1.本发明涉及多轿厢电梯控制装置。
背景技术:
2.专利文献1公开了一种多电梯系统。根据该多电梯系统,能够提高电梯的运行效率。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2016-124682号公报
技术实现要素:
6.发明要解决的课题
7.然而,专利文献1所记载的多电梯系统只是在多台轿厢中共享门的开闭指令。因此,无法缩短门的开闭时间。
8.本发明是为了解决上述课题而完成的。本发明的目的在于提供能够缩短门的开闭时间的多轿厢电梯控制装置。
9.用于解决课题的手段
10.本发明的多轿厢电梯控制装置具备开闭指令判定部,该开闭指令判定部在具备在水平投影面上重叠的多台轿厢的电梯系统中,根据特定轿厢的轿厢门动作时的电机的速度或电流来变更其它轿厢的轿厢门的控制参数。
11.发明效果
12.根据本发明,多轿厢电梯控制装置在具备在水平投影面上重叠的多台轿厢的电梯系统中,根据特定轿厢的轿厢门动作时的电机的速度或电流来变更其它轿厢的轿厢门的控制参数。因此,能够缩短门的开闭时间。
附图说明
13.图1是实施方式1的多轿厢电梯系统的结构图。
14.图2是实施方式1的多轿厢电梯系统的第1轿厢门和层站门的主视图。
15.图3是用于说明实施方式1的多轿厢电梯系统的第1轿厢门等与层站门之间的关系的俯视图。
16.图4是用于说明实施方式1的多轿厢电梯系统的第1轿厢门控制装置的学习功能的框图。
17.图5是示出实施方式1的多轿厢电梯系统的第1轿厢门控制装置起到的门开闭的学习效果的图。
18.图6是用于说明实施方式1的多轿厢电梯系统的多轿厢电梯控制装置的动作的流程图。
19.图7是实施方式1的多轿厢电梯的多轿厢电梯控制装置的硬件结构图。
20.图8是用于说明实施方式2的多轿厢电梯系统的第1轿厢门控制装置的学习功能的框图。
21.图9是示出实施方式2的多轿厢电梯系统的第1轿厢门控制装置起到的门开闭的学习效果的图。
22.图10是用于说明实施方式2的多轿厢电梯系统的多轿厢电梯控制装置的动作的流程图。
23.图11是用于说明实施方式3的多轿厢电梯的第1轿厢门控制装置的诊断功能的框图。
具体实施方式
24.依照附图对实施方式进行说明。另外,在各图中,对相同或相当的部分标注相同的标号。适当简化或省略该部分的重复说明。
25.实施方式1.
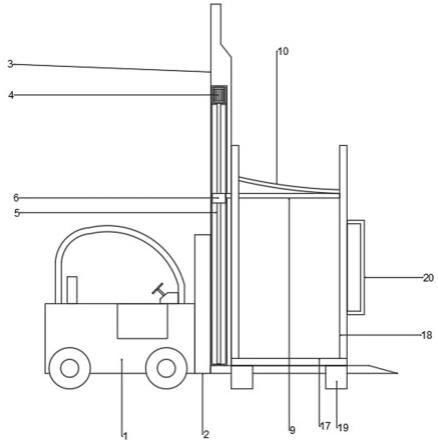
26.图1是实施方式1的多轿厢电梯系统的结构图。
27.在图1中,电梯的井道1设置于未图示的建筑物。井道1形成为贯穿建筑物的各楼层。未图示的多个层站分别设置于建筑物的各楼层。多个层站分别与井道1相对。未图示的多个层站的出入口分别形成于多个层站。多个层站门a分别设置于多个层站出入口中的各个层站出入口。
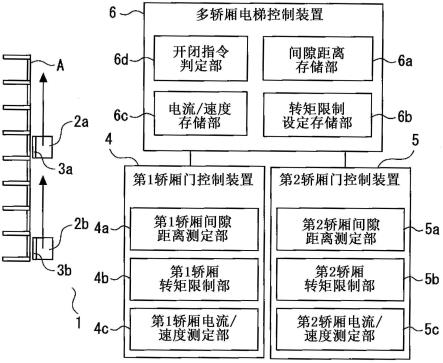
28.第1轿厢2a和第2轿厢2b设置于井道1的内部。第1轿厢2a和第2轿厢2b配置成在一个井道1中在水平投影面上重叠。未图示的第1轿厢出入口形成于第1轿厢2a。未图示的第2轿厢出入口形成于第2轿厢2b。第1轿厢门3a设置于第1轿厢出入口。第2轿厢门3b设置于第2轿厢出入口。
29.第1轿厢门控制装置4与第1轿厢2a连接。第1轿厢门控制装置4具备第1轿厢间隙距离测定部4a、第1轿厢转矩限制部4b和第1轿厢电流/速度测定部4c。
30.第2轿厢门控制装置5与第1轿厢2b连接。第2轿厢门控制装置5具备第2轿厢间隙距离测定部5a、第2轿厢转矩限制部5b和第2轿厢电流/速度测定部5c。
31.多轿厢电梯控制装置6与第1轿厢门控制装置4和第2轿厢门控制装置5连接。多轿厢电梯控制装置6具备间隙距离存储部6a、转矩限制设定存储部6b、电流/速度存储部6c和开闭指令判定部6d。
