1.本发明涉及高光谱技术、人工智能及城市遥感应用技术领域,尤其涉及一种适用于高分高光谱数据的城市典型地物精细分类方法。
背景技术:
2.高光谱技术作为近年来的热门技术一直广受关注,高光谱所具有的空谱合一的特点使其在遥感对地观测方面具有天然的优势。随着我国高光谱载荷研制技术的不断进步,先后推出了高分五号、资源1-02d等国产卫星高光谱载荷,近年来又研制出具备亚米级空间分辨率的机载高光谱载荷。传统高光谱数据由于空间分辨率的不足,其应用目标往往以大尺度的自然要素为主,如林地、水、农作物等。空间分辨率的提高使得高光谱能够在城市遥感领域发挥重要作用。然而由于高光谱具备上百个波段,空间分辨率的提高使得其数据量巨增,为其后续应用提出新的挑战。
3.传统基于高光谱进行典型地物分类的方法可概括为三类:图像增强法、光谱特征识别法、传统机器学习法。图形增强法如最小噪声分离(mnf)、主成分分析(pca)、波段比值等方法简单高效的提取目标特征,但不能够直接完成分类;光谱特征识别方法以光谱特征提取和光谱匹配方法为基础,这类方法需要专家知识引导的同时,且复杂场景下应用泛化能力有限;传统机器学习法如支持向量机、随机森林等虽然相对于前两种方法具有更好的泛化能力,但由于没有充分考虑数据的空间特征,往往存在显著的“椒盐效应”。
4.随着深度学习技术在遥感领域的快速发展,推动了卷积神经网络在地物分类方面的应用。然而,目前以纯监督学习为主的分类模型对于样本要求较高,而由于高光谱数据的匮乏,大部分应用场景均属于小样本分类。因而,针对高分辨率的高光谱数据,如何从样本增广及训练策略的优化角度来设计深度学习模型,并将模型运用于城市典型地物的分类中,是当前函待解决的难题。
技术实现要素:
5.为解决上述技术问题,本发明提供了一种适用于高分高光谱数据的城市典型地物精细分类方法。
6.本发明的一种适用于高分高光谱数据的城市典型地物精细分类方法的技术方案如下:
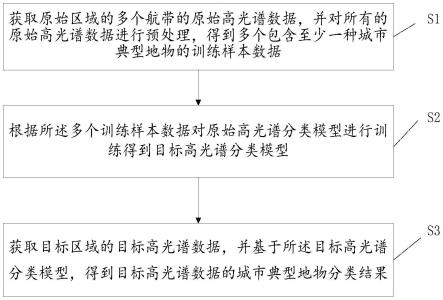
7.s1、获取原始区域的多个航带的原始高光谱数据,并对所有的原始高光谱数据进行预处理,得到多个包含至少一种城市典型地物的训练样本数据;
8.s2、根据所述多个训练样本数据对原始高光谱分类模型进行训练,得到目标高光谱分类模型;
9.s3、获取目标区域的目标高光谱数据,并基于所述目标高光谱分类模型,得到所述目标高光谱数据的城市典型地物分类结果。
10.本发明的一种适用于高分高光谱数据的城市典型地物精细分类方法的有益效果
如下:
11.本发明的方法采用提升样本数据量的方式,并设计卷积自编码网络对高光谱分类模型进行构建与训练,利用训练好的语义分割模型,实现对典型地物的精细化分类的同时,也为新型高光谱载荷在城市遥感领域的拓展应用提供了技术支撑。
12.在上述方案的基础上,本发明的一种适用于高分高光谱数据的城市典型地物精细分类方法还可以做如下改进。
13.进一步,所述s1包括:
14.s11、对所有的原始高光谱数据进行依次辐射均一性校正和影像镶嵌处理,得到镶嵌高光谱数据;
15.s12、对所述镶嵌高光谱数据进行大气校正处理,得到反射率数据,并对筛选后的反射率数据中的每个波段进行pca变换,得到变换高光谱数据;
16.s13、根据所述反射率数据和所述变换高光谱数据,构建多个波段高光谱数据;
17.s14、对每个波段高光谱数据进行切片处理,得到并对所有的切片高光谱数据进行增强处理,得到多个训练样本数据。
18.进一步,所述s13包括:
19.s131、在所述变换高光谱数据中,获取预设数量的波段高光谱数据;
20.s132、获取所述反射率数据中的真彩色波段数据和分类真值标签数据;
21.s133、根据所述预设数量的波段高光谱数据、所述真彩色波段数据和所述分类真值标签数据,构建所述多个波段高光谱数据。
22.进一步,所述原始高光谱分类模型包括:原始卷积自编码器网络和原始语义分割网络,则所述s2包括:
23.s21、采用所述多个训练样本数据对所述原始卷积自编码器网络进行迭代预训练,得到目标卷积自编码器网络;
