1.本发明属于大气污染控制技术领域,具体涉及一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统和方法。
背景技术:
2.大气污染不仅受机动车尾气、燃煤排放和工业排放等人为活动影响,与气象条件的变化也息息相关。例如在低温、高湿、静风等气象条件下,大气污染容易发生,而在强风、降水等气象条件下,大气污染不易发生。因此,大气污染浓度序列包含了气象条件和污染源信息。
3.在我国大气污染治理中,评估“天帮忙”和“人努力”的所占比例,即定量气象条件和减排措施对污染浓度变化的具体贡献,具有重要的科学和现实意义。
4.目前在评估人为排放和气象条件对大气污染浓度变化的贡献上,基本都是使用第三代空气质量模型(如wrf-chem、wrf-cmaq、naqpms等),模拟不同气象场或不同排放情景下污染物浓度变化情况,进而量化人为排放和气象条件贡献。然而,此方法过程较为复杂、运算速度较慢、操作要求高,因此难以广泛推广使用,基于此,研究一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统和方法是必要的。
技术实现要素:
5.针对现有设备存在的缺陷和问题,本发明提供一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统和方法,有效的解决了现在评估人为排放和气象条件对大气污染浓度变化贡献的方法过程较为复杂、运算速度较慢、操作要求高,难以广泛推广使用的问题。
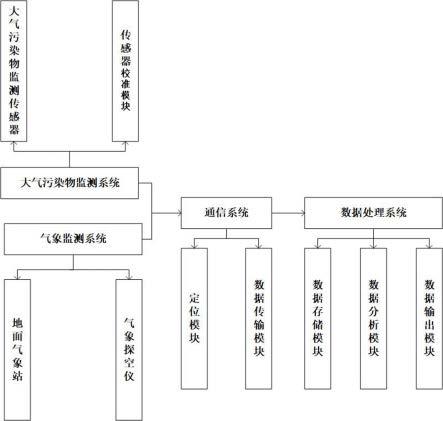
6.本发明解决其技术问题所采用的方案是:一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统,包括大气污染物监测系统、气象监测系统、通信系统和数据处理系统,大气污染物监测系统和气象监测系统监测到的数据通过通信系统传输至数据处理系统,所述大气污染物监测系统包括大气污染物监测传感器和传感器校准模块,大气污染物监测传感器用于监测大气内污染物的浓度,传感器校准模块用于对大气污染物监测传感器进行校准;所述气象监测系统包括地面气象站和气象探空仪,地面气象站用于采集地面上的气象数据,气象探空仪用以采集处于高空中的气象数据;所述通信系统包括定位模块和数据传输模块,定位模块用于获取各个监测设备的位置信息,数据传输模块用来把各个监测设备采集到的数据信息传输至数据处理系统;所述数据处理系统包括数据存储模块、数据分析模块和数据输出模块,数据存储模块用于存储采集的大气污染物浓度数据和气象数据,数据存储模块用于存储采集的大气污染物浓度数据和气象数据,数据分析模块利用程序算法处理气象数据和污染物数据,重建污染物浓度时间序列,剥离气象条件和人为排放对污染物变化的贡献,数据输出模块将数据分析模块处理后的结果输出。
7.进一步的,所述大气污染物监测传感器监测pm
2.5
、o3、so2、no
x
和vocs中的至少一种污染物,传感器采用电池或太阳能供电,且传感器能够在-50℃~85℃的温度中正常工作。
8.进一步的,所述传感器校准模块采用标准气体或标准仪器对大气污染物监测传感器校准。
9.进一步的,所述地面气象站为可移动式,用于监测地面上风速、风向、温度、相对湿度、日照时长和降雨量及其他相关气象参数,气象探空仪用于测量高空中气压、湿度和温度的垂直廓线,地面气象站和气象探空仪的测定频率为2~3次/天。
10.进一步的,所述定位模块基于北斗卫星导航系统或gps系统对监测设备的经纬度进行定位,数据传输模块采用5g或无线网络进行数据传输。
11.进一步的,所述数据存储模块容量大于10 tb,数据分析模块包括计算机硬件和软件,计算机硬件为linux操作系统、运行内存大于64 gb、cpu核心大于32个、raid5冗余磁盘阵列,软件包括天气预报模式wrf、r语言。
12.进一步的,所述数据分析模块采用的程序算法为kolmogorov-zurbenko滤波法,程序算法流程包括以下步骤:1)使用kolmogorov-zurbenko滤波法将污染物时间序列和气象时间序列分解为长期分量、季节分量和短期分量;kolmogorov-zurbenko滤波法是经p次迭代与m点滑动平均的低通滤波器,其计算如公式1,公式1:式中,yi为经过一次滤波后的时间序列,i为滤波时的采样点,j为滑动窗口变量表示参与滑动的各时间点,k为对xi进行滤波时其两端的滑动窗口长度,m为滑动窗口长度(m=2k 1),x为原始序列,原始时间序列x滤波后的结果作为下次的滤波输入再次进行计算,以此迭代计算p次,最终得到滤波结果kz