32.接下来,使用图2对第1轿厢门3a、第2轿厢门3b和层站门a进行说明。
33.图2是实施方式1的多轿厢电梯系统的第1轿厢门和层站门的主视图。
34.如图2所示,第1轿厢门3a是单开式的门。在第1轿厢门3a中,一对轿厢门板7对轿厢出入口进行开闭。
35.第1组导靴(shoe)8设置于一对轿厢门板7中的一方的下端。第1组导靴8通过在未图示的地坎的槽的内部移动而对一对轿厢门板7中的一方的水平移动进行引导。第2组导靴8设置于一对轿厢门板7中的另一方的下端。第2组导靴8通过在未图示的地坎的槽的内部移动而对一对轿厢门板7中的另一方的水平移动进行引导。
36.一对吊架9分别设置于一对轿厢门板7的上端。横梁10以长度方向成为水平方向的
方式设置于轿厢出入口的上缘部。导轨11以长度方向成为水平方向的方式设置于横梁10。
37.第1组悬吊滚轮12设置于一对吊架9中的一方。第1组悬吊滚轮12通过沿着导轨11移动而对一对吊架9中的一方的水平移动进行引导。第2组悬吊滚轮12设置于一对吊架9中的另一方。第2组悬吊滚轮12通过沿着导轨11移动而对一对吊架9中的另一方的水平移动进行引导。
38.第1组止推轮(upthrust roller)13设置于一对吊架9中的一方。第1组止推轮13配置于导轨11的下方。第1组止推轮13对第1组悬吊滚轮12从导轨11脱落的情况进行抑制。第2组止推轮13设置于一对吊架9中的另一方。第2组止推轮13配置于导轨11的下方。第2组止推轮13对第2组悬吊滚轮12从导轨11脱落的情况进行抑制。
39.一对带轮14在横梁10上分开设置。带15形成为环状。带15绕挂在一对带轮14上。在一对带轮14各自的外周面形成有未图示的槽。
40.带15是传导带。带15根据一对带轮14各自的槽的形状而设定。例如,带15是齿型带或v型带。带15的张力通过变更一对带轮14的距离来调节。
41.带保持件16的上端与带15连结。一对轿厢门刀17与带保持件16的下端连结。电机18对一对带轮14中的一方进行驱动。
42.当通过第1轿厢门控制装置4对电机18通电时,一对带轮14中的一方旋转。带15追随一对带轮14中的一方的旋转而移动。轿厢门刀17借助带保持件16追随带保持件16而移动。一对轿厢门板7中的一方与轿厢门刀17连结。一对轿厢门板7中的另一方经由带15接受驱动力。其结果是,一对门板向同一方向移动。
43.在第1轿厢门3a中,具备未图示的机械式的关门力产生机构和开门力产生机构。关门力产生机构使得即使在第1轿厢2a的内部发生被困并且电机18的电驱动力消失的情况下,幼儿也不会撬开第1轿厢门3a而落下到井道1中。开门力产生机构使得即使在第1轿厢门3a全开时没有电机18的驱动力的情况下、或者电机18的驱动力较小的情况下,也能够保持第1轿厢门3a全开。
44.虽然未图示,但第2轿厢门3b的结构也与第1轿厢门3a的结构相同。
45.层站门a的结构除驱动系统外,也与第1轿厢门3a的结构相同。一对层站门板19设置于层站出入口。层站滚轮20设置于一对层站门板19中的一方。在第1轿厢门3a或第2轿厢门3b与层站门a的高度大致一致时,如果对电机18通电,则层站滚轮20与轿厢门刀17接触,由此,第1轿厢门3a或第2轿厢门3b的驱动力被传递至层站门a。其结果是,一对层站门板19打开。
46.在层站门a安装有未图示的关门力产生机构。关门力产生机构由重物、弹簧等形成。关门力产生机构以使得即使在第1轿厢2a或第2轿厢2b未停层的状态下层站门a打开的情况下也自动全闭的方式产生机械性外力。
47.另外,在双开门中,可以通过设定成一对轿厢门板7通过带15彼此向相反方向移动,来对轿厢出入口进行开闭。
48.接下来,使用图3对第1轿厢门3a等与层站门a之间的关系进行说明。
49.图3是用于说明实施方式1的多轿厢电梯系统的第1轿厢门等与层站门之间的关系的俯视图。
