1.本发明涉及一种具有吸附结构的幕墙安全检测机器人,属于幕墙检测技术领域。
背景技术:
2.幕墙是一种美观新颖的建筑墙体装饰方法,是现代主义高层建筑时代的显著特征。随着经济的发展,越来越多的高层建筑采用幕墙。幕墙能将建筑美学、建筑功能、建筑节能和建筑结构等因素有机地统一起来,建筑物从不同角度呈现出不同的色调,随阳光、月色、灯光的变化给人以动态的美。但是玻璃幕墙也存在坠落等风险,需要对玻璃幕墙进行坠落风险检测。
3.目前,现有的幕墙检测装置大都为激励器和传感器配合,但待检测的幕墙由于时间长或安装不规范的影响,可能会产生凹进和凸出的情况,而大多数的激励器和传感器的移动距离为固定的,可能造成幕墙损坏或检测结果不准确。
技术实现要素:
4.本发明的目的在于提供一种具有吸附结构的幕墙安全检测机器人,可以解决传统的幕墙检测装置造成的幕墙损坏或检测结果不准确的问题。
5.为达到上述目的,本发明提供如下技术方案:
6.一种具有吸附结构的幕墙安全检测机器人,包括:
7.机器人主体,包括承重板,所述承重板上设有滑槽;
8.驱动机构,设置于所述承重板上,所述驱动机构包括驱动电机、与所述驱动电机的输出轴相连的第一旋转轴以及设置于所述第一旋转轴上的第一非完全齿轮,所述驱动电机带动所述第一旋转轴、所述第一非完全齿轮同步转动;
9.距离确定机构,包括齿轮组件和与所述齿轮组件啮合的齿条,所述齿条垂直安装于所述滑槽内;所述齿轮组件还与所述第一非完全齿轮间歇啮合,所述齿轮组件在所述第一非完全齿轮的带动下旋转,并带动所述齿条于所述滑槽内上下滑动;所述距离确定机构还包括活塞组件,所述活塞组件包括活塞筒、至少部分位于所述活塞筒内的活塞杆以及分别连接所述活塞筒和所述活塞杆的弹性件,所述活塞筒与所述齿条底端固定,所述活塞杆具有第一端和与所述第一端相对的第二端,所述第一端位于所述活塞筒内,所述第二端位于所述活塞筒外,所述第一端上安装有距离传感器,所述距离传感器测量所述活塞杆在所述活塞筒内的移动距离,以确定所述幕墙的凹凸程度;所述第二端上安装有检测件,所述检测件检测作用到幕墙上的振动信号;
10.敲击机构,与所述距离确定机构信号连接,所述敲击机构包括安装于所述齿条上的感应件和与所述感应件信号连接的敲击组件,所述敲击组件在接收到所述感应件发送的感应信号后开始对所述幕墙进行敲击;所述敲击组件还与所述距离传感器信号连接,所述敲击组件在接收到所述距离传感器发送的凹凸程度信号后控制所述敲击组件对所述幕墙的敲击力度;
11.吸附机构,与所述驱动机构相连,以使所述幕墙安全检测机器人吸附在所述幕墙上。
12.进一步地,所述齿轮组件包括支撑板以及与所述支撑板转动连接的第二旋转轴、第三旋转轴,所述支撑板位于所述承重板上,所述第二旋转轴上固定有第二非完全齿轮,所述第三旋转轴上固定有第三非完全齿轮和第一齿轮,所述第一齿轮与所述第一非完全齿轮间歇啮合,所述第二非完全齿轮、所述第三非完全齿轮、所述齿条间歇啮合。
13.进一步地,当所述第三非完全齿轮与所述第二非完全齿轮啮合时,所述第三非完全齿轮与所述齿条不啮合,所述第三非完全齿轮带动所述第二非完全齿轮旋转,所述第二非完全齿轮带动所述齿条向上/下滑动。
14.进一步地,当所述第三非完全齿轮与所述第二非完全齿轮不啮合时,所述第三非完全齿轮与所述齿条啮合,所述第三非完全齿轮带动所述齿条向上/下滑动。
15.进一步地,所述敲击组件包括电动推杆和位于所述电动推杆末端的敲击块,所述电动推杆在接收到所述感应信号后对所述幕墙进行敲击,并根据接收到的凹凸程度信号控制所述敲击组件对所述幕墙的敲击力度。
16.进一步地,所述感应件为压敏开关。