24.s22、采用所述多个训练样本数据对所述原始语义分割网络进行迭代训练,得到目标语义分割网络;
25.s23、根据所述目标卷积自编码器网络和所述目标语义分割网络,得到所述目标高光谱分类模型。
26.进一步,所述原始卷积自编码器网络包括:原始编码器和原始解码器,则所述s21包括:将每个训练样本数据分别作为所述原始编码器的输入特征和所述原始解码器的输出特征进行迭代预训练,并采用均方根误差作为损失函数,直至所述损失函数降低且趋于收敛时,得到所述目标卷积自编码器网络。
27.进一步,所述原始语义分割网络包括:原始语义分割解码器和所述目标卷积自编码器网络的目标编码器,则s22包括:将所述目标编码器的参数进行锁定,并采用所述多个训练样本数据对所述原始语义分割解码器进行迭代训练,得到所述目标语义分割网络。
28.进一步,还包括:采用所述原始区域的验证样本数据,根据所述验证样本数据对所述目标高光谱分类模型进行修正,将修正后的目标高光谱分类模型确定为所述目标高光谱分类模型。
29.本发明的一种典型地物分类系统的技术方案如下:
30.包括:处理模块、训练模块和运行模块;
31.所述处理模块用于:获取原始区域的多个航带的原始高光谱数据,并对所有的原始高光谱数据进行预处理,得到多个包含至少一种城市典型地物的训练样本数据;
32.所述训练模块用于:根据所述多个训练样本数据对原始高光谱分类模型进行训练,得到目标高光谱分类模型;
33.所述运行模块用于:获取目标区域的目标高光谱数据,并基于所述目标高光谱分类模型,得到目标高光谱数据的城市典型地物分类结果。
34.本发明的一种典型地物分类系统的有益效果如下:
35.本发明的系统采用提升样本数据量的方式,并设计卷积自编码网络对高光谱分类模型进行构建与训练,利用训练好的语义分割模型,实现对典型地物的精细化分类的同时,也为新型高光谱载荷在城市遥感领域的拓展应用提供了技术支撑。
36.在上述方案的基础上,本发明的一种典型地物分类系统还可以做如下改进。
37.进一步,所述处理模块包括:第一处理模块、第二处理模块、第三处理模块和第四处理模块;
38.所述第一处理模块用于:对所有的原始高光谱数据进行依次辐射均一性校正和影像镶嵌处理,得到镶嵌高光谱数据;
39.所述第二处理模块用于:对所述镶嵌高光谱数据进行大气校正处理,得到反射率数据,并对筛选后的反射率数据中的每个波段进行pca变换,得到变换高光谱数据;
40.所述第三处理模块用于:根据所述反射率数据和所述变换高光谱数据,构建多个波段高光谱数据;
41.所述第四处理模块用于:对每个波段高光谱数据进行切片处理,得到并对所有的切片高光谱数据进行增强处理,得到多个训练样本数据。
42.进一步,所述所述第三处理模块具体用于:
43.在所述变换高光谱数据中,获取预设数量的波段高光谱数据;
44.获取所述反射率数据中的真彩色波段数据和分类真值标签数据;
45.根据所述预设数量的波段高光谱数据、所述真彩色波段数据和所述分类真值标签数据,构建所述多个波段高光谱数据。
附图说明
46.图1为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法的流程示意图;
47.图2为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法中的数据切片处理的流程示意图;
48.图3为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法中的数据增强处理的流程示意图;
49.图4为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法中的原始编码器的rcb卷积单元的结构示意图;
50.图5为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法中的目标高光谱分类模型的结构示意图;
