活塞杆位置信息至控制器,所述控制器实时接收位置检测装置和压力传感器的信息并对信息进行判断,当位置检测装置的位置信息在一定范围内且不为零同时压力传感器的压值为零,控制器对卸粮筒当前位置进行零位标定和存储。2.根据权利要求1所述的收割机卸粮筒零位自动标定装置,其特征在于:所述油缸包括底座、缸体、活塞杆,所述底座固定于收割机卸粮筒结构上,所述活塞杆的末端与卸粮筒相连,并可推动卸粮筒在竖直方向上转动,所述油缸的油路口位于缸体上靠近底座用于油缸的进油和回油。3.根据权利要求1所述的收割机卸粮筒零位自动标定装置,其特征在于:所述位置检测装置包括安装在油缸活塞杆起始端的位置感应磁环,以及一端固定在油缸底座内部另一端设置在活塞杆内部的pcb板,所述pcb板外套钢管并固定于油缸底座内,所述pcb板上设有若干个用以感应磁环位置变化从而获得不同的电压信号的霍尔芯片。4.收割机卸粮筒零位自动标定方法:包括so1:接收油缸内位置检测装置的位置信息,并判定位置信息是否在范围内;若在范围内则执行so2;so2:接收压力检测信息,并判断压力信息是否为零;若为零,则执行so3;so3:控制器自动标定当前卸粮筒的位置为零位,并存储零位信息。5.根据权利要求4所述的收割机卸粮筒零位自动标定方法:所述位置信息是电压信号,且大于零。6.根据权利要求4所述的收割机卸粮筒零位自动标定方法:所述零位信息包括水平方向的零位和竖直方向的零位,即卸粮筒置于支架上时的初始位置信息,用于卸粮筒一键转出和一键回位的参照位。
技术总结
收割机卸粮筒零位自动标定装置包括:控制器、三通接头、压力传感器、位置检测装置,其特征在于:所述控制器与油缸通过电磁阀相连,在电磁阀与油缸之间接有三通接头,所述三通接头的A端连接油缸的油路口,B端与油管连通,C端与压力传感器相连,所述三通接头各端油液的压力相同;所述压力传感器与控制器电相连并将油路口的压力信息实时传递至控制器,所述位置检测装置内置于油缸并与控制器电相连,所述控制器实时接收位置检测装置和压力传感器的信息并对信息进行判断,当位置检测装置的位置信息在一定范围内且不为零同时压力传感器的压值为零,控制器对卸粮筒当前位置进行零位标定和存储。储。储。
技术研发人员:万信超 李畅
受保护的技术使用者:武汉盛硕电子有限公司
技术研发日:2022.09.22
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。