50.如图3所示,轿厢门刀17在井道1的内部移动。另一方面,层站滚轮20突出至井道1
中。当在第1轿厢2a或第2轿厢2b进行升降时与第1轿厢2a或第2轿厢2b的设备接触时,层站滚轮20发生损伤。特别是,若层站滚轮20与一对轿厢门刀17接触,则双方均发生损伤。
51.因此,需要以使得在第1轿厢2a或第2轿厢2b升降时的门全闭状态下轿厢门刀17与层站滚轮20之间的间隙距离x保持恒定的方式来进行机械系统的调节。间隙距离越短,则在发生了安装时的设定错误、时效变化引起的形状变化、以及第1轿厢门3a、第2轿厢门3b、层站门a中的任意的门的变形时,设备发生损伤的可能性越大。
52.如图3的(a)所示,在第1轿厢门3a等全闭时,轿厢门刀17与层站滚轮20分开间隙距离x的量。当电机18根据开门指令而开始第1轿厢门3a等的打开动作时,轿厢门刀17被向开门方向驱动。如图3的(b)所示,轿厢门刀17在向开门方向移动了间隙距离x的量的距离的时刻与层站滚轮20接触。然后,如图3的(c)所示,在开门过程中,一对轿厢门刀17在抓持着轿厢门的状态下将轿厢门与层站门a连结。与此同时,一对轿厢门刀17将层站滚轮20完全夹在其间地进行驱动。
53.图3的间隙距离x是全闭侧的轿厢门刀17与层站滚轮20之间的距离。如果一对卡合门刀之间的距离是已知的,则全开侧的轿厢门刀17与层站滚轮20之间的距离能够根据间隙距离x和层站滚轮20的尺寸来计算。
54.接下来,使用图4对第1轿厢门控制装置的学习功能进行说明。
55.图4是用于说明实施方式1的多轿厢电梯系统的第1轿厢门控制装置的学习功能的框图。
56.在图4的第1轿厢门控制装置4中,速度指令生成部21a输出作为开闭动作的目标的速度指令。在实际的驱动装置中,会产生垃圾堵塞等导致的行驶阻力、门板变形导致的摩擦损耗、以及门板驱动中与物体的接触等干扰。因此,需要由速度控制部21b来对与实际速度之间的速度误差进行校正。电机18的驱动被控制为,使得实际速度v以规定的时间间隔追随作为目标的速度指令值v
*
。
57.例如,速度控制部21b是以传递函数cb(s)=k
sp
k
si
/s示出的反馈控制器。其中,k
sp
是比例增益。k
si
是积分增益。
58.转矩限制部21c将作为速度控制部21b的输出的转矩作为输入。转矩限制部21c输出电机18的电流指令值。在开闭过程中的门板与人体发生接触的情况下,实际速度v与速度指令值v
*
产生差异,转矩限制部21c限制转矩,以使得结果是不会将能量过剩地施加给人体。
59.电流控制部21d控制对电流检测器的检测电流值进行反馈并被提供给电动机18的电流值,以便根据电动机18的电流指令值向电动机18供给电流。电流控制部21d的输出经由pwm逆变器被输入到电机18。其结果是,产生用于进行门的开闭的驱动力。
60.例如,传感器e是编码器、旋变器。传感器e对电机18的旋转进行检测。传感器e输出电机18的旋转位置。
61.速度运算部21e通过每规定时间对所输入的旋转位置进行采样来运算出转速,然后进行输出。
62.也可以取代传感器e而使用检测电流值来估计电机18的旋转位置或转速。
63.间隙距离测定部21f使用作为转矩限制部21c的输出的电机18的电流指令值或作为速度运算部21e的输出的电机18的转速即实际速度来检测轿厢门的卡合门刀与层站门a
的层站滚轮20的接触。间隙距离测定部21f输出检出时的电机18的旋转位置。这时,测定出的间隙距离被传送到多轿厢电梯控制装置6。
64.电流测定部21g保存作为转矩限制部21c的输出的电机18的电流指令值。速度测定部21h保存作为速度运算部21e的输出的实际速度。
65.干扰补偿部21i预先补偿层站门a的关门力产生机构产生的机械性外力、以及轿厢门的机械式的门开闭力产生机构产生的已知的外力。当在机械性外力以外,由于面板变形等而在轿厢门或层站门a也产生外力的情况下,干扰补偿部21i通过预先补偿学习到的外力来提高实际速度v对速度指令值v
