1.本发明属于电动桌领域,特别涉及一种桌面自调节控制方法、控制系统及智能电动桌。
背景技术:
2.目前电动桌的桌面高度调节,都是通过手动按键、无线遥控,或者语音控制等由使用者直接控制调整。但是这种调节,是按照使用者的主观意愿来进行的,不一定符合人体工学健康要求的高度。
3.另外,在针对不同学习状态时,均需要手动调节。智能化水平较低,操作复杂,体验感差。
技术实现要素:
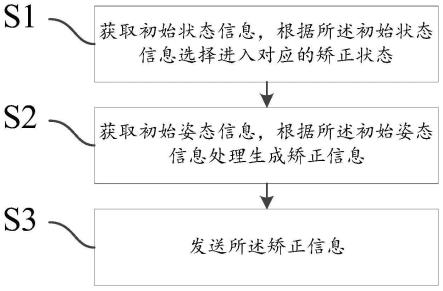
4.针对上述问题,本发明提供了一种桌面自调节控制方法,所述控制方法包括:
5.获取初始状态信息,根据所述初始状态信息选择进入对应的矫正状态;
6.获取初始姿态信息,根据所述初始姿态信息处理生成矫正信息;
7.发送所述矫正信息。
8.进一步的,所述初始状态信息包括图像信息和桌面状态信息;
9.所述图像信息是指电动桌正前方的即时图像;
10.所述桌面状态信息包括桌面画板的状态,桌面画板的状态分为画板关闭状态和画板启用状态。
11.进一步的,所述矫正状态包括普通坐姿矫正状态、绘画坐姿矫正状态、普通站姿矫正状态和绘画站姿矫正状态。
12.进一步的,所述控制方法还包括:
13.在获取所述初始姿态信息前,识别处理初始状态信息;
14.若初始状态信息表示姿态不正常,则生成并发送提示信息。
15.进一步的,所述生成矫正信息包括:
16.根据初始姿态信息,计算得到人眼与目标物间的实际距离;
17.将实际距离与预设距离对比处理,得到矫正类型。
18.进一步的,所述生成矫正信息还包括:
19.获取矫正类型,根据矫正类型调用矫正参数计算公式;
20.获取并根据初始姿态信息,通过矫正参数计算公式,计算得到矫正参数。
21.进一步的,所述生成矫正信息还包括:
22.根据矫正类型,生成矫正参数;
23.若矫正类型为空,矫正参数为0;
24.若矫正类型为上升或下降,矫正参数为预设矫正值。
25.进一步的,所述控制方法还包括:
26.定时获取即时姿态信息,识别处理即时姿态信息;
27.若即时姿态信息表示姿态不正常,则生成并发送提示信息。
28.在上述一种桌面自调节控制方法的基础上,本发明还提供了一种桌面自调节控制系统,所述控制系统包括:
29.获取模块,用于获取初始状态信息和初始姿态信息;将初始状态信息发送至判断模块;将初始姿态信息发送至处理模块;
30.判断模块,用于获取并根据所述初始状态信息,生成进入矫正状态的指令,将所述进入矫正状态的指令发送至处理模块;
31.处理模块,用于获取并执行所述进入矫正状态的指令;获取并根据所述初始姿态信息,处理生成矫正信息;将矫正信息发送至发送模块;
32.发送模块,用于发送所述矫正信息。
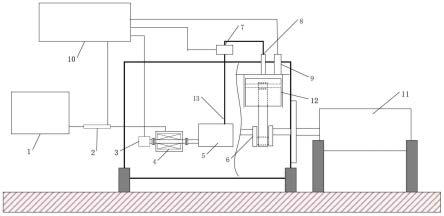
33.在上述一种桌面自调节控制方法及控制系统的基础上,本发明还提供了一种智能电动桌,所述智能电动桌包括电动桌本体、上述控制系统、ai摄像头和提示终端;所述ai摄像头、控制系统和提示终端均安装在电动桌本体上,且所述ai摄像头和提示终端均与控制系统信号连接;
34.所述电动桌本体包括:
35.桌面,所述桌面与驱动装置传动连接,可实现升降;
36.驱动装置,与所述桌面传动连接,与所述控制系统信号连接;
37.画板,安装在所述桌面上,可翻转打开或闭合收纳在桌面内。
38.本发明的有益效果是:通过在电动桌上设置ai摄像头、控制系统和提示终端,并实施本发明提出的控制方法,使电动桌实现智能调节功能。提高电动桌的智能健康监测功能,可以防止近视,防止脊柱弯曲。并且本发明提出的智能电动桌满足不同的使用场景,无需手动调节,体验感极佳。