51.图6为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法
中的原始语义分割解码器的结构示意图;
52.图7为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法中的目标区域的目标高光谱数据的示意图;
53.图8为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法中的目标区域的城市典型地物分类结果示意图;
54.图9为本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类系统的结构示意图。
具体实施方式
55.如图1所示,本发明实施例的一种适用于高分高光谱数据的城市典型地物精细分类方法,包括如下步骤:
56.s1、获取原始区域的多个航带的原始高光谱数据,并对所有的原始高光谱数据进行预处理,得到多个包含至少一种城市典型地物的训练样本数据。
57.其中,原始区域为:某一城市区域。原始高光谱数据为:通过机载高光谱传感器飞行获取的多个航带的高光谱数据(高光谱图像),由于高光谱数据有上百个波段,且高光谱传感器时机载的,飞行是按照航带的,因而获取数据也是分航带的,航带与航带数据质检有一定的重叠,其中的每个航带所获取的数据为原始高光谱数据。训练样本数据为:经过图像(影像)预处理后所得到的高光谱数据,每个训练样本数据中至少包括一种类型的城市典型地物。城市典型地物包括但不限于:道路、农作物、房屋、水体等。
58.s2、根据所述多个训练样本数据对原始高光谱分类模型进行训练,得到目标高光谱分类模型。
59.其中,原始高光谱分类模型为:未经训练的网络模型,由卷积自编码器网络和语义分割网络所构成。目标高光谱分类模型为:经过多个训练样本数据训练对原始高光谱分类模型进行训练后所得到的网络模型,能够用于对某个区域的高光谱数据进行典型地物分类。
60.s3、获取目标区域的目标高光谱数据,并基于所述目标高光谱分类模型,得到所述目标高光谱数据的城市典型地物分类结果。
61.其中,目标高光谱数据的获取方式与原始区域的多个航带的原始高光谱数据的获取方式相同。目标区域为:所需要进行城市典型地物分类识别的区域,该区域可以与原始区域相同,也可以与原始区域不同,在此不设限制。
62.较优地,所述s1包括:
63.s11、对所有的原始高光谱数据进行依次辐射均一性校正和影像镶嵌处理,得到镶嵌高光谱数据。
64.其中,对原始高光谱数据进行辐射均一性校正的过程参考《一种机载高光谱遥感数据光度校正方法》中对高光谱数据进行校正的技术方案,其目的是利用传感器观测角度与辐亮度值之间的函数关系,消除由于地表二向性引起机载高光谱的多个航带影像之间的辐射非均一现象。
65.其中,对经过辐射均一性校正后的原始高光谱数据进行影像镶嵌处理的过程为现有技术。
66.s12、对所述镶嵌高光谱数据进行大气校正处理,得到反射率数据,并对筛选后的反射率数据中的每个波段进行pca变换,得到变换高光谱数据。
67.其中,大气校正为现有技术,在此不过多赘述。反射率数据为:经过大气校正后的图像数据。对镶嵌高光谱数据进行筛选的过程包括:剔除镶嵌反射率数据中的受水汽影响等坏波段。对每个波段进行pca变换的过程为现有技术,其目的是对具有数百个波段的高光谱进行特征筛选,最大限度排除冗余信息,保留分类有效信息。变换高光谱数据为:经过pca变换的高光谱数据。
68.s13、根据所述反射率数据和所述变换高光谱数据,构建多个波段高光谱数据。
69.其中,所述s13包括:
70.s131、在所述变换高光谱数据中,获取预设数量的波段高光谱数据。
71.s132、获取所述反射率数据中的真彩色波段数据和分类真值标签数据。
72.s133、根据所述预设数量的波段高光谱数据、所述真彩色波段数据和所述分类真值标签数据,构建所述多个波段高光谱数据。
73.具体地,例如,提取pca变换后的前n个波段与反射率数据中的红、绿、蓝三个真彩色波段及分类真值标签组成具有n 4个波段高光谱数据。其中,n为正整数,在本实施例中n取总波段数的1/10。
