针对传感器故障的2-dof直升机系统的主动容错控制方法
技术领域
1.本发明涉及主动容错控制方法领域,具体为一种针对传感器故障的2-dof直升机系统的主动容错控制方法。
背景技术:
2.无人直升机相对于其它无人机例如四旋翼无人机来说,具有可在小范围内垂直起飞或悬停的等特点。因此受到了越来越多研究人员的关注,并且其在农业灌溉,地形检测等场景都实现了应用。但是无人直升机具有高度非线性、交叉耦合的特点。这增加了控制直升机稳定飞行的难度。此外,在飞行过程中可能会因为传感器发生故障而偏离预期轨迹甚至坠毁。
3.为了能让直升机能够稳定安全的工作,研究人员提出了许多控制方法,有的使用被动的容错方法来缓解因传感器发生故障而带来的影响,但是,这种情况只适用于传感器发生较轻故障的情况,而面对发生较为严重的故障却显得乏力。有的使用主动容错方法来检测传感器的故障,但是其只针对了传感器发生固定值偏置的情况,而没用考虑到传感器可能发生其它类型的故障。上述的方法都只考虑了某种特定类型的传感器故障的发生,应用面不够广泛,为此我们提出了针对传感器故障的2-dof直升机系统的主动容错控制方法。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供一种针对传感器故障的2-dof直升机系统的主动容错控制方法,以解决上述的问题。
6.(二)技术方案
7.为实现上述所述目的,本发明提供如下技术方案:
8.一种针对传感器故障的2-dof直升机系统的主动容错控制方法,包括以下步骤:
9.第一步:将直升机系统模型简化为:
[0010][0011][0012]
传感器会发生故障,系统描述为:
[0013][0014][0015]
y=[y1;y2];
[0016]
第二步:计非线性观测器来估计传感器故障值;
[0017]
第三步:证明观测器的稳定性;
[0018]
第四步:设计基于非线性观测器的区间二型模糊滑模控制的主动容错控制器。
[0019]
优选的,所述第一步中的直升机系统模型简化x=[x1;x2],
分别对应系统的状态变量,角度和角速度,u=[v
p
,vy]
t
表示系统的控制输入,a(x)和b(x)是系统的增益矩阵。
[0020]
优选的,所述第一步中的系统y1=x1,y2=x2 f表示系统的输出,f=[f
s1
;f
s2
]表示传感器的故障输入,且满足
[0021]
优选的,所述第二步中的非线性观测器为:
[0022][0023][0024][0025][0026]
其中,k=diag[k1,k2],l=diag[l1,l2],γ=diag[τ1,τ2]为观测器的增益系数,函数tah(z)=[tanhz(1),tanhz(2)]
t
,表示系统的输出,表示观测器估计到的故障输入。
[0027]
优选的,所述第三步证明观测器的稳定性包括以下内容:
[0028]
选取李雅普诺夫函数;
[0029][0030]
对v1求导,并将假设数据代入可得到:
[0031][0032]
≤0。
[0033]
优选的,第四步中的主动容错控制器包括以下内容:
[0034]
定义e=x
d-y1为系统角度的跟踪误差,表示系统的预期轨迹,那么误差的导数或者
[0035]
选取李雅普诺夫函数;
[0036]
对v2求导;
[0037][0038]
通过选取虚拟控制器保证成立,其中c=diag[c1,c2],且c1》0,c2》0;
[0039]
设计滑模面:
[0040]
可得到;
[0041][0042]
选取李雅普诺夫函数
[0043][0044]
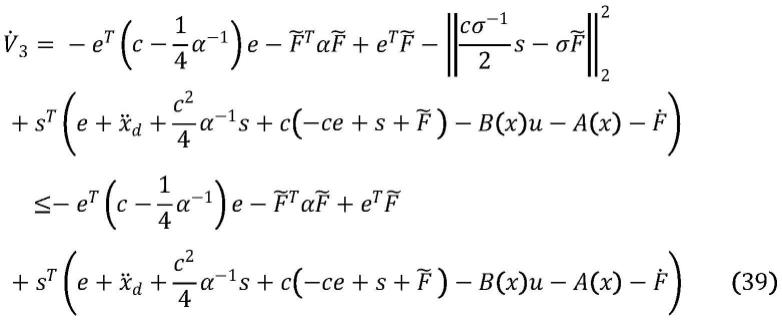
对v3求导,
[0045][0046]
根据基本不等式可以得到:
[0047][0048]
设计系统控制器;
[0049][0050]
其中其中是对从观测器的估计值求导而得到的,且满足n》0为控制器增益系数,ur为区间二型模糊逻辑控制器的输出,设计的输入和输出的隶属度函数图像和模糊规则;
[0051]
得到
[0052]