39.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
附图说明
40.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
41.图1示出了本发明实施例的桌面自调节控制方法的流程示意图;
42.图2示出了本发明实施例的矫正类型为上升时的场景示意图;
43.图3示出了本发明实施例的矫正类型为下降时的场景示意图;
44.图4示出了本发明实施例的桌面自调节控制系统的结构示意图。
具体实施方式
45.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例
中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
46.本发明实施例提供了一种桌面自调节控制方法,如图1所示,所述控制方法包括:
47.s1.获取初始状态信息,根据所述初始状态信息选择进入对应的矫正状态;
48.s2.获取初始姿态信息,根据所述初始姿态信息处理生成矫正信息;
49.s3.发送所述矫正信息。
50.上述桌面自调节控制方法,能够实现电动桌的智能健康监测功能,可以防止近视,防止脊柱弯曲。
51.具体的,所述初始状态信息包括但不限于图像信息和桌面状态信息。
52.所述图像信息是指电动桌正前方的即时图像,可通过ai摄像头拍摄获取。
53.所述桌面状态信息包括桌面画板的状态,桌面画板的状态分为画板关闭状态和画板启用状态,可通过压力传感器获取。
54.所述矫正状态包括但不限于普通坐姿矫正状态、绘画坐姿矫正状态、普通站姿矫正状态和绘画站姿矫正状态。
55.示例性的,电动桌开机后,若桌面状态信息为画板关闭状态,并且识别到首次获取的图像信息内有坐姿人像时,进入普通坐姿矫正状态。若桌面状态信息为画板启用状态,并且识别到首次获取的图像信息内有坐姿人像时,进入绘画坐姿矫正状态。电动桌开机后,若桌面状态信息为画板关闭状态,并且识别到首次获取的图像信息内有站姿人像时,进入普通站姿矫正状态。若桌面状态信息为画板启用状态,并且识别到首次获取的图像信息内有站姿人像时,进入绘画站姿矫正状态。
56.针对不同使用场景,设置不同矫正标准,确保使用者在不同使用场景下,都能保持健康姿态。
57.优先的,所述控制方法还包括:
58.s101.在获取初始姿态信息前,识别处理初始状态信息;
59.s1011.若初始状态信息表示姿态正常,则执行步骤s2;
60.s1012.若初始状态信息表示姿态不正常,则生成并发送提示信息,定时返回执行步骤s1。
61.示例性的,获取图像信息,识别分析图像信息内的人像姿态特征。例如,若当前使用者坐姿规范,且正对桌面,则表示坐姿正常。若当前使用者坐姿不规范,或者没有正对桌面,则表示坐姿不正常;发出提示信息,通过喇叭或者显示屏提示使用者调整坐姿;在发出提示信息,经过预定时间后,重新获取图像信息。确保桌面自动调节时,使用者坐姿或站姿正常,确保桌面高度自调节效果。
62.需要说明的是,识别分析图像信息内的人像姿态特征属于公知技术,此处不再赘述。
63.具体的,所述初始姿态信息包括但不限于人眼高度、桌面高度、目标物高度、人眼与ai摄像头间的距离、目标物与ai摄像头间的距离、人眼和目标物到ai摄像头处的视线夹角。
64.所述目标物包括但不限于书本、画板。
65.示例性的,所述初始姿态信息可通过ai摄像头获取。例如,所述ai摄像头基于firefly-rk3399开源主板与高清摄像头实现,所述ai摄像头采用但不限于单目测距、双目测距或结构光测距算法中的一种测距算法。
