基于可观测弧段测轨信息的空间目标isar定标方法
技术领域
1.本技术涉及雷达成像技术领域,特别是涉及一种基于可观测弧段测轨信息的空间目标isar定标方法。
背景技术:
2.地基空间监视雷达作为空间信息获取的主要来源,其形成的逆合成孔径雷达(isar:inverse synthetic aperture radar)图像能有效揭示空间目标散射点的相对位置及强度分布。逆合成孔径雷达通过发射宽频带信号和利用多普勒频率分辨实现二维的高分辨,可用于对空间目标等运动目标进行全天候、全天时、远距离二维成像,在判别空间目标类型、分析目标重要结构、推断目标功能属性方面发挥了重要作用。isar像的纵向分辨率由雷达信号的带宽决定,是已知量;横向分辨率则由发射信号波长以及在成像时间内目标相对雷达视线(los:line of sight)转过的转角与目标姿态矢量形成的有效转角共同决定。而实际上由于isar目标的非合作性,总转角未知,因此横向分辨率未知,导致isar像不能反映目标真实尺寸,不利于目标识别。因此,如何快速有效地实现空间目标的isar图像横向定标是isar领域中亟待解决的问题。
3.当前,isar图像横向定标技术大多数都是通过对等效旋转角速度搜索的方式,基于图像最小熵准则进行等效旋转角速度寻优,从而估计出目标的等效角速度,实现最终的isar图像方位向定标,但是该类方法寻优过程繁琐,迭代次数过多,实时性求解效率差,参见文献:张成祥.空间非合作自旋目标isar成像及方位定标.。针对空间目标的isar图像横向定标方法则主要是利用单幅图像测轨信息进行观测矢量、姿态矢量与速度矢量的近似,通过矢量运算得到最终的定标结果,但是该类方法仅仅利用了单幅isar图像测轨信息,导致算法鲁棒性较差。总的来看,现有isar图像定标技术方法鲁棒性与算法时效性较差,需要提出一种更加稳健高效的空间目标isar图像横向定标方法。
技术实现要素:
4.基于此,有必要针对上述技术问题,提供一种能够实现isar图像方位向准确定标的基于可观测弧段测轨信息的空间目标isar定标方法。
5.一种基于可观测弧段测轨信息的空间目标isar定标方法,所述方法包括:
6.获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
7.根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;
8.根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
9.根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进
行计算,得到所述空间目标在isar成像平面内等效旋转角速度;
10.根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。
11.在其中一实施例中,所述空间目标的测轨信息包括:所述雷达站距离地心的距离、所述空间目标距离地心的距离,雷达发射脉冲中心频率,雷达脉冲重复频率、带宽,以及各幅isar图像所对应的成像开始时刻、成像结束时刻、单幅isar图像对应的观测斜距与方位向采样点数。
12.在其中一实施例中,计算所述轨道圆心角数值采用以下公式:
[0013][0014]
在上式中,t
istart
为单幅isar图像所对应的成像开始时刻,t
apse
为当前可观测弧段拱点对应的观测时刻,t为所述空间目标的运行周期,ra为所述空间目标距离地心的距离,μ为开普勒常数。
[0015]
在其中一实施例中,根据所述空间目标的可观测弧段内的所有测轨信息得到雷达站与轨道面夹角数值包括:
[0016]
根据所述空间目标的测轨信息进行计算,得到空间目标至地心连线,与雷达站至地心连线形成的第一夹角数值;
[0017]
所述雷达站与轨道面夹角数值为所述第一夹角数据的最小值,也就是所述空间目标到达可观测弧段的拱点位置时。
[0018]
在其中一实施例中,在计算所述空间目标在isar成像平面内等效旋转角速度时,分别在惯性定向情况下以及对地定向情况下,计算所述空间目标在isar成像平面内等效旋转角速度。
[0019]
在其中一实施例中,在惯性定向情况下,计算所述空间目标在isar成像平面内等效旋转角速度采用以下公式:
[0020][0021]
在对地定向情况下,计算所述空间目标在isar成像平面内等效旋转角速度采用以下公式:
[0022][0023]
在上两个公式中,ra为所述空间目标距离地心的距离,rc为雷达站距离地心的距离,θi为所述轨道圆心角数值,ζ为雷达站与轨道面夹角数值,g为引力常数,m为地球质量。
[0024]
在其中一实施例中,所述根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子包括:
[0025]
根据isar图像数据成像时间以及所述isar成像平面内等效旋转角速度进行计算得到isar图像成像过程中,所述空间目标的成像有效转动量,再根据所述成像有效转动量计算得到理论横向定标因子。
[0026]
在其中一实施例中,所述根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正包括:
[0027]
根据isar图像数据成像时间段内理论方位向采样个数与实际isar图像数据方位向脉冲个数的比值计算得到定标修正因子,并根据所述定标修正因子对所述理论横向定标因子进行修正。
[0028]
一种基于可观测弧段测轨信息的空间目标isar定标装置,所述装置包括:
[0029]
测轨信息获取模块,用于获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
[0030]
轨道圆心角计算模块,用于根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;
[0031]
雷达站与轨道面夹角计算模块,用于根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
[0032]
等效旋转角速度计算模块,用于根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到所述空间目标在isar成像平面内等效旋转角速度;
[0033]
isar横向定标模块,用于根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。
[0034]
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
[0035]
获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
[0036]
根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;
[0037]
根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
[0038]
根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到所述空间目标在isar成像平面内等效旋转角速度;
[0039]
根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。
[0040]
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
[0041]
获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
[0042]
根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;
[0043]
根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
[0044]
根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到所述空间目标在isar成像平面内等效旋转角速度;
[0045]
根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。
[0046]
上述基于可观测弧段测轨信息的空间目标isar定标方法,通过空间目标的可观测弧段内的所有测轨信息进行计算得到轨道圆心角,以及雷达站与轨道夹角数值,并利用这两个数值以及各幅isar图像对应的测轨信息进行计算得到理论横向定标因子,再根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成空间目标的isar横向定标,本方法定标算法鲁棒性与实时性更高。
附图说明
[0047]
图1为一个实施例中基于可观测弧段测轨信息的空间目标isar定标方法的流程示意图;
[0048]
图2为一个实施例中空间目标成像观测几何场景示意图;
[0049]
图3为实验中整条可见观测轨道对应的等效旋转角速度对比示意图;
[0050]
图4为实验中整条可见观测轨道对应的等效旋转角速度对比示意图;
[0051]
图5为实验中部分可见观测轨道对应的横向定标结果对比示意图;
[0052]
图6为实验中部分可见观测轨道对应的横向定标结果对比示意图;
[0053]
图7为一个实施例中空间目标isar定标装置的结构框图;
[0054]
图8为一个实施例中计算机设备的内部结构图。
具体实施方式
[0055]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不
用于限定本技术。
[0056]
针对现有技术中,地基空间监视雷达对空间目标进行可观测弧段isar成像时,无法对空间目标isar图像实现有效的方位向尺寸估计的情况下,如何利用在可观测弧段获取的窄带测量数据,计算空间目标相对于雷达观测视线的有效转动量,从而获取isar图像准确的横向分辨率与目标的方位向真实物理尺寸,为实现isar图像方位向准确定标,提供一种有效的方法。
[0057]
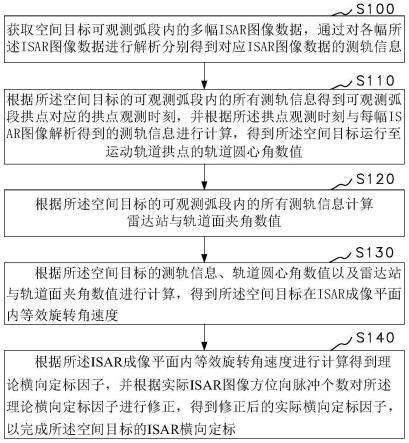
如图1所示,本技术提供了一种基于可观测弧段测轨信息的空间目标isar定标方法,该方法包括:
[0058]
步骤s100,获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
[0059]
步骤s110,根据空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到空间目标运行至运动轨道拱点的轨道圆心角数值;
[0060]
步骤s120,根据空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
[0061]
步骤s130,根据空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到空间目标在isar成像平面内等效旋转角速度;
[0062]
步骤s140,根据isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成空间目标的isar横向定标。
[0063]
在本实施例中,针对地基精密跟踪成像雷达对低轨空间目标进行监视场景下的isar图像横向定位方法,该方法通过可观测弧段中一系列isar图像中包含的测轨信息,为isar图像定标工作提供更多的信息增益,进而计算得到在惯性定向与对地定型两种定向方式情况下的空间目标姿态相对于雷达视线形成的等效旋转角速度。最后,结合isar成像所用时间段,计算得到当前isar图像对应的有效转动量,从而完成最终的横向定标。与现有的单幅图像测轨信息定标方法相比,本方法利用可观测弧段的全部测轨信息进行isar图像的横向定标因子求解,并根据实际isar图像方位向脉冲个数进行定标结果的修正,具有更好的鲁棒性与更高的实时性。
[0064]
图2为本方法实施的空间目标成像观测几何场景,在对本方法进行理解时可结合图2使得本方法描述的更为清楚。
[0065]
如图2所示,空间目标a在其轨道上运行,o为地心,c为地基雷达位置,ra、rc分别代表目标与雷达距离地心的距离,pq代表雷达可观测弧段,d点为观测弧段拱点。ξ为可见弧段对应圆心角的一半,e则是雷达c在轨道平面的投影点,对应∠coe为ζ。另外,r代表los矢量,其模长为ri,v为目标切向速度,n为v在los垂直方向的分量,ωs为目标姿态变化对应的旋转矢量,并垂直与轨道平面,ωv为los旋转矢量,两者合成的相对旋转矢量表示为ω,其模长代表实际成像过程中的等效旋转角速度。
[0066]
已知一部地基精密跟踪成像雷达对一个空间目标进行跟踪观测,在对空间目标的可观测弧段内,地基雷达对空间目标共形成n幅isar图像,也就是步骤s100中获取的isar图像数据,每幅isar图像对应的成像开始时刻为t
istart
,成像结束时刻为t
iend
,每幅isar图像
对应的观测斜距为ri,方位向采样点数为
[0067]
再对isar图像数据进行解析可得到在每幅isar图像中,空间目标的测轨信息,首先可以解析得到雷达编号与空间目标的编号,从而可以得到雷达站距离地心的距离rc、空间目标距离地心的距离ra,雷达发射脉冲中心频率fs,雷达脉冲重复频率prf、带宽b。;另外还可以得到各幅isar图像所对应的成像开始时刻t
istart
、成像结束时刻t
iend
、单幅isar图像对应的观测斜距ri与方位向采样点数这些雷达参数与空间目标测轨信息均为定标流程关键参数提供的数据准备。
[0068]
在步骤s110以及步骤s120中,通过使用空间目标在可观测弧段的全部测轨进行对轨道圆心角数值以及雷达至轨道面夹角数据进行求解,使得在后续横向定标时更为准确。
[0069]
具体的,在求解轨道圆心角数值时,低轨空间目标运行轨道的偏心率非常接近于零,其运行轨道接近一个圆,对应的运行周期与轨道半径有关。当空间目标轨道半径为ra时,其运行周期t可以表示为:
[0070][0071]
在公式(1)中,μ为开普勒常数,其数值为3.9861
×
10
14
(m3/s2),空间目标运行周期的单位为秒(s)。
[0072]
由于,低级雷达对空间目标观测斜距最短的位置为可见轨道段的拱点,当前可观测弧段拱点对应的观测时刻可以表示为t
apse
。此时,通过其他成像时刻与拱点时刻的差值与运行周期的比例关系,即可得到空间目标到运行轨道拱点的轨道圆心角。由于isar图像成像时间段很短,因此本发明用isar图像成像开始时刻近似表示整体成像时刻,此时空间目标的轨道圆心角可以表示为:
[0073][0074]
在公式(2)中,t
istart
为单幅isar图像所对应的成像开始时刻,t
apse
为当前可观测弧段拱点对应的观测时刻,t为空间目标的运行周期,ra为空间目标距离地心的距离,μ为开普勒常数。
[0075]
具体的,在对雷达站至地心连线与轨道面的夹角(也就是雷达站-轨道面夹角)进行求解时,根据空间目标的测轨信息进行计算,得到空间目标至地心连线,与雷达站至地心连线形成的第一夹角数值,雷达站与轨道面夹角数值为第一夹角数据的最小值,也就是空间目标到达可观测弧段的拱点位置时。
[0076]
进一步的,从步骤s100中,可以得到可观测弧段内空间目标距离地基雷达的实时距离ri。从图2中可以看出,空间目标至地心连线长度ra、雷达站至地心连线长度rc与实时探测斜距共同构成一个三角形,根据余弦定理,即可计算得到空间目标至地心连线与雷达站