17.进一步地,所述吸附机构包括空心盘和位于所述空心盘内的第二齿轮,所述第一旋转轴穿设在所述空心盘内,所述第二齿轮位于所述第一旋转轴上,所述空心盘内设有与所述第二齿轮啮合的内齿圈,所述第一旋转轴带动所述第二齿轮、所述内齿圈旋转。
18.进一步地,所述吸附机构还包括管道组件和与所述管道组件连通的吸附组件,所述管道组件还与所述空心盘连通,通过所述空心盘内的所述第二齿轮和所述内齿圈旋转,使得所述管道组件内产生负压,所述吸附组件因所述负压吸附在所述幕墙上。
19.进一步地,所述幕墙安全检测机器人还包括行走机构,所述行走机构包括两组行走组件,任一组所述行走组件包括相对设置的两个行走轮以及分别连接两个所述行走轮的转动杆,所述转动杆上还设有连接板,所述连接板与所述承重板相连,其中一个所述转动杆上还设有第三齿轮,所述第三齿轮与所述第一非完全齿轮间隙啮合,所述第一非完全齿轮带动所述第三齿轮、所述转动杆、所述行走轮转动。
20.一种具有吸附结构的幕墙安全检测机器人的工作方法,所述方法应用于如上述中任一项所述的幕墙安全检测机器人中;所述方法包括:
21.s1:将所述幕墙安全检测机器人放置到幕墙上,所述吸附机构工作以使所述幕墙安全检测机器人吸附在所述幕墙上;
22.s2:驱动机构驱动距离确定机构工作,通过距离传感器测量活塞杆在活塞筒内的移动距离,以确定所述幕墙的凹凸程度,并将凹凸程度信号发送给敲击机构;
23.s3:在敲击组件接收到感应件发送的感应信号后对所述幕墙进行敲击,并根据接收到的凹凸程度信号控制所述敲击组件对所述幕墙的敲击力度;
24.s4:通过检测件来检测作用到所述幕墙上的振动信号。
25.本发明的有益效果在于:提供了一种具有吸附结构的幕墙安全检测机器人,通过距离传感器来测量活塞杆在活塞筒内的移动距离,以确定幕墙的凹凸程度,并将凹凸程度信号发送给敲击机构,随后在敲击组件在接收到感应件发送的感应信号后开始对幕墙进行敲击,并根据接收到的凹凸程度信号控制敲击组件对幕墙的敲击力度,最后通过检测件来
检测作用到幕墙上的振动信号,可以解决传统的幕墙检测装置造成的幕墙损坏或检测结果不准确的问题。
26.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
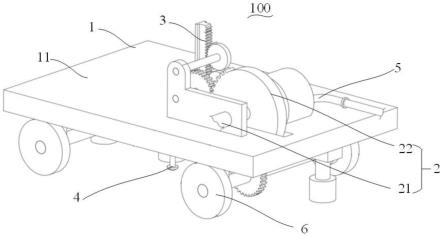
27.图1为本技术一种幕墙安全检测机器人的结构示意图;
28.图2为幕墙安全检测机器人的部分结构示意图;
29.图3为图1中距离确定机构的结构示意图;
30.图4为图1中活塞组件的剖视图;
31.图5为图1中吸附机构的结构示意图;
32.图6为吸附机构的部分结构示意图;
33.图7为一种幕墙安全检测机器人的工作方法的流程图。
34.100-幕墙安全检测机器人,1-机器人主体,11-承重板,2-驱动机构,21-第一旋转轴,22-第一非完全齿轮,3-距离确定机构,31-齿轮组件,311-支撑板,312-第二旋转轴,313-第三旋转轴,314-第二非完全齿轮,315-第三非完全齿轮,316-第一齿轮,32-齿条,33-活塞组件,331-活塞筒,332-活塞杆,333-弹性件,34-检测件,4-敲击机构,41-感应件,42-敲击组件,421-电动推杆,422-敲击块,5-吸附机构,51-第二齿轮,52-空心盘,53-内齿圈,54-管道组件,541-吸气管,542-排气管,543-单向阀,5431-左单向阀,5432-右单向阀,55-吸附组件,551-吸附箱,552-吸附柱,6-行走机构,61-行走组件,611-行走轮,612-转动杆,613-连接板,614-第三齿轮。
具体实施方式
35.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