(m, p)
(x);不同尺度过程的滤波可由参数m与p控制;短期分量的计算方法为:,季节分量的计算方式为:,长期分量的计算方式为:;长期分量和季节分量之和为基线分量;式中,为污染物原始序列,为污染物原始序列经过kz
(15,5)
处理后的序列,为污染物原始序列经过kz
(365,3)
处理后的序列;2)分别以污染物浓度序列的短期分量和基线分量为因变量,以气象要素为自变量,建立多元线性回归模型,回归模型如公式2和公式3,公式2:公式3:式中:和分别为污染物短期分量和基线分量与气象要素的回归模型,和分别为短期分量和基线分量回归残差,为短期分量回归的第i个气象因
子,为基线分量回归的第j个气象因子,a0、ai、b0、bj为回归系数;3)污染物浓度时间序列回归的总残差是和之和,即,公式4:利用kz
m=365,p=3
对总残差进行再次滤波,滤波结果表示仅由污染源排放改变引起的污染物长期变化趋势,进而定量人为排放和气象条件对大气污染物浓度贡献。
13.一种用于定量人为排放和气象条件对大气污染物浓度贡献的方法,主要包括以下步骤:s1:将大气污染物监测系统和气象监测系统布置于待评估区域,并启动预热,通过传感器校准模块采用标准气体或标准仪器对大气污染物监测传感器校准,采用标准气象监测仪对地面气象站和气象探空仪校准;s2:校准完毕后大气污染物监测系统和气象监测系统开始工作,分别获取大气污染物浓度数据和气象数据;s3:通信系统将采集的大气污染物浓度数据和气象数据用5g或无线传输的方式汇集到数据处理系统储存;s4:数据分析系统对待评估区域的气象场进行高精度的模拟,并与s2中获取的实际地面和高空气象资料进行比对,若比对效果不理想,调整wrf模型的参数化方案,直到模拟结果理想;s5:判断wrf模型输出的气象数据与采集的污染物浓度数据间的相关性,选择具有相关性的气象数据;s6:利用kolmogorov-zurbenko滤波法将气象数据和污染物序列分解为短期分量、季节分量和长期分量,采用逐步回归方法建立污染物基线分量和短期分量与相应尺度气象要素的线性回归模型,通过对残差进行滤波和序列重建;s7:使用重建后的序列定量人为排放和气象条件对大气污染物浓度的贡献,由数据输出模块将结果输出。
14.本发明的有益效果:本发明主要用于评估人为排放和气象条件对大气污染浓度变化的贡献中,提供一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统,可直接用观测数据定量大气污染治理中“天帮忙”和“人努力”的贡献,克服了传统方法运算复杂、操作难度高等缺点;系统含有气象传感器和气象模拟模块,气象传感器的实测数据为气象模型提供了检校,气象模型的输出数据弥补了实测数据站点有限、参数较少、高空数据获取难等不足;系统采用5g或无线网络通信,可移动性强、可在任意区域布设;系统可自动化运行、操作简便、省时省力。
附图说明
15.图1为一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统图;图2为一种用于定量人为排放和气象条件对大气污染物浓度贡献的方法流程图;
图3为一种用于定量人为排放和气象条件对大气污染物浓度贡献的算法流程图。
具体实施方式
16.下面结合附图和实施例对本发明进一步说明。
17.实施例1:本实施例旨在提供一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统和方法,以便解决目前现有评估人为排放和气象条件对大气污染浓度变化贡献的方法过程较为复杂、运算速度较慢、操作要求高,难以广泛推广使用的问题。
18.如图1中所示,本实施例提供了一种用于定量人为排放和气象条件对大气污染物浓度贡献的系统,包括大气污染物监测系统、气象监测系统、通信系统和数据处理系统,大气污染物监测系统和气象监测系统监测到的数据通过通信系统传输至数据处理系统;大气污染物监测系统包括大气污染物监测传感器和传感器校准模块,大气污染物监测传感器用于监测大气污染物的浓度,例如pm
2.5
、o3、so2、no
x