至地心连线形成的夹角∠coai,可以表示为:
[0077][0078]
另外,雷达站至地心连线与轨道面的夹角∠cod=ζ,其值可以表示为:ζ=min(∠coai),也称为雷达站-轨道面夹角,对于当前圈次的可观测弧段来说,其数值为一个定值。
[0079]
接下来,在计算空间目标在isar成像平面内等效旋转角速度时,分别在惯性定向情况下以及对地定向情况下,计算空间目标在isar成像平面内等效旋转角速度。
[0080]
具体的,绝大多数空间目标在空间运行的定向方式可以分为对地定向方式与惯性定向方式,其不同的定向方式会导致isar成像平面内的等效旋转角速度不同。
[0081]
在惯性定向情况下,计算空间目标在isar成像平面内等效旋转角速度采用以下公式:
[0082][0083]
在对地定向情况下,计算空间目标在isar成像平面内等效旋转角速度采用以下公式:
[0084][0085]
在上公式(4)和(5)中,g为引力常数,m为地球质量。
[0086]
在步骤s140中,根据isar成像平面内等效旋转角速度进行计算得到理论横向定标因子包括:根据isar图像数据成像时间以及isar成像平面内等效旋转角速度进行计算得到isar图像成像过程中空间目标的成像有效转动量,再根据成像有效转动量计算得到理论横向定标因子。
[0087]
具体的,对于可观测弧段isar图像的第i幅图像,其成像时间段可以表示为:ti=t
iend-t
istart
。
[0088]
惯性定向情况下,第i幅isar图像成像过程中空间目标的成像有效转动量可以表示为:对应的理论横向定标因子为:
[0089][0090]
对地定向情况下,第i幅isar图像成像过程中空间目标的成像有效转动量可以表示为:对应的理论横向定标因子为:
[0091]
[0092]
在本实施例中,根据实际isar图像方位向脉冲个数对理论横向定标因子进行修正包括:根据isar图像数据成像时间段内理论方位向采样个数与实际isar图像数据方位向脉冲个数的比值计算得到定标修正因子,并根据定标修正因子对理论横向定标因子进行修正。
[0093]
具体的,在成像过程中往往会进行过采样(多点傅里叶变换)或者欠采样(方位向帧数抽取)的操作,因此需要对理论横向定标因子进行修正。第i幅isar图像的定标修正因子ηi为成像时间段内理论方位向采样个数与实际isar图像方位向脉冲个数的比值,其数值表示为:
[0094][0095]
惯性定向情况下,第i幅isar图像修正后的横向定标因子(每个方位向像素代表的实际物理尺寸)为:
[0096][0097]
对地定向情况下,第i幅isar图像修正后的横向定标因子(每个方位向像素代表的实际物理尺寸)为:
[0098][0099]
通过以上五个步骤的处理,即可完成isar图像横向定标。对于指定空间目标而言,其定向方式只有一种,通过空间目标的定轨编目信息以及其他先验信息,即可确定该空间目标唯一对应的定向方式,当在第i幅isar图像成像中,空间目标isar图像在方位向跨越了mi个方位单元,则空间目标的实际物理尺寸可以表示为:
[0100][0101]
通过上述步骤可得到isar图像数据中,空间目标在可观测弧段内每幅isar图像中的实际物理尺寸。
[0102]
为了表明本方法的有效性,还根据本方法进行了实验,如图3至图6是利用本方法对实验数据进行横向定标的实验结果。图4与图6分别对应图3与图5方框中数据放大图。实验场景中雷达的脉冲重复频率prf为28hz,发射信号的中心频率fs为20ghz。地基雷达对空
间目标观测过程中共得到255幅isar图像。
[0103]
如图3及图4所示,分别展示了针对整条可见观测轨道与部分可见观测轨道情况下两种定标方法得到的空间目标等效旋转角速度。从图4中可以明显看出,由于基于单幅图像测轨信息的isar横向定标方法仅利用了单幅图像的测轨信息,且在计算过程中通过开始时刻与结束时刻空间目标所对应的两个位置对其运行速度矢量进行了近似,导致该方法计算得到的等效旋转角速度出现明显的错误。但是,空间目标在运行过程中,其等效旋转角速度是趋于平滑的,不会出现图3与图4中所示的明显尖峰。而本方法基于可见弧段测轨信息的isar图像横向定标方法综合利用了整条轨道的测轨信息,所得结果没有明显尖峰,更加趋于平滑,鲁棒性更好。
[0104]
如图5及图6所示,分别展示了针对整条可见观测轨道与部分可见观测轨道情况下两种定标方法得到的isar图像横向定标结果。从图6中可以明显看出,基于单幅图像测轨信息的isar横向定标方法所得方位向定标结果出现明显跳动,导致isar图像反映的空间目标物理尺寸出现求解错误,而本方法基于可见弧段测轨信息的isar图像横向定标方法所得结果更优,鲁棒性更好。
[0105]
上述基于可观测弧段测轨信息的空间目标isar定标方法中,通过利用整条可观测轨道的测轨信息计算得到空间目标至运行轨道拱点的轨道圆心角、以及雷达站-轨道面夹角,并通过这两个参数以及各幅isar图像的测轨信息计算得到对应每幅isar图像成像平面内等效旋转角速度,再根据成像平面内等效旋转角速度计算得到理论横向定标因子,在根据实际isar图像方位向脉冲个数对理论横向定标因子进行修正,最后根据修正后的横向定标因子得到isar图像中的空间目标的实际物理尺寸,该方法具有更好的鲁棒性以及更高的实时性。