36.下面结合附图和实施例,对本技术的具体实施方式作进一步详细描述。以下实施例用于说明本技术,但不用来限制本技术的范围。
37.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
38.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语
在本技术中的具体含义。
39.请参考图1至图4,本技术一较佳实施例提供了一种具有吸附结构的幕墙安全检测机器人100,包括:机器人主体1、驱动机构2、距离确定机构3、敲击机构4和吸附机构5。机器人主体1包括承重板11,承重板11作为主要的承载结构,其上设有滑槽(未图示),该滑槽适于安装距离确定机构3。驱动机构2用于驱动距离确定机构3、敲击机构4和吸附机构5工作。距离确定机构3用于确定幕墙的凹凸程度。敲击机构4与距离确定机构3信号连接,敲击机构4可根据幕墙的凹凸程度以调节其对幕墙的敲击力度,进而避免因敲击机构4的敲击力度过大或者过小,对幕墙造成损坏或影响检测结果。
40.具体的,驱动机构2设置于承重板11上。驱动机构2包括驱动电机(未图示)、与驱动电机的输出轴相连的第一旋转轴21以及设置于第一旋转轴21上的第一非完全齿轮22,在实际工作时,驱动电机带动第一旋转轴21、第一非完全齿轮22同步转动。
41.距离确定机构3包括齿轮组件31和与齿轮组件31啮合的齿条32,齿条32垂直安装于承重板11的滑槽内。进一步地,齿轮组件31还与第一非完全齿轮22间歇啮合,以使齿轮组件31可在第一非完全齿轮22的带动下旋转,并带动齿条32于滑槽内沿其齿条32的轴线方向上下滑动。在使用时,当第一非完全齿轮22与齿轮组件31啮合时,齿轮组件31在第一非完全齿轮22的带动下旋转,并带动齿条32于滑槽内上下滑动;当第一非完全齿轮22与齿轮组件31不啮合时,齿轮组件31不带动齿条32工作。
42.呈上述,齿轮组件31包括支撑板311以及与支撑板311转动连接的第二旋转轴312、第三旋转轴313,支撑板311位于承重板11上,第二旋转轴312上固定有第二非完全齿轮314,第三旋转轴313上固定有第三非完全齿轮315和第一齿轮316,第一齿轮316与第一非完全齿轮22间歇啮合,第二非完全齿轮314位于第三非完全齿轮315正上方,第二非完全齿轮314、第三非完全齿轮315与齿条32间歇啮合。
43.在一个示例中,当第三非完全齿轮315与第二非完全齿轮314啮合时,第三非完全齿轮315与齿条32不啮合,第二非完全齿轮314与齿条32啮合,此时,第三非完全齿轮315带动第二非完全齿轮314旋转,第二非完全齿轮314带动齿条32向上/下滑动。例如,当第三非完全齿轮315顺时针旋转时,第二非完全齿轮314逆时针旋转,齿条32在第二非完全齿轮314的带动下向上滑动。当第三非完全齿轮315逆时针旋转时,第二非完全齿轮314顺时针旋转,齿条32在第二非完全齿轮314的带动下向下滑动。
44.在另一示例中,当第三非完全齿轮315与第二非完全齿轮314不啮合时,第三非完全齿轮315与齿条32啮合,第二非完全齿轮314与齿条32不啮合,此时,第三非完全齿轮315带动齿条32向上/下滑动。比如,当第三非完全齿轮315顺时针旋转时,齿条32在三非完全齿轮315的带动下向下滑动。当第三非完全齿轮315逆时针旋转时,齿条32在三非完全齿轮315的带动下向上滑动。
45.需要说明的是,第二非完全齿轮314和第三非完全齿轮315上的齿的数量不唯一,只要具有上述功能即可,本技术不对第二非完全齿轮314和第三非完全齿轮315上的齿的数量作限定。