*
的追随性。
66.第2轿厢门控制装置5的结构也与第1轿厢门控制装置4的结构相同。
67.在多轿厢电梯控制装置6中,间隙距离存储部6a存储第1轿厢门控制装置4和第2轿厢门控制装置5的间隙距离测定部21f的测定结果。
68.在第1轿厢2a和第2轿厢2b没有发生利用者导致的载荷偏倚、以及机械系统的异常导致的倾斜的情况下,从刚安装时起的间隙距离的变动是由于层站滚轮20的位置偏移造成的。
69.开闭指令判定部6d判定,第1轿厢2a上次停层在同一楼层并测定的间隙距离相对于第1轿厢2a本次对门进行开闭并测定的间隙距离的变动量为层站滚轮20的位置偏移。开闭指令判定部6d对第2轿厢2b上次停层在同一楼层并对门进行开闭而测定的间隙距离加上变动量,并更新用于第2轿厢2b接下来进行开闭的间隙距离。开闭指令判定部6d将更新后的间隙距离发送给第2轿厢门控制装置5的速度指令生成部21a。
70.在第1轿厢2a和第2轿厢2b发生了利用者导致的载荷偏倚、以及机械系统的异常导致的轿厢倾斜的情况下,只要能够利用加速度传感器等计测出轿厢的倾斜,就能够排除轿厢的倾斜造成的影响。在无法直接利用传感器进行计测的情况下,在没有利用者的维护模式下存储由同一楼层处的第1轿厢2a和第2轿厢2b的倾斜引起的间隙距离的差即可。在该情况下,开闭指令判定部6d通过对针对第1轿厢2a测定出的间隙距离加减上述差,来判定第2轿厢2b在同一楼层处的间隙距离。
71.另外,关于利用者导致的载荷偏倚的影响,也可以估计根据额定人数所设想的轿厢的倾斜。利用者的有无可以通过计测利用者造成的轿厢载荷变动的装置、例如轿厢的称量装置来检测。
72.接下来,使用图5对门的开闭的学习进行说明。
73.图5是示出实施方式1的多轿厢电梯系统的第1轿厢门控制装置起到的门开闭的学习效果的图。
74.在电梯从全闭开门时,只有第1轿厢门3a等动作。然后,第1轿厢门3a等的卡合门刀与层站滚轮20接触,由此,第1轿厢门3a等与层站门a连结。若在该连结之前第1轿厢门3a等以高速开门,则轿厢门刀17与层站滚轮20的接触所导致的冲击声增加。由于冲击的影响,悬吊于导轨11的第1轿厢门3a等的面板或层站门a的面板晃动,从而美观性可能恶化。
75.因此,第1轿厢门3a等以低速动作,直到轿厢门刀17与层站滚轮20接触为止。然后,第1轿厢门3a等在与层站门a连结之后再加速。这时,在进行卡合的层站门a的位置不明确时,通过将再加速的第1轿厢门3a等的位置设定为以间隙距离设想的最大值,而能够降低冲击声,也能够减轻冲击引起的门板的晃动。但是,开门时间变长。
76.针对于此,多轿厢电梯控制装置6根据在第1轿厢2a以及第2轿厢2b中的一方中测定出的间隙距离的变动来估计接下来要停层的第1轿厢2a以及第2轿厢2b中的另一方的间隙距离。因此,在由于利用者或台车与层站门板19的接触而导致层站滚轮20的位置偏移的情况下,第1轿厢门3a等的低速动作区间始终为最短。进而,能够缩短第1轿厢门3a等的开闭时间。
77.接下来,利用图6对多轿厢电梯控制装置6的动作进行说明。
78.图6是用于说明实施方式1的多轿厢电梯系统的多轿厢电梯控制装置的动作的流程图。
79.在步骤s1中,多轿厢电梯控制装置6判定第1轿厢2a是否已停层在n层。
80.当在步骤s1中判定为第1轿厢2a未停在n层的情况下,多轿厢电梯控制装置6进行步骤s2的动作。
81.在步骤s2中,多轿厢电梯控制装置6判定第2轿厢2b是否已停层在n层。
82.当在步骤s2中判定为第2轿厢2b未停在n层的情况下,多轿厢电梯控制装置6进行步骤s1的动作。
83.当在步骤s1中判定为第1轿厢2a已停层在n层的情况下,多轿厢电梯控制装置6进行步骤s3的动作。
84.在步骤s3中,多轿厢电梯控制装置6判定n层的间隙距离是否已被更新。