66.如图2和图3所示,将ai摄像头置放在书桌适当位置,ai摄像头拍摄方向为电动桌正前方。进入初始矫正状态时,ai摄像头扫描并识别出人眼、人体姿态及桌面上的书本。ai摄像头可以计算出人眼与ai摄像头间的距离,记为第一距离d1;书本与ai摄像头间的距离,记为第二距离d2;人眼和书本到ai摄像头处视线夹角,记为第一夹角α1。
67.所述桌面高度为桌面距离地面的高度,可由激光测距仪获取。书本高度为书本距离地面的高度,可设置为与桌面高度相同。画板打开后,与桌面高度差为固定值,可预先设定。
68.具体的,所述矫正信息包括但不限于矫正类型和矫正参数。
69.进一步的,所述生成矫正信息包括:
70.s201.根据初始姿态信息,计算得到人眼与目标物间的实际距离;
71.s202.将实际距离与预设距离对比处理,得到矫正类型。
72.所述预设距离包括:
73.第一预设距离,表示在普通坐姿矫正状态下,人眼距离书本的最佳距离;
74.第二预设距离,表示在绘画坐姿矫正状态下,人眼距离画板的最佳距离;
75.第三预设距离,表示在普通站姿矫正状态下,人眼距离书本的最佳距离;
76.第四预设距离,表示在绘画站姿矫正状态下,人眼距离画板的最佳距离。
77.需要说明的是,在普通坐姿矫正状态和普通站姿矫正状态下,所述目标物为桌面上的书本;在绘画坐姿矫正状态和绘画站姿矫正状态下,所述目标物为画板。
78.示例性的,以普通坐姿矫正状态为例进行说明。根据人眼与ai摄像头间的距离,记为第一距离d1;书本与ai摄像头间的距离,记为第二距离d2;人眼和书本在ai摄像头处视线夹角,记为第一夹角α1;基于三角函数公式可以计算出人眼与书本间的距离,记为实际距离ds。
79.设定在普通坐姿矫正状态下,人眼距离书本的最佳距离为第一预设距离y1。
80.若实际距离ds等于第一预设距离y1,则矫正类型为“空”,表示实际距离ds为最佳距离,无需调整;
81.若实际距离ds大于第一预设距离y1,则矫正类型为“上升”,表示实际距离ds大于最佳距离,需要上升桌面高度;
82.若实际距离ds小于第一预设距离y1,则矫正类型为“下降”,表示实际距离ds小于最佳距离,需要下降桌面高度。
83.进一步的,所述生成矫正信息还包括:
84.s2021.获取矫正类型,根据矫正类型调用矫正参数计算公式;
85.s2022.获取并根据初始姿态信息,通过矫正参数计算公式,计算得到矫正参数。
86.具体的,所述矫正参数计算公式包括但不限于三角函数公式。
87.示例性的,在普通坐姿矫正状态下,实际距离ds为人眼与书本间的实际距离,第一预设距离y1为人眼与书本间的最佳距离。
88.若实际距离ds等于第一预设距离y1,则表示当前坐姿和桌面高度为最佳适配状态,
生成矫正信息为“矫正类型为空,矫正参数为0”。此时电动桌完成矫正。
89.若实际距离ds大于第一预设距离y1,第一矫正参数的计算方法可采用但不限于以下方法:
90.如图2所示,根据第一距离d1、第二距离d2和实际距离ds,基于三角函数公式,可计算得到人眼和ai摄像头到书本处的视线夹角,记为第二夹角α2;
91.通过ai摄像头可获取ai摄像头到书本处与垂直面的夹角,记为第三夹角α3;
92.通过第二夹角α2和第三夹角α3,可计算出人眼到书本处与垂直面的夹角,记为第四夹角α4;
93.根据实际距离ds、第一预设距离y1和第四夹角α4(锐角),基于三角函数公式,可以计算得到第一矫正参数j1;
94.生成矫正信息为“矫正类型为上升,矫正参数为第一矫正参数j
1”。此时,电动桌控制桌面上升第一矫正参数j1高度后,完成矫正。
95.若实际距离ds小于第一预设距离y1,第二矫正参数的计算方法可采用但不限于以下方法:
96.如图3所示,根据第一距离d1、第二距离d2和实际距离ds,基于三角函数可计算得到人眼和ai摄像头到书本处的视线夹角,记为第二夹角α2;