46.呈上述,距离确定机构3还包括活塞组件33,活塞组件33包括活塞筒331、至少部分位于活塞筒331内的活塞杆332以及分别连接活塞筒331和活塞杆332的弹性件333,活塞筒331与齿条32底端固定。当齿条32带动活塞组件33向下移动至与幕墙接触时,活塞筒331内
的活塞杆332会克服弹性件333的弹力向靠近齿条32的方向移动。在本实施例中,弹性件333为弹簧。
47.活塞杆332具有第一端(未标号)和与第一端相对的第二端(未标号),第一端位于活塞筒331内,即位于靠近齿条32的的一端,第二端位于活塞筒331外,即位于远离齿条32的的一端。第一端上安装有距离传感器(未图示),距离传感器用于测量活塞杆332在活塞筒331内的移动距离,以确定幕墙的凹凸程度。
48.具体的,幕墙安全检测机器人100具有初始状态和最终状态,初始状态为幕墙安全检测机器人100处于非工作状态,最终状态为幕墙安全检测机器人100处于工作状态。为了方便说明,将距离传感器测量到的活塞杆332在活塞筒331内的移动距离命名为第一距离,将初始状态时活塞杆332的第二端与幕墙之间的距离命名为第二距离,将齿条32的移动距离命名为总距离,在本实施例中,总距离不变,若幕墙向外凸出,则第二距离变小,对应的,第一距离变大,即活塞杆332在活塞筒331内的移动距离变大,距离传感器测量到的值变大;若幕墙向内凹陷,则第二距离变大,对应的,第一距离变小,即活塞杆332在活塞筒331内的移动距离变小,距离传感器测量到的值变小。因此,当距离传感器测量到的值变大时,说明对应幕墙处于向外凸出状态;当距离传感器测量到的值变小时,说明对应幕墙处于向内凹陷状态。
49.敲击机构4包括安装于齿条32上的感应件41和与感应件41信号连接的敲击组件42,感应件41用于确定齿条32的移动距离,并向敲击组件42发送感应信号。敲击组件42用于在接收到感应件41发送的感应信号后开始对幕墙进行敲击。敲击组件42安装在承重板11上。具体的,敲击组件42位于承重板11与幕墙相邻的侧面上,且与承重板11垂直设置,在实际工作时,敲击组件42以垂直于幕墙的方向对幕墙进行敲击。可选地,感应件41为压敏开关,当齿条32向下移动,使得压敏开关与承重板11接触时,压敏开关向敲击组件42发送感应信号,使敲击组件42开始工作。当然,感应件41除了可以为压敏开关外,还可以为其他。比如,感应件41还可以为压力传感器。
50.呈上述,敲击组件42还与安装在第一端上的距离传感器信号连接,敲击组件42用于在接收到距离传感器发送的凹凸程度信号后控制敲击组件42对幕墙的敲击力度。在一个示例中,敲击组件42包括电动推杆421和位于电动推杆421末端的敲击块422,电动推杆421在接收到感应信号后对幕墙进行敲击,并根据接收到的凹凸程度信号控制敲击组件42对幕墙的敲击力度。需要说明的是,这里的敲击力度包括电动推杆421向幕墙方向使出的力和敲击块422向幕墙方向移动的距离。
51.在其他示例中,敲击组件42的结构还可以为其他。比如,敲击组件42包括气缸和位于气缸连杆末端的击锤,为常规设置,在此不做赘述。
52.而为了采集到敲击组件42作用到幕墙上的振动信号,在本实施例中,活塞杆332的第二端上还安装有检测件34,检测件34用于检测作用到幕墙上的振动信号,并将该振动信号发送到地面控制台。其中,该地面控制台可以为手机,或者电脑,为常规设置,在此不详细展开。
53.为了避免检测件34在与幕墙接触时损坏,在其中一个实施例中,检测件34外包裹有缓冲胶套(未图示)。当检测件34与幕墙接触之前,首先接触缓冲胶套,随后缓冲胶套逐渐变形至最大,此时检测件34与幕墙接触。在本实施例中,检测件34为振动传感器。