85.当在步骤s3中判定为n层的间隙距离已被更新的情况下,多轿厢电梯控制装置6进行步骤s4的动作。在步骤s4中,多轿厢电梯控制装置6设定第1轿厢门3a的再加速位置。
86.当在步骤s3中判定为n层的间隙距离未被更新的情况下或者在步骤s4之后,多轿厢电梯控制装置6进行步骤s5的动作。在步骤s5中,多轿厢电梯控制装置6通过使电梯的门开闭来测定间隙距离。
87.然后,多轿厢电梯控制装置6进行步骤s6的动作。在步骤s6中,多轿厢电梯控制装置6判定间隙距离是否发生了变动。
88.当在步骤s6中判定为间隙距离发生了变动的情况下,多轿厢电梯控制装置6进行步骤s7的动作。在步骤s7中,多轿厢电梯控制装置6发送n层的距离变动量。
89.当在步骤s6中判定为间隙距离未发生变动的情况下或者在步骤s7之后,多轿厢电梯控制装置6结束动作。
90.当在步骤s2中判定为第2轿厢2b已停层在n层的情况下,多轿厢电梯控制装置6进行步骤s8的动作。
91.在步骤s8中,多轿厢电梯控制装置6判定n层的间隙距离是否已被更新。
92.当在步骤s8中判定为n层的间隙距离已被更新的情况下,多轿厢电梯控制装置6进行步骤s9的动作。在步骤s9中,多轿厢电梯控制装置6设定第2轿厢门3b的再加速位置。
93.当在步骤s8中判定为n层的间隙距离未被更新的情况下或者在步骤s9之后,多轿厢电梯控制装置6进行步骤s10的动作。在步骤s10中,多轿厢电梯控制装置6通过使电梯的门开闭来测定间隙距离。
94.然后,多轿厢电梯控制装置6进行步骤s11的动作。在步骤s11中,多轿厢电梯控制装置6判定间隙距离是否发生了变动。
95.当在步骤s11中判定为间隙距离发生了变动的情况下,多轿厢电梯控制装置6进行
步骤s7的动作。
96.当在步骤s11中判定为间隙距离未发生变动的情况下,多轿厢电梯控制装置6结束动作。
97.根据在以上内容中进行了说明的实施方式1,多轿厢电梯控制装置6根据在特定轿厢的轿厢门动作时的电机的速度或电流来变更其它轿厢的轿厢门的控制参数。因此,能够缩短门的开闭时间。
98.例如,多轿厢电梯控制装置6将各楼层处的轿厢门与层站门之间的间隙距离作为上述控制参数,根据在一方的轿厢门处估计出的间隙距离来变更要停层到该楼层的另一方的轿厢门的开门再加速位置。因此,能够更可靠地缩短门的开闭时间。
99.接下来,利用图7对多轿厢电梯控制装置6的例子进行说明。
100.图7是实施方式1的多轿厢电梯系统的多轿厢电梯控制装置的硬件结构图。
101.多轿厢电梯控制装置6的各功能可以通过处理电路来实现。例如,处理电路具备至少一个处理器100a和至少一个存储器100b。例如,处理电路具备至少一个专用的硬件200。
102.在处理电路具备至少一个处理器100a和至少一个存储器100b的情况下,多轿厢电梯控制装置6的各功能通过软件、固件、或软件和固件的组合来实现。软件和固件中的至少一方被记述为程序。软件和固件中的至少一方存储在至少一个存储器100b中。至少一个处理器100a通过读出并执行存储在至少一个存储器100b中的程序,来实现多轿厢电梯控制装置6的各功能。至少一个处理器100a也称为中央处理装置、处理装置、运算装置、微处理器、微型计算机、dsp。至少一个存储器100b例如为ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、闪存、eprom(erasable programmable read only memory:可擦可编程只读存储器)、eeprom(electrically erasable programmable read only memory:电可擦可编程只读存储器)等非易失性或易失性的半导体存储器、磁盘、软盘、光盘、cd(compact disk:紧凑型光盘)、迷你盘(mini disc)、dvd(digital versatile disk:数字多功能盘)等。
