1.本技术涉及铸件毛坯后处理技术领域,尤其是一种铸件后处理流水线。
背景技术:
2.目前,铸造行业内的铸件打磨基本采用“摆地摊”形式的定点机器人实现。这种方式存在以下缺点:1.由于铸件产量大、品种多,打磨时需要固定铸件,这就需要大量的、不同规格的工装夹具,铸件及工装夹具以“摆地摊”的形式存放,会占用大量车间场地;2.现有的定点机器人打磨时,需要人工将铸件送入定点打磨工位,机器人上自带扫描系统,对铸件扫描后再进行打磨,打磨完成后机器人停止工作,等待工人送出铸件,采用这种方式在铸件出入及扫描时,机器人是无法进行打磨工作的,会浪费大量工作时间;3.一个铸件打磨需要多种磨轮,因此,需要频繁地更换机器人上的刀具,导致机器人无法连续打磨作业、影响打磨效率;4.打磨作业区域灰尘多、噪音大、火花四溅,工人作业环境差,安全系数低。
技术实现要素:
3.本技术的目的是在于克服现有技术中存在的不足,提供一种铸件后处理流水线。
4.为实现以上技术目的,本技术提供了一种铸件后处理流水线,包括:传输装置,用于输送铸件;转台,设于传输装置一侧,用于承接铸件,转台具有至少两个工作工位;检测装置,用于对工作工位处的铸件进行检测,以便于获知铸件的待打磨部位;打磨装置,用于对工作工位处的铸件进行打磨;翻转装置,设于传输装置一侧,用于对铸件进行翻转。
5.进一步地,至少两个工作工位包括检测工位和打磨工位,转台具有至少一个检测工位和至少一个打磨工位;检测装置用于对检测工位处的铸件进行检测;打磨装置用于对打磨工位处的铸件进行打磨。
6.进一步地,检测装置包括:主检测器,设于检测工位一侧、用于对检测工位处的铸件进行一次检测;副检测器,设于打磨工位一侧、用于对打磨工位处的铸件进行二次检测。
7.进一步地,转台具有两个工作工位,转台能够同时承接两个铸件,两个铸件分别处于一个工作工位上;或者,转台具有四个工作工位,其中一个工作工位为检测工位,另外三个工作工位为打磨工位,铸件后处理流水线包括一台检测装置和三台打磨装置,三台打磨装置分别用于对一个打磨工位处的铸件进行打磨;或者,转台具有六个工作工位,六个工作工位均为打磨工位,铸件后处理流水线包括六台打磨装置,六台打磨装置分别用于对一个打磨工位处的铸件进行打磨。
8.进一步地,铸件后处理流水线包括多个转台,多个转台沿传输装置的输送方向设置;任一转台对应设置有至少一台检测装置和至少一台打磨装置。
9.进一步地,转台包括:母台,可转动地设置在传输装置一侧;主驱动器,用于驱使母台旋转;至少两个子台,可转动地设置在母台上、用于承接铸件;至少两个副驱动器,任一子
台与一个副驱动器相连,副驱动器用于驱使子台旋转。
10.进一步地,转台还包括:栏板,任意两个相邻的子台之间设置有一个栏板;和/或,保护罩,设于母台上、用于保护主驱动器。
11.进一步地,翻转装置包括:摆台,用于承接铸件;提取件,吊装在摆台上方、用于获取摆台上的铸件;升降驱动组件,用于驱使提取件靠近或远离摆台;旋转驱动组件,用于驱使提取件转动。
12.进一步地,铸件后处理流水线还包括立体库,立体库设于传输装置一侧;立体库包括:货架,货架具有多层摆台,多层摆台沿竖直方向设置,任一层摆台上设有至少两个置物间,任一层摆台上的至少两个置物间沿第一方向设置,任一置物间能够放置一个铸件或者一个工装;取放机构,取放机构包括载台,载台用于承接铸件或者工装,载台能够沿竖直方向运动、以便于前往不同层的摆台,取放机构能够沿第一方向运动、以便于前往不同的置物间;其中,第一方向垂直于竖直方向。
13.进一步地,铸件后处理流水线还包括:消音室,转台、检测装置和打磨装置设于消音室中;和/或,除尘机构,用于抽除打磨产生的粉尘;和/或,转运叉车,用于接取打磨后的铸件,或者,用于接取翻转后的铸件;和/或,控制室,操作人员能够在控制室中了解铸件的处理情况。
14.本技术提供了一种铸件后处理流水线,包括传输装置、转台、检测装置、打磨装置和翻转装置;传输装置能够串联转台及翻转装置、方便地转移铸件;通过转台旋转,铸件能够依次进入各个工作工位,以便于检测装置和打磨装置配合、实现转台上的铸件的打磨;翻转装置能够翻转铸件,以便于铸件待打磨的表面暴露在方便检测装置和打磨装置处理的位置;本技术提供的铸件后处理流水线自动化程度高、工作效率高。
附图说明