74.s14、对每个波段高光谱数据进行切片处理,得到并对所有的切片高光谱数据进行增强处理,得到多个训练样本数据。
75.其中,对每个波段高光谱数据进行切片处理的过程为:如图2所示,对波段高光谱数据进行随机裁剪,形成若干个256
×
256
×
(n 4)大小的高光谱数据立方体。具体过程为:在影像中设置一个随机点坐标(a,b),以此点为顶点生成256
×
256的裁剪框,并以此对数据进行裁剪,重复n次可以完成切片操作,得到所有的切片高光谱数据。随机点坐标a和b的取值范围分别是0至w-5和0至h-5,w和h被切片的波段高光谱数据的长和宽。
76.其中,对所有的切片高光谱数据进行增强处理的过程为:将得到的n个切片作为数据集data-a,如图3所示,对数据集data-a进行随机的几何增强和色彩增强处理,其中几何增强包括翻转、旋转、缩放、偏移等操作,色彩增强包括改变数据的饱和度、亮度、对比度及锐度,遍历数据集data-a中所有切片进行上述操作将数据集data-a扩充为原来的6倍,构成新的数据集data-b(多个训练样本数据)。
77.较优地,所述原始高光谱分类模型包括:原始卷积自编码器网络和原始语义分割网络,则所述s2包括:
78.其中,在tensorflow环境下搭建cae网络,在构建的原始高光谱分类模型包括:原始卷积自编码器网络和原始语义分割网络。原始卷积自编码器网络(cae)由具有镜像结构的原始编码器和原始解码器构成。原始编码器由五层的rcb卷积单元组成(如图4所示),每个单元均由3d深度可分离卷积层、归一化层、relu激活层组成,原始卷积自编码器网络的结构参数如表1所示。
79.表1:
[0080][0081]
s21、采用所述多个训练样本数据对所述原始卷积自编码器网络进行迭代预训练,得到目标卷积自编码器网络。
[0082]
其中,s21包括:将每个训练样本数据分别作为所述原始编码器的输入特征和所述原始解码器的输出特征进行迭代预训练,并采用均方根误差作为损失函数,直至所述损失函数降低且趋于收敛时,得到所述目标卷积自编码器网络。
[0083]
具体地,对上述构建多个训练样本数据中的影像数据分别作为网络的输入和输出进行迭代预训练,训练过程中采用均方根误差作为损失函数来评价网络对于数据的重构精度,当重构误差下降并趋于平稳后代表模型训练完成。在预训练过程中,将高纬度的高光谱数据进行降维处理,同时最大限度保留用于后续分类的语义特征,以便用于后续分割任务。
[0084]
s22、采用所述多个训练样本数据对所述原始语义分割网络进行迭代训练,得到目标语义分割网络。
[0085]
其中,所述原始语义分割网络包括:原始语义分割解码器和所述目标卷积自编码器网络的目标编码器,则s22包括:将所述目标编码器的参数进行锁定,并采用所述多个训练样本数据对所述原始语义分割解码器进行迭代训练,得到所述目标语义分割网络。
[0086]
s23、根据所述目标卷积自编码器网络和所述目标语义分割网络,得到所述目标高光谱分类模型。
[0087]
具体地,在tensorflow环境下构建原始语义分割网络,用于高光谱数据的典型地物的分类应用,该网络主要由cae网络的目标编码器和原始语义分割解码器两部分组成(如图5)。原始语义分割解码器由两个上采样层,两个cbr卷积单元和一个注意力模块组成,结构如图6所示。对原始语义分割解码器的训练过程为:将目标编码器的参数进行锁定,只训练原始语义分割解码器部分,利用所有训练样本数据通过多轮次的迭代训练得到目标语义分割网络,训练中损失函数采用交叉熵,优化器选择adam。
[0088]
较优地,还包括:采用所述原始区域的验证样本数据,根据所述验证样本数据对所述目标高光谱分类模型进行修正,将修正后的目标高光谱分类模型确定为所述目标高光谱分类模型。
[0089]