103.在处理电路具备至少一个专用的硬件200的情况下,处理电路例如通过单一电路、复合电路、编程处理器、并行编程处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field programmable gate array:现场可编程门阵列)、或者它们的组合来实现。例如,多轿厢电梯控制装置6的各功能分别通过处理电路来实现。例如,多轿厢电梯控制装置6的各功能集中通过处理电路来实现。
104.对于多轿厢电梯控制装置6的各功能,也可以通过专用的硬件200来实现一部分,通过软件或固件来实现另一部分。例如,也可以通过作为专用的硬件200的处理电路来实现开闭指令判定部6d的功能,并通过由至少一个处理器100a读出并执行存储在至少一个存储器100b中的程序来实现开闭指令判定部6d的功能以外的功能。
105.这样,处理电路通过硬件200、软件、固件、或者它们的组合来实现多轿厢电梯控制装置6的各功能。
106.虽然未图示,但第1轿厢门控制装置4的各功能也通过与实现多轿厢电梯控制装置6的各功能的处理电路同等的处理电路来实现。第2轿厢门3b的控制装置的各功能也通过与实现多轿厢电梯控制装置6的各功能的处理电路同等的处理电路来实现。
107.实施方式2.
108.图8是用于说明实施方式2的多轿厢电梯系统的第1轿厢门控制装置的学习功能的框图。另外,对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
109.在图8中,例如,若在第1轿厢门3a等或层站门a的面板与利用者或台车碰撞而发生了变形时要维持与速度指令值相同的实际速度时,则能够通过增大转矩而对第1轿厢门3a等进行开闭。例如,若当在悬吊滚轮12与导轨11之间混入了异物时要维持与速度指令值相同的实际速度时,则能够通过增大转矩而对第1轿厢门3a等进行开闭。例如,若当在导靴8与地坎的槽之间混入了异物时要维持与速度指令值相同的实际速度时,则能够通过增大转矩而对第1轿厢门3a等进行开闭。
110.在增大后的转矩达到预先设定的限制值的情况下,若第1轿厢门3a等没有按照规定的限制值的设定移动,则第1轿厢门3a等通过进行反转运动来重试开门动作或关门动作。
111.在第1轿厢门3a等反复进行反转动作的情况下,如果原因是与人体接触,则不应变更转矩限制值。另一方面,如果原因是面板变形、异物混入,则应通过提高转矩限制值来对第1轿厢门3a等进行开闭,从而继续向利用者提供服务。
112.与人体的接触能够通过安装于门的光传感器、声波传感器、机械式的开关动作而检测出来。另一方面,面板变形、异物混入则无法由光传感器等检测出来。由此可以区分原因是否为与人体的接触。
113.在不是与人体的接触的情况下,转矩限制部21c判定为面板变形、异物混入导致的损耗增大。
114.第2轿厢门3b的控制装置将停层在了特定楼层并且将门打开至全开或者关闭至全闭的第2轿厢2b的转矩限制值发送给多轿厢电梯控制装置6。当在上次第2轿厢2b在同一楼层进行了开闭时的设定和转矩限制值已被变更的情况下,多轿厢电梯控制装置6将转矩限制值发送给第1轿厢门控制装置4。第1轿厢门控制装置4将转矩限制值的变更量反映到接下来要停层到同一楼层并对第1轿厢门3a进行开闭的第1轿厢2a的转矩限制值中。
115.接下来,使用图9对转矩限制值的变更进行说明。
116.图9是示出实施方式2的多轿厢电梯系统的第1轿厢门控制装置起到的门开闭的学习效果的图。
117.如图9所示,在不是与人体的接触的情况下,转矩限制部21c判定为面板变形、异物混入导致的损耗增大。这时,转矩限制部21c在相应位置处提高转矩限制值。其结果是,即使在异物混入导致的损耗增大的情况下,第1轿厢2a等也会在开门时到达全开位置。第1轿厢2a等在关门时到达全闭位置。