54.请结合图5和图6,吸附机构5与驱动机构2相连,用以使幕墙安全检测机器人100吸附在幕墙上。具体的,吸附机构5包括空心盘52和位于空心盘52内的第二齿轮51,第一旋转轴21穿设在空心盘52内,第二齿轮51位于第一旋转轴21上,空心盘52内设有与第二齿轮51啮合的内齿圈53,第一旋转轴21带动第二齿轮51、内齿圈53旋转。
55.吸附机构5还包括管道组件54和与管道组件54连通的吸附组件55,管道组件54还与空心盘52连通,通过空心盘52内的第二齿轮51和内齿圈53旋转,使得管道组件54内产生负压,吸附组件55因负压吸附在幕墙上。进一步地,管道组件54包括吸气管541和排气管542,吸气管541、排气管542和空心盘52连通,吸气管541和排气管542上均设置有单向阀543。为了方便说明,将排气管542上的单向阀543命名为左单向阀5431,将吸气管541上的单向阀543命名为右单向阀5432。当吸附机构5开始工作时,右单向阀5432打开,第一旋转轴21带动第二齿轮51和内齿圈53同步转动,使得空心盘52内产生负压,将吸附组件55内的空气通过吸气管541吸至空心盘52内(如图5中的箭头所示),以使吸附组件55内处于真空状态,进而使整个幕墙安全检测机器人100牢牢吸附在幕墙上,随后将右单向阀5432关闭。当吸附机构5停止工作时,左单向阀5431打开,以使气体从排气管542排出至外界。
56.由于幕墙安全检测机器人100在工作时是一直吸附在幕墙上的,而为了保证幕墙安全检测机器人100在吸附的同时能够顺利的在幕墙上移动,在其中一个实施例中,将管道组件54和吸附组件55命名为一组吸附单元(未标号),吸附机构5中具有两组吸附单元。两组吸附单元交替作业,至少一组吸附单元与承重板11滑动连接,以使承重板11可沿幕墙安全检测机器人100的行进方向滑动。
57.在本实施例中,只有一组吸附单元与承重板11滑动连接。为了方便描述,将两组吸附单元分别命名为第一吸附单元和第二吸附单元,第一吸附单元与承重板11滑动连接。具体的,第一吸附单元还包括滑轨(未图示)、位于滑轨上并可在滑轨上来回滑动的滑块(未图示)以及与滑块相连并驱动滑块移动的气缸(驱动件),滑块和第一吸附单元的吸附组件55相连。当气缸的连杆驱动滑块带动第一吸附单元的吸附组件55在滑轨上向前移动时,该吸附组件55不工作,第二吸附单元的吸附组件55工作,此时,整个幕墙安全检测机器人100由第二吸附单元的吸附组件55产生负压吸附在幕墙上;在第一吸附单元的吸附组件55向前移动至一定距离后,第一吸附单元的吸附组件55停止移动并开始工作产生负压,此时,第二吸附单元的吸附组件55不工作,整个幕墙安全检测机器人100由第一吸附单元的吸附组件55产生负压吸附在幕墙上;随后,气缸的连杆因为要回缩,因此会带动整个承重板11向前移动,进而实现幕墙安全检测机器人100在幕墙上行走。
58.在其他实施例中,两组吸附单元均可与承重板11滑动连接,本技术不对此作限定。
59.呈上述,每组吸附组件55包括吸附箱551和与吸附箱551连通的吸附柱552,吸附柱552上设置有吸口(未图示),吸口上设置有密封圈(未图示),用于增强吸附组件55的密封性能,使得吸附组件55能够适应不同粗糙程度的幕墙。
60.为了保证吸附组件55的吸附力一直有效,将吸附柱552的数量设置为多个,每个吸附柱552上设置有一个阀门(未图示),当吸附组件55内处于真空状态时,每个吸附柱552上的阀门关闭。多个吸附柱552使得幕墙安全检测机器人100在移动的过程中,即使有部分吸附柱552因自身出现裂缝,或者在与密封胶缝接触时出现漏气,安全检测机器人100依旧可以通过其余吸附柱552吸附在幕墙上,进而提高幕墙安全检测机器人100的使用安全性。在