通过输入输出的隶属函数图像和模糊规则表,得知设计的输入和输出的绝对值在0~1之间,因此s
t
ur≤-|s|,只要保证n-w》0,进而可得到
[0053]
(三)有益效果
[0054]
与现有技术相比,本发明提供的针对传感器故障的2-dof直升机系统的主动容错控制方法,具备以下有益效果:
[0055]
1、该针对传感器故障的2-dof直升机系统的主动容错控制方法,考虑存在传感器故障的2-dof直升机系统的跟踪控制,为了避免因传感器发生故障而偏离预期轨迹,设计一个非线性滑模观测器去估计传感器的故障值,所设计的观测器可适用于传感器发生不同类型的故障情况。根据估计的结果,设计了基于滑模控制方法的主动容错控制器,此外,为减缓抖振带来的不利影响,引入区间二型模糊逻辑控制策略。
[0056]
2、该针对传感器故障的2-dof直升机系统的主动容错控制方法,考虑了实际的2-dof直升机系统中的传感器发生故障的可能性,可以将其应用到实际的直升机系统中,具有较好的实用价值。
附图说明
[0057]
图1为本发明实施例2-dof直升机的模型示意图;
[0058]
图2为本发明实施例区间二型模糊逻辑控制方法的输入隶属函数示意图;
[0059]
图3为本发明实施例区间二型模糊逻辑控制方法的输出隶属函数示意图;
[0060]
图4为本发明实施例模糊规则示意图;
[0061]
图5为本发明实施例针对存在传感器故障的2-dof直升机系统的主动容错控制策
略结构图;
[0062]
图6为本发明实施例在发生传感器故障情况下的2-dof直升机俯仰角的角度和期望角度的轨迹图;
[0063]
图7为本发明实施例在发生传感器故障情况下的2-dof直升机偏航角的角度和期望角度的轨迹图;
[0064]
图8为本发明实施例观测器所估计到俯仰角传感器故障值和所设计的故障值示意图;
[0065]
图9为本发明实施例观测器所估计到偏航角传感器故障值和所设计的故障值示意图;
[0066]
图10为本发明实施例2-dof直升机系统的控制输入示意图。
具体实施方式
[0067]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0068]
实施例
[0069]
请参阅图1-10,本实施例提供的针对传感器故障的2-dof直升机系统的主动容错控制方法,包括以下步骤:
[0070]
步骤1:图1表示2-dof直升机的模型示意图,其中,pitch表示俯仰轴,yaw表示偏航轴,mg表示重力,l
cm
表示从重心到坐标原点的距离,f
p
和fy分别表示俯仰轴和偏航轴转子产生的推力,r
p
和ry分别表示俯仰和偏航轴转子距离固定坐标原点的距离。
[0071]
(a)根据拉格朗日力学,系统的非线性动力学方程如下:
[0072][0073][0074]
其中:
[0075][0076][0077][0078][0079]
m是机身质量,g是重力常数,v
p
表示俯仰轴转子的输入电压,j
p
是俯仰轴的总惯性矩,d
p
是俯仰轴的阻尼,k
pp
是俯仰轴转子的扭矩推力增益,k
py
偏航轴转子作用在俯仰轴上的横向扭矩推力增益。偏航轴的总惯性矩和阻尼分别为jy和dy,vy表示偏航轴转子的输入电压,k
yy
是偏航轴的扭矩推力增益,k
yp
是俯仰轴转子作用在偏航轴上的横向扭矩推力增益。
[0080]
可将2-dof直升机系统模型简化为:
[0081]
[0082][0083]
其中,x=[x1;x2],分别对应系统的状态变量,角度和角速度,u=[v
p
,vy]
t
表示系统的控制输入,a(x)和b(x)是系统的增益矩阵,分别为:
[0084][0085][0086]
(b)在实际应用中,传感器可能会发生故障。因此系统可描述为:
[0087][0088][0089]
y=[y1;y2]
ꢀꢀ
(13)
[0090]
其中,y1=x1,y2=x2 f表示系统的输出,f=[f
s1
;f
s2
]表示传感器的故障输入,且满足
[0091]
步骤2:设计非线性观测器来估计传感器故障值。
[0092]
所设计的非线性观测器为:
[0093][0094][0095][0096][0097]
其中,k=diag[k1,k2],l=diag[l1,l2],γ=diag[τ1,τ2]为观测器的增益系数,函数tah(z)=[tanhz(1),tanhz(2)]
t
,表示系统的输出,表示观测器估计到的故障输入。
[0098]
步骤3:证明观测器的稳定性。
[0099]
存在以下假设:
[0100]
假设1:存在一个矩阵r满足
[0101][0102]
假设2:函数φ(x1,x2,u)满足lipschitz条件,即存在两个正常数l
g1
,l
g2
,使得
[0103]
|φ(x1,x2,u)-φ(x3,x4,u)|=l
g1
|x
1-x3| l
g2
|x
2-x4|
ꢀꢀ
(19)
[0104]
假设3:存在正定对称矩阵p1,p2和p3满足
[0105]
2p1k-p
1-l
g1
i2×2》0
ꢀꢀ
(20)
[0106]
2p2l-p
1-l
g1
i2×
2-l
g2
i2×2》0
ꢀꢀ
(21)
[0107]
p3γ=r2lp2ꢀꢀ
(22)
[0108]
假设4:对于误差项满足
[0109][0110]
其中,a为正定对角矩阵。
[0111]
假设5:存在一个对角矩阵m,满足
[0112][0113]
p3(γa-m)《α
ꢀꢀ
(25)
[0114]
其中,α是一个很小的正常数。
[0115]
定义表示实际值与观测值的误差,则误差动态系统为:
[0116][0117][0118][0119]
其中,
[0120]
选取李雅普诺夫函数
[0121][0122]
对v1求导,并将假设1~5代入可得到
[0123][0124]
这表明了观测器是稳定的,因此该观测器能够有效估计系统变量和传感器的故障值。
[0125]
步骤4:设计基于非线性观测器的区间二型模糊滑模控制的主动容错控制器。
[0126]
定义e=x
d-y1为系统角度的跟踪误差,表示系统的预期轨迹,那么误差的导数该式子又可描述为:
[0127][0128]
选取李雅普诺夫函数
[0129][0130]
对v2求导,
[0131][0132]
通过选取虚拟控制器保证成立。其中c=diag[c1,c2],且c1》0,c2》0。
[0133]
设计滑模面
[0134][0135]
从公式(35)中可得到
[0136]
[0137][0138]
选取李雅普诺夫函数
[0139][0140]
对v3求导,
[0141][0142]
根据基本不等式可以得到,
[0143][0144]
设计系统控制器
[0145][0146]
其中其中是对从观测器的估计值求导而得到的,且满足n》0为控制器增益系数,ur为区间二型模糊逻辑控制器的输出,设计的输入和输出的隶属度函数图像和模糊规则如图2,图3和图4所示。
[0147]
将其代入到公式(39)当中,可得到
[0148][0149]
通过输入输出的隶属函数图像和模糊规则表,我们可以知道所设计的输入和输出的绝对值在0~1之间,因此s
t
ur≤-|s|,只要保证n-w》0,进而可得到
[0150][0151]
这表明所设计的控制器是有效的。
[0152]
本发明公开的上述针对具有传感器故障的2-dof直升机系统的主动容错控制,可实现对预期轨迹的跟踪,避免系统因传感器发生故障的而受到影响。首先,设计了一个非线性滑模观测器,用来估计传感器的故障值,通过李亚普诺夫函数证明所设计观测器的稳定性。其次,根据观测器估计的结果,设计了一个基于滑模控制的主动容错控制器,使用区间二型模糊逻辑控制方法来抑制系统输入的抖振,接着,证明了所设计的控制器的有效性。最后,在matlab仿真软件上进一步证明了该控制策略的有效性和合理性。
[0153]
本发明提供的针对传感器故障的2-dof直升机系统的主动容错控制方法,重点是
考虑实际的2-dof直升机系统中的传感器发生故障的可能性,可以将其应用到实际的直升机系统中,具有较好的实用价值。
[0154]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。