技术特征:
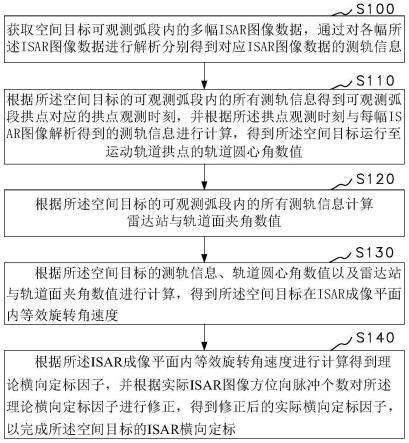
1.基于可观测弧段测轨信息的空间目标isar定标方法,其特征在于,所述方法包括:获取空间目标可观测弧段内的多幅isar图像数据,通过对各幅所述isar图像数据进行解析分别得到对应isar图像数据的测轨信息;根据所述空间目标的可观测弧段内的所有测轨信息得到可观测弧段拱点对应的拱点观测时刻,并根据所述拱点观测时刻与每幅isar图像解析得到的测轨信息进行计算,得到所述空间目标运行至运动轨道拱点的轨道圆心角数值;根据所述空间目标的可观测弧段内的所有测轨信息计算雷达站与轨道面夹角数值;根据所述空间目标的测轨信息、轨道圆心角数值以及雷达站与轨道面夹角数值进行计算,得到所述空间目标在isar成像平面内等效旋转角速度;根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子,并根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成所述空间目标的isar横向定标。2.根据权利要求1所述的空间目标isar定标方法,其特征在于,所述空间目标的测轨信息包括:所述雷达站距离地心的距离、所述空间目标距离地心的距离,雷达发射脉冲中心频率,雷达脉冲重复频率、带宽,以及各幅isar图像所对应的成像开始时刻、成像结束时刻、单幅isar图像对应的观测斜距与方位向采样点数。3.根据权利要求2所述的空间目标isar定标方法,其特征在于,计算所述轨道圆心角数值采用以下公式:在上式中,t
istart
为单幅isar图像所对应的成像开始时刻,t
apse
为当前可观测弧段拱点对应的观测时刻,t为所述空间目标的运行周期,r
a
为所述空间目标距离地心的距离,μ为开普勒常数。4.根据权利要求3所述的空间目标isar定标方法,其特征在于,根据所述空间目标的可观测弧段内的所有测轨信息得到雷达站与轨道面夹角数值包括:根据所述空间目标的测轨信息进行计算,得到空间目标至地心连线,与雷达站至地心连线形成的第一夹角数值;所述雷达站与轨道面夹角数值为所述第一夹角数据的最小值,也就是所述空间目标到达可观测弧段的拱点位置时。5.根据权利要求4所述的空间目标isar定标方法,其特征在于,在计算所述空间目标在isar成像平面内等效旋转角速度时,分别在惯性定向情况下以及对地定向情况下,计算所述空间目标在isar成像平面内等效旋转角速度。6.根据权利要求5所述的空间目标isar定标方法,其特征在于,在惯性定向情况下,计算所述空间目标在isar成像平面内等效旋转角速度采用以下公
式:在对地定向情况下,计算所述空间目标在isar成像平面内等效旋转角速度采用以下公式:在上两个公式中,r
a
为所述空间目标距离地心的距离,r
c
为雷达站距离地心的距离,θ
i
为所述轨道圆心角数值,ζ为雷达站与轨道面夹角数值,g为引力常数,m为地球质量。7.根据权利要求6所述的空间目标isar定标方法,其特征在于,所述根据所述isar成像平面内等效旋转角速度进行计算得到理论横向定标因子包括:根据isar图像数据成像时间以及所述isar成像平面内等效旋转角速度进行计算得到isar图像成像过程中所述空间目标的成像有效转动量,再根据所述成像有效转动量计算得到理论横向定标因子。8.根据权利要求7所述的空间目标isar定标方法,其特征在于,所述根据实际isar图像方位向脉冲个数对所述理论横向定标因子进行修正包括:根据isar图像数据成像时间段内理论方位向采样个数与实际isar图像数据方位向脉冲个数的比值计算得到定标修正因子,并根据所述定标修正因子对所述理论横向定标因子进行修正。
技术总结
本申请涉及一种基于可观测弧段测轨信息的空间目标ISAR定标方法。所述方法包括:通过根据空间目标的可观测弧段内的所有测轨信息进行计算得到轨道圆心角,以及雷达站与轨道夹角数值,并利用这两个数值以及各幅ISAR图像对应的测轨信息进行计算得到理论横向定标因子,再根据实际ISAR图像方位向脉冲个数对所述理论横向定标因子进行修正,得到修正后的实际横向定标因子,以完成空间目标的ISAR横向定标。采用本方法的鲁棒性更好,实时性更高。实时性更高。实时性更高。
技术研发人员:蒋李兵 王壮 杨庆伟 郑舒予 裴雪娇 丁瑞 任笑圆 逄博 王粲雨
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2022.08.11
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。