118.接下来,利用图10对多轿厢电梯控制装置6的动作进行说明。
119.图10是用于说明实施方式2的多轿厢电梯系统的多轿厢电梯控制装置的动作的流程图。
120.在步骤s21中,多轿厢电梯控制装置6判定第1轿厢2a是否已停层在n层。
121.当在步骤s21中判定为第1轿厢2a未停在n层的情况下,多轿厢电梯控制装置6进行步骤s22的动作。
122.在步骤s22中,多轿厢电梯控制装置6判定第2轿厢2b是否已停层在n层。
123.当在步骤s22中判定为第2轿厢2b未停在n层的情况下,多轿厢电梯控制装置6进行步骤s21的动作。
124.当在步骤s21中判定为第1轿厢2a已停层在n层的情况下,多轿厢电梯控制装置6进行步骤s23的动作。
125.在步骤s23中,多轿厢电梯控制装置6判定n层的转矩限制值是否已被更新。
126.当在步骤s23中判定为n层的转矩限制值已被更新的情况下,多轿厢电梯控制装置6进行步骤s24的动作。在步骤s24中,多轿厢电梯控制装置6设定第1轿厢门3a的转矩限制值。
127.当在步骤s23中判定为n层的转矩限制值未被更新的情况下或者在步骤s24之后,多轿厢电梯控制装置6进行步骤s25的动作。在步骤s25中,多轿厢电梯控制装置6通过使电梯的门开闭来学习转矩限制值。
128.然后,多轿厢电梯控制装置6进行步骤s26的动作。在步骤s26中,多轿厢电梯控制装置6判定转矩限制值是否发生了变动。
129.当在步骤s26中判定为转矩限制值发生了变动的情况下,多轿厢电梯控制装置6进行步骤s27的动作。在步骤s27中,多轿厢电梯控制装置6发送n层的距离变动量。
130.当在步骤s26中判定为转矩限制值未发生变动的情况下或者在步骤s27之后,多轿厢电梯控制装置6结束动作。
131.当在步骤s22中判定为第2轿厢2b已停层在n层的情况下,多轿厢电梯控制装置6进行步骤s28的动作。
132.在步骤s28中,多轿厢电梯控制装置6判定n层的转矩限制值是否已被更新。
133.当在步骤s28中判定为n层的转矩限制值已被更新的情况下,多轿厢电梯控制装置6进行步骤s29的动作。在步骤s29中,多轿厢电梯控制装置6设定第2轿厢门3b的转矩设定值。
134.当在步骤s28中判定为n层的转矩限制值未被更新的情况下或者在步骤s29之后,多轿厢电梯控制装置6进行步骤s30的动作。在步骤s30中,多轿厢电梯控制装置6通过使电梯的门开闭来学习转矩限制值。
135.然后,多轿厢电梯控制装置6进行步骤s31的动作。在步骤s31中,多轿厢电梯控制装置6判定转矩限制值是否发生了变动。
136.当在步骤s31中判定为转矩限制值发生了变动的情况下,多轿厢电梯控制装置6进行步骤s27的动作。
137.当在步骤s31中判定为转矩限制值未发生变动的情况下,多轿厢电梯控制装置6结束动作。
138.根据在以上内容中进行了说明的实施方式2,第2轿厢2b的转矩限制值的变更量被反映给第1轿厢2a。因此,即使由于面板变形、异物混入而导致损耗增大,也能够削减在第1轿厢2a中进行学习的无用时间。
139.另外,在由于面板变形、异物混入而导致损耗增大,通过变更转矩限制部21c来对门进行开闭的情况下,速度指令值与实际速度之间的速度误差由速度控制部21b来进行校正。这时,由于损耗的增大,存在实际速度相对于速度指令值产生延迟的情况。在该情况下,在第1轿厢2a等产生外力的情况下,只要在干扰补偿部21i中预先补偿学习到的外力即可。具体而言,在干扰补偿部21i中,可以反映出与从全闭或全开的第1门等的位置、或者接收到开闭指令后的时刻对应的在其它轿厢中计测出的转矩变动。在该情况下,能够实现对速度
指令值v
*
的追随性较高的实际速度v。因此,能够使第1轿厢门3a等在由速度指令值确定的时间下进行开闭。其结果是,能够对利用者提供稳定的时间下的第1门等的动作。
140.实施方式3.