[0106]
应该理解的是,虽然图1的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0107]
在一个实施例中,如图7所示,提供了一种基于可观测弧段测轨信息的空间目标isar定标装置,包括:测轨信息获取模块700、轨道圆心角计算模块710、雷达站与轨道面夹角计算模块720、等效旋转角速度计算模块730和isar横向定标模块740,其中:
[0108]
测轨信息获取模块700,用于获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
[0109]
轨道圆心角计算模块710,用于根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;
[0110]
雷达站与轨道面夹角计算模块720,用于根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
[0111]
等效旋转角速度计算模块730,用于根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到所述空间目标在isar成像平面内等效旋转
角速度;
[0112]
isar横向定标模块740,用于根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。
[0113]
关于基于可观测弧段测轨信息的空间目标isar定标装置的具体限定可以参见上文中对于基于可观测弧段测轨信息的空间目标isar定标方法的限定,在此不再赘述。上述基于可观测弧段测轨信息的空间目标isar定标装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0114]
在一个实施例中,提供了一种计算机设备,该计算机设备可以是终端,其内部结构图可以如图8所示。该计算机设备包括通过系统总线连接的处理器、存储器、网络接口、显示屏和输入装置。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种基于可观测弧段测轨信息的空间目标isar定标方法。该计算机设备的显示屏可以是液晶显示屏或者电子墨水显示屏,该计算机设备的输入装置可以是显示屏上覆盖的触摸层,也可以是计算机设备外壳上设置的按键、轨迹球或触控板,还可以是外接的键盘、触控板或鼠标等。
[0115]
本领域技术人员可以理解,图8中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
[0116]
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:
[0117]
获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
[0118]
根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;
[0119]
根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
[0120]
根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到所述空间目标在isar成像平面内等效旋转角速度;
[0121]
根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。
[0122]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
[0123]
获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;
[0124]
根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;
[0125]
根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;
[0126]
根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到所述空间目标在isar成像平面内等效旋转角速度;
[0127]
根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。
[0128]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0129]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0130]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。