本实施例中,吸附柱552的数量设置为四个,四个吸附柱552均与吸附箱551连通。
61.为了便于幕墙安全检测机器人100在幕墙上移动,还包括行走机构6,行走机构6用于控制幕墙安全检测机器人100在幕墙上移动,以对不同位置的幕墙进行坠落风险检测。具体的,行走机构6包括两组行走组件61,任一组行走组件61包括相对设置的两个行走轮611以及分别连接两个行走轮611的转动杆612,转动杆612上还设有连接板613,连接板613与承重板11相连。两组行走组件61中的其中一个转动杆612上还设有第三齿轮614,第三齿轮614与第一非完全齿轮22间隙啮合,第一非完全齿轮22带动第三齿轮614、转动杆612、行走轮611转动。需要说明的是,在本实施例中,当第一非完全齿轮22和第三齿轮614啮合时,其与第一齿轮316不啮合;当第一非完全齿轮22和第一齿轮316啮合时,其与第三齿轮614不啮合。即,当行走组件61带动幕墙安全检测机器人行走时,距离确定机构3不工作;当距离确定机构3工作时,行走组件61停止工作。可选地,行走轮611外包覆有橡胶垫(未图示),橡胶垫上开设有防滑纹(未图示)。如此设置,增大了行走轮611与幕墙之间的摩擦力,避免了在移动时打滑的问题。
62.请结合图7,图7为本技术一种具有吸附结构的幕墙安全检测机器人的工作方法的流程图,该方法应用于上述的幕墙安全检测机器人中。如图所示,该方法包括:
63.s1:将幕墙安全检测机器人100放置到幕墙上,吸附机构5工作以使幕墙安全检测机器人100吸附在幕墙上。
64.具体的,第一旋转轴21带动第二齿轮51、内齿圈53旋转,空心盘52内产生负压,将吸附组件55内的空气通过吸气管541吸至空心盘52内,再通过排气管542排出至外界,致使整个幕墙安全检测机器人100牢牢吸附在幕墙上。
65.s2:驱动机构2驱动距离确定机构3工作,通过距离传感器测量活塞杆332在活塞筒331内的移动距离,以确定幕墙的凹凸程度,并将凹凸程度信号发送给敲击机构4。
66.具体的,驱动电机带动第一旋转轴21、第一非完全齿轮22旋转,齿轮组件31跟随第一非完全齿轮22旋转并带动齿条32、活塞组件33向下滑动,当齿条32带动活塞组件33向下移动至与幕墙接触时,活塞筒331内的活塞杆332会克服弹性件333的弹力向靠近齿条32的方向移动,通过距离传感器测量活塞杆在活塞筒内的移动距离,以确定幕墙的凹凸程度。
67.s3:在敲击组件42接收到感应件41发送的感应信号后对幕墙进行敲击,并根据接收到的凹凸程度信号控制敲击组件42对幕墙的敲击力度。
68.s4:通过检测件34来检测作用到幕墙上的振动信号。
69.检测件34将检测到的振动信号发送到地面控制台,由地面控制台分析振动信号,判断玻璃幕墙的可靠性级别。
70.综上,本技术提供了一种具有吸附结构的幕墙安全检测机器人,通过距离传感器来测量活塞杆在活塞筒内的移动距离,以确定幕墙的凹凸程度,并将凹凸程度信号发送给敲击机构,随后在敲击组件在接收到感应件发送的感应信号后开始对幕墙进行敲击,并根据接收到的凹凸程度信号控制敲击组件对幕墙的敲击力度,最后通过检测件来检测作用到幕墙上的振动信号,可以解决传统的幕墙检测装置造成的幕墙损坏或检测结果不准确的问题。
71.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存
在矛盾,都应当认为是本说明书记载的范围。
72.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