141.图11是用于说明实施方式3的多轿厢电梯系统的第1轿厢门控制装置的诊断功能的框图。另外,对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
142.在图11的第1轿厢门控制装置4中,电流测定部21g保存电机18的电流指令值,该电机18的电流指令值是在某个楼层对门进行了开闭的第1轿厢2a中的转矩限制部21c的输出。也可以是电流检测器的检测电流值而不是电流指令值。电流测定部21g根据从全闭或全开的门位置、或者接收到开闭指令后的时刻而将电机18的电流指令值信息发送给多轿厢电梯控制装置6的电流存储部。
143.速度测定部21h保存作为速度运算部21e的输出的实际速度。速度测定部21h根据从全闭或全开的门位置、或者接收到开闭指令后的时刻而将实际速度信息发送给多轿厢电梯控制装置6的速度存储部。
144.第2轿厢门3b的控制装置也与第1轿厢门控制装置4同样地动作。
145.在多轿厢电梯控制装置6中,轿厢门状态判定部6e通过存储在同一楼层进行了开闭的第1轿厢2a和第2轿厢2b的电流和速度来判定第1轿厢门3a等的异常。例如,在能够根据电流来估计的第1轿厢门3a的行驶损耗大于第2轿厢2b的情况下,轿厢门状态判定部6e判定为存在第1轿厢门3a的行驶损耗增大的倾向。
146.也可以在存在三台以上的多台轿厢的情况下,将行驶损耗最小的轿厢作为基准来判定其它轿厢。在许多轿厢的行驶损耗类似的情况下,将行驶损耗极大或极小的轿厢判定为异常即可。
147.根据在以上内容中进行了说明的实施方式3,多轿厢电梯控制装置6根据在同一楼层进行了开闭的第1轿厢2a和第2轿厢2b的电流或速度来判定第1轿厢门3a等的异常状态。因此,能够限定维护人员进行的作业的对象。其结果是,能够缩短第1轿厢门3a等的异常时的维护作业时间。
148.例如,如果将电梯刚安装后在各楼层进行了开闭的第1轿厢2a和第2轿厢2b的电流或速度作为安装时的数据预先进行存储,则通过与在安装后对第1轿厢2a和第2轿厢2b所测定的数据进行比较,能够通过转矩变动对特定楼层处的第1轿厢门3a等和层站门a进行诊断。
149.在此,在特定楼层,仅凭第1轿厢门3a的从刚安装时起的转矩变动较大,无法判断是轿厢门和层站门中的哪一方异常。在该状态下,如果在同一楼层测定出的、第2轿厢门3b从刚安装时起的转矩变动也较大,则能够判定为层站门a异常。与此相对,如果在同一楼层测定出的第2轿厢门3b从刚安装时起的转矩变动不大,则能够判定为第1轿厢2a的轿厢门异常。
150.即使不是电梯刚安装之后的数据,只要是比本次所测定的数据早的数据,就能够通过相同的比较来判定第1轿厢门3a等的异常。
151.这时,只要通过定期地取得数据来掌握电流或速度的趋势,就也能够掌握第1轿厢门3a等的异常产生的倾向。其结果是,能够提高第1轿厢门3a等的诊断精度。
152.另外,在为三台以上的多台轿厢的情况下也是同样的。
153.产业上的可利用性
154.如上所述,本发明的多轿厢电梯控制装置能够用于电梯系统。
155.标号说明
156.1:井道;2a:第1轿厢;2b:第2轿厢;3a:第1轿厢门;3b:第2轿厢门;4:第1轿厢门控制装置;4a:第1轿厢间隙距离测定部;4b:第1轿厢转矩限制部;4c:第1轿厢电流/速度测定部;5:第2轿厢门控制装置;5、5a:第2轿厢间隙距离测定部;5b:第2轿厢转矩限制部;5c:第2轿厢电流/速度测定部;6:多轿厢电梯控制装置;6a:间隙距离存储部;6b:转矩限制设定存储部;6c:电流/速度存储部;6d:开闭指令判定部;6e:轿厢门状态判定部;7:轿厢门板;8:导靴;9:吊架;10:横梁;11:导轨;12:悬吊滚轮;13:止推轮;14:带轮;15:带;16:带保持件;17:轿厢门刀;18:电机;19:层站门板;20:层站滚轮;21a:速度指令生成部;21b:速度控制部;21c:转矩限制部;21d:电流控制部;21e:速度运算部;21f:间隙距离测定部;21g:电流测定部;21h:速度测定部;21i:干扰补偿部;100a:处理器;100b:存储器;200:硬件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。