1.本发明涉及调相机管道振动控制领域,具体地,涉及一种调相机管道吸振器的参数设计方法。
背景技术:
2.调相机是我国电网系统进行特高压、直流输电的重要配套设备。调相机的相关配套润滑油管道和冷却管道为调相机的安全稳定运行提供重要保障。然而在实际的工程运行中,由于管道本身结构和支吊架性能的局限性,在调相机转子的激振力作用下,部分管道会发生异常振动,不但会使管道产生不必要的疲劳应力,减少了管道使用寿命,而且在振动剧烈的情况下还会使得支吊架失效,严重影响调相机的安全运行和工作人员的身体健康。
3.大多数的管道异常振动原因是由于管道或系统受到的激励频率与它们的固有频率相近。这种情况下,管道系统的异常振动就可以通过采用吸振器而减弱,这种动力吸振器就是一个简单的弹簧-质量系统,与需要减振的管道系统构成了一个两自由度系统。
4.吸振器是用来降低或抑制不期望的振动的机械装置,它由一个质量块和弹性原件组成,吸振器通常用于以恒定速度运行的机械,因为吸振器工作时是调节到某一特定的频率,且仅是在一个很窄的频带内有效,所以针对不同的管道,不同的情况都需要个性化的设计参数,以使得最终系统的固有频率要远离激励频率。
5.目前的吸振器研究大多集中在吸振器结构创新上,对于吸振器的最基本设计参数设计还缺少相应的指导方法,如果按照管道振动特征依次设计管道参数,会造成吸振器设计参数的大量冗余,在很大程度上会造成资源浪费,提高了吸振器的制造成本。
技术实现要素:
6.针对现有技术中存在的问题,本发明提供了一种调相机管道吸振器的参数设计方法,可以依据实际的管道特征和振动特点,为吸振器提供设计参数,将设计参数进行智能优化后可以降低吸振器参数的冗余度,只需使用较少的吸振器组件满足多样的调相机管道个性化减振需求,大幅度减少吸振器的设计和制造成本,同时方便工作人员的安装使用。
7.为实现上述目的,本发明提供了如下技术方案:一种调相机管道吸振器的参数设计方法,具体包括如下步骤:
8.步骤1:收集调相机管道的数据参数;
9.步骤2:采用收集的数据参数计算振动参数特征矩阵(w,a,f),其中,w为调相机管道振动状态的角速度,f为调相机管道所有振动状态的振动应力,a为调相机管道的最大振动幅度;
10.步骤3:根据振动参数特征矩阵(w,a,f)计算调相机管道吸振器的原始参数群(m2,k2),其中,m2为调相机管道吸振器质量,k2为调相机管道吸振器弹簧刚度;
11.步骤4:根据先验知识从原始参数群(m2,k2)中随机选择合适数量的调相机管道吸振器参数,通过遗传算法对调相机管道吸振器参数进行优化,得到最优的调相机管道吸振
器参数。
12.进一步地,所述数据参数包括:调相机管道振动的振动频率f、振动的最大峰值速度v
max
,测量的调相机管道的外径d、内径d、管道厚度t和振动部分管道长度l,根据调相机管道材料确定的材料密度p和弹性模量e。
13.进一步地,
14.w=2πf
15.a=v
max
/w
16.f=k
eq
×a17.其中,v
max
为调相机振动的最大峰值速度,f为调相机管道振动的振动频率,k
eq
为调相机管道等效弹簧刚度。
18.进一步地,所述调相机管道等效弹簧刚度k
eq
为:
[0019][0020]
其中,e为调相机管道材料的弹性模量,l为调相机管道振动部分的管道长度,i为调相机管道的惯性矩,d为调相机管道的内径,d为调相机管道的外径。
[0021]
进一步地,所述调相机管道吸振器质量所述调相机管道吸振器弹簧刚度k2=w2m2,其中,l2为吸振器配重的最大位移量。
[0022]
进一步地,步骤4包括如下子步骤:
[0023]
步骤4.1、随机选取调相机管道吸振器的原始参数群(m2,k2)中的调相机管道吸振器参数作为遗传算法中的染色体;
[0024]
步骤4.2、判断染色体是否满足优化规则,如满足,输出调相机管道吸振器参数的最优解;如否,执行步骤4.3;
[0025]