97.通过ai摄像头可获取ai摄像头到书本处与垂直面的夹角,记为第五夹角α5;
98.通过第二夹角α2和第五夹角α5,可计算得到人眼到书本处与垂直面的夹角,记为第四夹角α4;
99.根据实际距离ds、第一预设距离y1和第四夹角α4(钝角),基于三角函数公式,可以计算得到第二矫正参数j2;
100.生成矫正信息为“矫正类型为下降,矫正参数为第二矫正参数j
2”。此时,电动桌控制桌面下降第二矫正参数j2高度后,完成矫正。
101.需要说明的是,其它矫正状态下矫正指令的生成方法,可以与在普通坐姿矫正状态下矫正指令的生成方法相同。此处不再赘述。
102.优选的,所述生成矫正信息还包括:
103.s203.根据矫正类型,生成矫正参数;
104.s2031.若矫正类型为空,矫正参数为0;
105.若矫正类型为上升或下降,矫正参数为预设矫正值。
106.需要说明的是,所述预设距离还包括:
107.第一预设距离范围,表示在普通坐姿矫正状态下,人眼距离书本的最佳距离范围;
108.第二预设距离范围,表示在绘画坐姿矫正状态下,人眼距离画板的最佳距离范围;
109.第三预设距离范围,表示在普通站姿矫正状态下,人眼距离书本的最佳距离范围;
110.第四预设距离范围,表示在绘画站姿矫正状态下,人眼距离画板的最佳距离范围。
111.若将步骤s2021和步骤s2022替换为步骤s203,在步骤s202中,将实际距离与第一预设距离范围或第二预设距离范围对比。
112.具体的,所述预设矫正值小于第一预设距离范围/第一预设距离范围的范围差值。
113.示例性的,若实际距离ds等于第一预设距离y1,则矫正类型为“空”,表示实际距离ds为最佳距离,无需调整,生成的矫正信息为“矫正类型为空,矫正参数为0”。此时电动桌完
成矫正。
114.若实际距离ds大于第一预设距离y1,则矫正类型为“上升”,表示实际距离ds大于最佳距离,需要上升桌面高度,生成的矫正信息为“矫正类型为上升,矫正参数为预设矫正值”;
115.若实际距离ds小于第一预设距离y1,则矫正类型为“下降”,表示实际距离ds小于最佳距离,需要下降桌面高度,生成的矫正信息为“矫正类型为上升,矫正参数为预设矫正值”。
116.进一步的优选的,所述控制方法还包括:
117.s4.若矫正信息中的矫正类型为上升或下降,则定时返回执行步骤s1。
118.具体的,通过步骤s1-步骤s2031,实现了一次矫正信息的发出,进行一次矫正调整,无法确定经过一次矫正调整,能否使实际距离ds落入第一预设距离范围/第二预设距离范围内。通过步骤s4能够实现连续多次矫正,确保实际距离ds最终落入第一预设距离范围或第二预设距离范围内。
119.并且将步骤s202-步骤s2031替代步骤s2021-步骤s2022,无需再计算实际矫正参数。
120.优选的,所述控制方法还包括:
121.s5.定时获取即时姿态信息,识别处理即时姿态信息;
122.s501.若即时姿态信息表示坐姿不正常,则生成并发送提示信息。
123.具体的,所述即时姿态信息包括但不限于图像信息。
124.示例性的,每间隔一段时间后,获取一次图像信息;识别分析图像信息内的人像坐姿特征。例如,若当前使用者坐姿规范,且正对桌面,则表示坐姿正常;若当前使用者坐姿不规范,或者没有正对桌面,则表示坐姿不正常;发出提示信息,通过喇叭或者显示屏提示使用者调整坐姿。
125.通过自调节桌面高度和监测提示相配合的方式,强化了健康监测的效果。确保使用者始终保持健康姿态,防止近视,防止脊柱弯曲。
126.本发明实施例提供了一种桌面自调节控制系统,如图4所示,所述控制系统包括:
127.获取模块,用于获取初始状态信息和初始姿态信息;将初始状态信息发送至判断模块;将初始姿态信息发送至处理模块;
128.判断模块,用于获取并根据所述初始状态信息,生成进入矫正状态的指令,将所述进入矫正状态的指令发送至处理模块;
129.处理模块,用于获取并执行所述进入矫正状态的指令;获取并根据所述初始姿态信息,处理生成矫正信息;将矫正信息发送至发送模块;
130.发送模块,用于发送所述矫正信息。
131.所述控制系统采用上述桌面自调节控制方法,能够实现电动桌的智能健康监测功能,可以防止近视,防止脊柱弯曲。
132.具体的,所述初始状态信息包括但不限于图像信息和桌面状态信息。
133.所述图像信息是指电动桌前的即时图像。所述获取模块与ai摄像头信号连接,可通过ai摄像头获取所述图像信息。
134.所述桌面状态信息是指桌面画板的状态,分为画板关闭状态和画板启用状态。所
述获取模块与压力传感器信号连接,可通过压力传感器获取所述桌面状态信息。
135.所述进入矫正状态的指令包括但不限于进入普通坐姿矫正状态的指令、进入绘画坐姿矫正状态的指令、进入普通站姿矫正状态的指令和进入绘画站姿矫正状态的指令。
136.所述矫正信息包括但不限于矫正类型和矫正参数。
137.优选的,所述控制系统还包括:
138.提示模块,分别与获取模块、提示终端连接,用于在获取初始姿态信息前,获取并判断处理初始状态信息;若初始状态信息表示姿态正常,则向获取模块发送获取初始姿态信息的指令;若初始状态信息表示姿态不正常,则生成并发送提示信息至提示终端,并且定时向获取模块发送重新获取初始状态信息的指令。
139.示例性的,所述提示终端可以采用但不限于喇叭或显示屏。
140.具体的,所述处理模块包括:
141.第一处理单元,用于获取并根据初始姿态信息,计算得到人眼与目标物间的实际距离;将实际距离与预设距离对比处理,得到矫正类型;发送矫正类型至发送模块和第二处理单元。
142.第二处理单元,获取矫正类型,根据矫正类型调用矫正参数计算公式;获取并根据初始姿态信息,通过所述矫正参数计算公式,计算得到矫正参数;发送矫正参数至发送模块。
143.所述预设距离包括:
144.第一预设距离,表示在普通坐姿矫正状态下,人眼距离书本的最佳距离;
145.第二预设距离,表示在绘画坐姿矫正状态下,人眼距离画板的最佳距离;
146.第三预设距离,表示在普通站姿矫正状态下,人眼距离书本的最佳距离;
147.第四预设距离,表示在绘画站姿矫正状态下,人眼距离画板的最佳距离。
148.需要说明的是,在普通坐姿矫正状态和普通站姿矫正状态下,所述目标物为桌面上的书本;在绘画坐姿矫正状态和绘画站姿矫正状态下,所述目标物为画板。
149.示例性的,以普通坐姿矫正状态为例进行说明,设定在普通坐姿矫正状态下,人眼距离书本的最佳距离为第一预设距离y1。
150.第一处理单元根据人眼与ai摄像头间的距离,记为第一距离d1;书本与ai摄像头间的距离,记为第二距离d2;人眼和书本在ai摄像头处视线夹角,记为第一夹角α1。可以计算出人眼与书本间的距离,记为实际距离ds。
151.若实际距离ds等于第一预设距离y1,生成的矫正状态为“空”。第一处理单元将矫正状态发送至发送模块和第二处理单元。第二处理单元获取到的矫正状态为“空”时,生成矫正参数为“0”;并将矫正参数“0”发送至发送模块。所述发送模块接收到的矫正信息为“矫正类型为空,矫正参数为0”。
152.若实际距离ds大于第一预设距离y1,生成的矫正类型为“上升”。第一处理单元将矫正类型发送至发送模块和第二处理单元。第二处理单元获取到的矫正状态为“上升”时,计算得到第一矫正参数j1或预设矫正值。