和vocs,采用电池或太阳能供电,且其能够在-50℃~85℃的温度中正常工作,保障设备在多种环境下都能进行工作,传感器校准模块采用标准气体或标准仪器对大气污染物监测传感器校准,保障设备监测数据更加精准,气象监测系统包括地面气象站和气象探空仪,地面气象站为可移动式,用于监测接近地面的气象参数,如风速、风向、温度、相对湿度、日照时长和降雨量,气象探空仪可监测高空中的气象参数,如气压、湿度和温度的垂直廓线,地面气象站和气象探空仪的测定频率为2~3次/天;通信系统包括定位模块和数据传输模块,定位模块用于获取各个监测设备的位置信息,采用北斗卫星导航系统或gps系统,从而提高定位模块获取信息的效率,数据传输模块用来把采集到的数据传输至数据处理系统,使用5g或无线网络进行数据传输,提高数据传输效率,数据处理系统包括数据存储模块、数据分析模块和数据输出模块,数据存储模块用于存储采集到的数据,数据存储模块容量大于10 tb,数据分析模块用于对采集的数据进行程序算法处理,数据分析模块包括计算机硬件和软件,计算机硬件为linux操作系统、运行内存大于64 gb、cpu核心大于32个、raid5冗余磁盘阵列,软件包括天气预报模式wrf、r语言,数据存储模块用于存储采集的大气污染物浓度数据和气象数据,数据分析模块利用程序算法处理气象数据和污染物数据,重建污染物浓度时间序列,剥离气象条件和人为排放对污染物变化的贡献,数据输出模块将数据分析模块处理后的结果输出。
19.本实施例中,可直接用观测数据定量大气污染治理中“天帮忙”和“人努力”的贡献,克服了传统方法运算复杂、操作难度高等缺点;系统含有气象传感器和气象模拟模块,气象传感器的实测数据为气象模型提供了检校,气象模型的输出数据弥补了实测数据站点有限、参数较少、高空数据获取难等不足;系统采用5g或无线网络通信,可移动性强、可在任意区域布设;系统可自动化运行、操作简便、省时省力。
20.实施例2本实施例提供一种用于定量人为排放和气象条件对大气污染物浓度贡献的方法,工作流程如图2所示,包括以下步骤:s1:将大气污染物监测系统和气象监测系统布置于待评估区域,并启动预热,通过传感器校准模块采用标准气体或标准仪器对大气污染物监测传感器校准,采用标准气象监测仪对地面气象站和气象探空仪校准;
s2:校准完毕后大气污染物监测系统和气象监测系统开始工作,分别获取大气污染物浓度数据和气象数据;s3:通信系统将采集的大气污染物浓度数据和气象数据用5g或无线传输的方式汇集到数据处理系统储存;s4:数据分析系统对待评估区域的气象场进行高精度的模拟,并与s2中获取的实际地面和高空气象资料进行比对,若比对效果不理想,调整wrf模型的参数化方案,直到模拟结果理想;s5:判断wrf模型输出的气象数据与采集的污染物浓度数据间的相关性,选择具有相关性的气象数据;s6:利用kolmogorov-zurbenko滤波法将气象数据和污染物序列分解为短期分量、季节分量和长期分量,采用逐步回归方法建立污染物基线分量和短期分量与相应尺度气象要素的线性回归模型,通过对残差进行滤波和序列重建;s7:使用重建后的序列定量人为排放和气象条件对大气污染物浓度的贡献,由数据输出模块将结果输出。
21.其中,s6中的程序算法流程如图3所示,包括以下步骤:1)使用kolmogorov-zurbenko滤波法将污染物时间序列和气象时间序列分解为长期分量、季节分量和短期分量;kolmogorov-zurbenko滤波法是经p次迭代与m点滑动平均的低通滤波器,其计算如公式1,公式1:式中,yi为经过一次滤波后的时间序列, i为滤波时的采样点,j为滑动窗口变量表示参与滑动的各时间点,k为对xi进行滤波时其两端的滑动窗口长度,m为滑动窗口长度(m=2k 1),x为原始序列,原始时间序列x滤波后的结果作为下次的滤波输入再次进行计算,以此迭代计算p次,最终得到滤波结果kz
(m, p)
(x);不同尺度过程的滤波可由参数m与p控制;短期分量的计算方法为:,季节分量的计算方式为:,长期分量的计算方式为:。长期分量和季节分量之和为基线分量;式中,为污染物原始序列,为污染物原始序列经过kz
(15,5)
处理后的序列,为污染物原始序列经过kz
(365,3)
处理后的序列;2)分别以污染物浓度序列的短期分量和基线分量为因变量,以气象要素为自变量,建立多元线性回归模型,回归模型如公式2和公式3,公式2:公式3:式中:和分别为污染物短期分量和基线分量与气象要素的回归模型,
和分别为短期分量和基线分量回归残差,为短期分量回归的第i个气象因子,为基线分量回归的第j个气象因子,a0、ai、b0、bj为回归系数;3)污染物浓度时间序列回归的总残差是和之和,即,公式4:利用kz
m=365,p=3
对总残差进行再次滤波,滤波结果表示仅由污染源排放改变引起的污染物长期变化趋势,进而定量人为排放和气象条件对大气污染物浓度贡献。
22.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分的方法。
23.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。