步骤4.3、在每一次进化过程中,计算适应度p,并将适应度p从大到小进行排序,将适应度p采用轮盘法选择机制将对应的进行调相机管道吸振器的参数群进行进化,直至适应度p不再发生变化;所述进化过程中,调相机管道吸振器的参数群的交叉概率为0.6,变异概率为0.2。
[0026]
进一步地,所述优化规则为:
[0027]
(a)加装吸振器后调相机管道允许的峰值速度为:其中,c1为调相机管道特征跨距间补偿集中质量影响的修正系数,c2为asme code定义的二次应力指数,k2为局部应力指数,c3为考虑调相机管道介质的修正系数,c4为两端非固定端及非直管管跨的修正系数,c5为管跨测量频率与一阶固有频率不同时的修正系数,β为单位转换系数,s
el
为疲劳应力极限;
[0028]
(b)加装吸振器后的固有频率与激振频率有10%以上的差距;
[0029]
(c)吸振器的最大位移x2不超过预设吸振器配重的最大位移量l2。
[0030]
进一步地,所述加装吸振器后的固有频率其中,k
eq
为调相机管道等效弹簧刚度,m
eq
为调相机管道的等效质量。
[0031]
进一步地,所述吸振器的最大位移其中,m
eq
为调相机管道的等效质量。
[0032]
进一步地,所述适应度的计算过程具体为:
[0033]
p=c/number(f),
[0034]
其中,c为满足优化规则的振动参数特征矩阵(w,a,f)的数量,number(f)为振动参数特征矩阵(w,a,f)的总数量。
[0035]
与现有技术相比,本发明具有以下有益效果:本发明调相机管道吸振器的参数设计方法通过试验方法和模态分析得到调相机管道振动状态,依据振动状态得到吸振器参数并计算振动参数特征矩阵,使得设计的吸振器能够以较少的设备同时满足多根管道、多处位置、多种振动特征的减振要求,同时满足多样化和个性化特点,填补了调相机管道这种在大激振力环境下工作的管道系统吸振器设计空白。本发明方法得到的吸振器具有低冗余度、低成本、高效率的特点。
附图说明
[0036]
图1为调相机转子润滑油进油管道的振动模式示意图;
[0037]
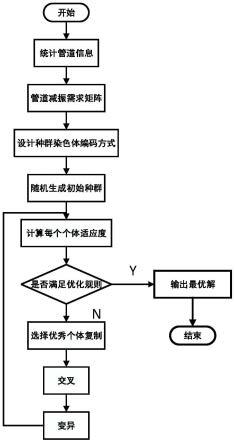
图2为本发明调相机管道吸振器的参数设计方法的流程图。
具体实施方式
[0038]
下面结合附图进一步阐明本发明,应理解该具体实施方式仅用于本发明而不会对本发明的使用范围做出限制,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
[0039]
如图1为调相机转子润滑油进油管道的振动模式示意图,其中1~11为管道支吊架位置,(1)~(14)为振动较大位置。经过试验,异常振动频率f分别为50hz和100hz,最大振动速度主要有179.6mm/s、277mm/s、127mm/s、108mm/s,若直接使用上述参数进行吸振器设计,则需要设计14种不同的吸振器,大大增加吸振器的制造成本。
[0040]
如图2为本发明调相机管道吸振器的参数设计方法的流程图,该调相机管道吸振器的参数设计方法具体包括如下步骤:
[0041]
步骤1:通过试验或者模态分析收集调相机管道的数据参数;本发明中数据参数包括:调相机管道振动的振动频率f、振动的最大峰值速度v
max
,测量的调相机管道的外径d、内径d、管道厚度t和振动部分管道长度l,根据调相机管道材料确定的材料密度p和弹性模量e。
[0042]
步骤2:采用收集的数据参数计算振动参数特征矩阵(w,a,f),为吸振器参数计算提供原始数据,并能够用于后续适应度计算,本发明中振动参数特征矩阵(w,a,f)的计算过
程具体为:
[0043]
w=2πf
[0044]
a=v
max
/w
[0045]
f=k
eq
×a[0046]
其中,w为调相机管道振动状态的角速度,f为调相机管道所有振动状态的振动应力,a为调相机管道的最大振动幅度,v
max
为调相机振动的最大峰值速度,f为振动状态的振动应力,k
eq