具体地,用验证样本数据进行目标高光谱分类模型的预测精度评价,评价指标包括精确度、召回率、f1得分、总体分类精度。例如,将目标高光谱分类模型应用在图7中的目标区域的目标航带数据中,得到图8所示的目标区域的典型地物分类结果,目标区域的典型地物分类精度如表2所示。
[0090]
表2:
[0091][0092]
其中,1-城路;2-村路;3-大棚;4-建筑;5-非主要作物;6-水塘;7-林地;8-水稻;9-水体;10-玉米;11-草地;12-裸地;13-其他。
[0093]
本实施例的技术方案采用提升样本数据量的方式,并设计卷积自编码网络对高光谱分类模型进行构建与训练,利用训练好的语义分割模型,实现对典型地物的精细化分类的同时,也为新型高光谱载荷在城市遥感领域的拓展应用提供了技术支撑。
[0094]
如图9所示,本发明实施例的一种典型地物分类系统200,包括:处理模块210、训练模块220和运行模块230;
[0095]
所述处理模块210用于:获取原始区域的多个航带的原始高光谱数据,并对所有的原始高光谱数据进行预处理,得到多个包含至少一种城市典型地物的训练样本数据;
[0096]
所述训练模块220用于:根据所述多个训练样本数据对原始高光谱分类模型进行训练,得到目标高光谱分类模型;
[0097]
所述运行模块230用于:获取目标区域的目标高光谱数据,并基于所述目标高光谱分类模型,得到所述目标高光谱数据的城市典型地物分类结果。
[0098]
较优地,所述处理模块210包括:第一处理模块、第二处理模块、第三处理模块和第四处理模块;
[0099]
所述第一处理模块用于:对所有的原始高光谱数据进行依次辐射均一性校正和影像镶嵌处理,得到镶嵌高光谱数据;
[0100]
所述第二处理模块用于:对所述镶嵌高光谱数据进行大气校正处理,得到反射率数据,并对筛选后的反射率数据中的每个波段进行pca变换,得到变换高光谱数据;
[0101]
所述第三处理模块用于:根据所述反射率数据和所述变换高光谱数据,构建多个波段高光谱数据;
[0102]
所述第四处理模块用于:对每个波段高光谱数据进行切片处理,得到并对所有的切片高光谱数据进行增强处理,得到多个训练样本数据。
[0103]
较优地,所述所述第三处理模块具体用于:
[0104]
在所述变换高光谱数据中,获取预设数量的波段高光谱数据;
[0105]
获取所述反射率数据中的真彩色波段数据和分类真值标签数据;
[0106]
根据所述预设数量的波段高光谱数据、所述真彩色波段数据和所述分类真值标签数据,构建所述多个波段高光谱数据。
[0107]
本实施例的技术方案采用提升样本数据量的方式,并设计卷积自编码网络对高光谱分类模型进行构建与训练,利用训练好的语义分割模型,实现对典型地物的精细化分类的同时,也为新型高光谱载荷在城市遥感领域的拓展应用提供了技术支撑。
[0108]
上述关于本发明的一种典型地物分类系统200中的各参数和各个模块实现相应功能的步骤,可参考上文中关于一种适用于高分高光谱数据的城市典型地物精细分类方法的实施例中的各参数和步骤,在此不做赘述。
[0109]
本发明实施例提供的一种存储介质,包括:存储介质中存储有指令,当计算机读取所述指令时,使所述计算机执行如上文中的一种适用于高分高光谱数据的城市典型地物精细分类方法的步骤,具体可参考上文中一种适用于高分高光谱数据的城市典型地物精细分类方法的实施例中的各参数和步骤,在此不做赘述。
[0110]
计算机存储介质例如:优盘、移动硬盘等。
[0111]
本发明实施例提供的一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,使所述计算机执行如上文中的一种适用于高分高光谱数据的城市典型地物精细分类方法的步骤,具体可参考上文中的一种适用于高分高光谱数据的城市典型地物精细分类方法的实施例中的各参数和步骤,在此不做赘述。
[0112]
所属技术领域的技术人员知道,本发明可以实现为方法、系统、存储介质和电子设备。
[0113]
因此,本发明可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