153.第二处理单元将第一矫正参数j1或预设矫正值发送直发送模块。发送模块接收到的矫正信息为“矫正类型为上升,矫正参数为第一矫正参数j1或预设矫正值”。
154.若实际距离ds小于第一预设距离y1,生成的矫正类型为“下降”。第一处理单元将矫
正类型发送至发送模块和第二处理单元。第二处理单元接收到的矫正状态为“下降”时,计算得到第二矫正参数j2或预设矫正值。第二处理单元将第二矫正参数j2或预设矫正值发送直发送模块。发送模块接收到的矫正信息为“矫正类型为下降,矫正参数为第二矫正参数j2或预设矫正值”。
155.需要说明的是,矫正参数的具体计算方法已在上文中进行示例说明,此处不再赘述。
156.进一步优选的,所述处理模块还用于分析判断矫正信息中的矫正类型,若矫正信息中的矫正类型为上升或下降,则生成重复运行指令;将所述重复运行指令发送至获取模块和判断模块。
157.具体的,一次矫正信息的发出,进行一次矫正调整。无法确定经过一次矫正调整,能否使实际距离ds落入第一预设距离范围或第二预设距离范围内。通过处理模块判断矫正信息中的矫正类型,并生成发出重复运行指令,能够实现连续多次矫正,确保实际距离ds最终落入第一预设距离范围/第二预设距离范围内。
158.优选的,所述获取模块还用于定时获取即时姿态信息,将所述即时姿态信息发送至提示模块;
159.所述提示模块还用于定时获取所述即时姿态信息,识别处理即时姿态信息;若即时姿态信息表示姿态不正常,则生成并发送提示信息。
160.具体的,所述即时姿态信息包括但不限于图像信息。
161.示例性的,提示模块每间隔一段时间,通过ai摄像头获取一次图像信息;识别分析图像信息内的人像姿态特征。例如,若当前使用者坐姿规范,且正对桌面,则表示坐姿正常。若当前使用者坐姿不规范,或者没有正对桌面,则表示坐姿不正常;发出提示信息,通过喇叭或者显示屏提示使用者调整坐姿。
162.本发明实施例提供了一种智能电动桌,所述智能电动桌包括:电动桌本体、上述控制系统、ai摄像头和提示终端。
163.所述电动桌本体包括:
164.桌面,所述桌面与驱动装置传动连接,可实现升降;
165.驱动装置,与所述桌面传动连接,与所述控制系统信号连接;
166.画板,安装在所述桌面上,可翻转打开或闭合收纳在桌面内。
167.优先的,所述电动桌本体上还设置有:
168.压力传感器,安装在画板处,与控制系统信号连接,当画板打开或闭合时,生成并发出触发信号。
169.进一步的,所述ai摄像头、控制系统和提示终端均安装在电动桌本体上。
170.所述ai摄像头包括主板和摄像头。例如,所述ai摄像头基于firefly-rk3399开源主板与高清摄像头实现。
171.优选的,所述控制系统可集成在ai摄像头内。
172.进一步优选的,所述控制系统集成在所述主板上。
173.具体的,所述提示终端与所述控制系统信号连接,所述提示终端包括但不限于喇叭或显示屏。
174.需要说的是,带有画板的电动桌属于公知技术,具体结构细节此处不再赘述。
175.通过在电动桌上设置ai摄像头、控制系统和提示终端,并实施上述控制方法,使电动桌实现智能调节功能。提高电动桌的智能健康监测功能,可以防止近视,防止脊柱弯曲。并且本实施例中提出的智能电动桌满足不同的使用场景,无需手动调节,体验感极佳。
176.优选的,所述电动桌本体上还设置有操作开关,所述操作开关与所述驱动装置电性连接。
177.在不启动ai摄像头的情况下,可以通过操作开关直接控制驱动装置运行,实现手动调节桌面高度。使电动桌具备可切换手动调节和自动调节的功能。
178.尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。