为调相机管道等效弹簧刚度,e为调相机管道材料的弹性模量,l为调相机管道振动部分的管道长度,i为调相机管道的惯性矩,d为调相机管道的内径,d为调相机管道的外径。
[0047]
步骤3:根据振动参数特征矩阵(w,a,f)计算调相机管道吸振器的原始参数群(m2,k2),可以从此原始参数群选择后续遗传算法中的初始染色体,并作为交叉和变异的参数选择边界,其中,m2为调相机管道吸振器质量,l2为吸振器配重的最大位移量,k2为调相机管道吸振器弹簧刚度,k2=w2m2。
[0048]
步骤4:根据先验知识从原始参数群(m2,k2)中随机选择合适数量的调相机管道吸振器参数,通过遗传算法对调相机管道吸振器参数进行优化,得到最优的调相机管道吸振器参数,此方法具有适应性高,不容易陷入局部最优等优点,具体包括如下子步骤:
[0049]
步骤4.1、随机选取调相机管道吸振器的原始参数群(m2,k2)中的调相机管道吸振器参数作为遗传算法中的染色体;
[0050]
步骤4.2、判断染色体是否满足优化规则,如满足,输出调相机管道吸振器参数的最优解;如否,执行步骤4.3;
[0051]
步骤4.3、在每一次进化过程中,计算适应度p=c/number(f),并将适应度p从大到小进行排序,将适应度p采用轮盘法选择机制将对应的进行调相机管道吸振器的参数群进行进化,直至适应度p不再发生变化;在进化过程中,调相机管道吸振器的参数群的交叉概率为0.6,即使用部分映射交叉方法,交换两条染色体的信息;变异概率为0.2,即在原始吸振器参数库的极值间取随机值用作个体信息的变异,其中,c为满足优化规则的振动参数特征矩阵(w,a,f)的数量,number(f)为振动参数特征矩阵(w,a,f)的总数量。
[0052]
本发明中优化规则为:
[0053]
(a)加装吸振器后调相机管道允许的峰值速度为:其中,c1为调相机管道特征跨距间补偿集中质量影响的修正系数,c2为asme code定义的二次应力指数,k2为局部应力指数,c3为考虑调相机管道介质的修正系数,取1.414;c4为两端非固定端及非直管管跨的修正系数,两端固定的直跨管段取1.0,悬臂及简支梁取1.33,等臂z形弯管道取0.74,等臂u形弯结构取0.83,评估时取保守值0.7;c5为管跨测量频率与一阶固有频率不同时的修正系数,β为单位转换系数,取13.4mm/s/mpa;s
el
为疲劳应力极限,不锈钢材料为
93.7mpa,碳钢材料为48mpa;
[0054]
(b)加装吸振器后的固有频率与激振频率有10%以上的差距;本发明中加装吸振器后的固有频率其中,k
eq
为调相机管道等效弹簧刚度,m
eq
为调相机管道的等效质量,m为调相机管道的质量,通过调相机管道振动部分的管道长度l、调相机管道的厚度t求取调相机管道的体积,在通过调相机管道材料密度来求取调相机管道的质量;
[0055]
(c)吸振器的最大位移x2不超过预设吸振器配重的最大位移量l2;本发明中吸振器的最大位移
[0056]
基于上述优化规则,可以对每一套吸振器参数的减振效果、适应范围进行评价,从而布置适应度p的计算。
[0057]
采用本发明调相机管道吸振器的参数设计方法进行吸振器参数优化后,用于图1中的吸振器设计参数明显减少,只需要吸振器质量m2为0.6069kg和12.8324kg,弹簧刚度k2为8.8248e 05n/m和1.9078e 05n/m,即可满足调相机管道的减振需求。本发明通过试验方法和模态分析得到调相机管道振动状态,依据振动状态得到吸振器参数并计算振动参数特征矩阵,使得设计的吸振器能够以较少的设备同时满足多根管道、多处位置、多种振动特征的减振要求,同时满足多样化和个性化特点。
[0058]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施方式,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。