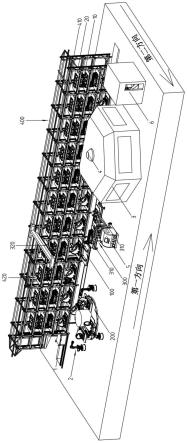
15.图1为本技术提供的一种铸件后处理流水线的结构示意图;图2为图1所示的铸件后处理流水线的俯视结构示意图;图3为图1中转台与传输装置的结构示意图;图4为本技术提供的另一种铸件后处理流水线的结构示意图;图5为本技术提供的一种铸件与工装的结构示意图;图6为图5中铸件翻转后与另一种工装的结构示意图。
具体实施方式
16.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施例的限制。
17.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必
须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
18.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
19.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
20.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可以是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
21.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
22.本技术提供了一种铸件后处理流水线,包括:传输装置100,用于输送铸件10;转台200,设于传输装置100一侧,用于承接铸件10,转台200具有至少两个工作工位;检测装置1,用于对工作工位处的铸件10进行检测,以便于获知铸件10的待打磨部位;打磨装置2,用于对工作工位处的铸件10进行打磨;翻转装置300,设于传输装置100一侧,用于对铸件10进行翻转。
23.首先,需要说明的是,为方便运输和处理铸件10,通常会将铸件10放置在工装20上,工装20既能够固定铸件10、避免铸件10位移,又能够避免铸件10与传输装置100或者其他设备摩擦。
24.为固定铸件10,工装20上设有承托部件21,承托部件21能够限定铸件10在工装20上的位置,从而保证铸件10在传输、打磨过程中具备稳定的状态、不易位移或者转动。其中,承托部件21可以是夹具,也可以是槽、框等能够限制铸件10运动的结构。
25.可选地,传输装置100输送铸件10时,铸件10处于工装20上,传输装置100通过输送工装20实现对铸件10的运输。
26.可选地,转台200承接铸件10时,铸件10处于工装20上,转台200通过接收和带动工装20旋转,实现铸件10在工作工位间的顺序流转。
27.传输装置100用于接取铸件10,并能够将铸件10输送至转台200或者翻转装置300处。传输装置100可采用机械手、吊车、传送带、机动辊道等运输机构。
28.检测装置1作用于铸件10后,能够获知铸件10的外形、轮廓、尺寸等信息、从而确定铸件10的待打磨部位,检测装置1将检测信息传递给控制系统后,控制系统能够根据检测信
息计算出铸件10所需的打磨轨迹路径、并控制打磨装置2准确地作用于铸件10的待打磨部位。检测装置1可以采用激光扫描仪等接触扫描设备,也可以采用ccd相机(电荷耦合器件charge coupled device)等影像测量仪器。
29.打磨装置2可以采用打磨机器人,例如,在机器人的工作端设置磨轮,机器人动作、带动磨轮作用于待打磨部位。打磨装置2还可以采用坐标铣床,进行各种磨铣、钻铣。
30.本技术并不限定传输装置100、检测装置1和打磨装置2的具体构型。
31.需要补充的是,由于铸件10被摆放在工装20上,一般情况下,检测装置1和打磨装置2仅能对铸件10远离工装20的表面进行处理,而难以对铸件10靠近甚至接触工装20的表面进行处理。因此,为全面打磨铸件10,需要通过一次甚至多次对铸件10进行翻转,使得铸件10未经过处理的表面远离工装20、以便于检测装置1和打磨装置2工作。
32.一具体实施例中,一个铸件10经由传输装置100运输至转台200,通过转台200旋转,铸件10从一个工作工位转移至另一个工作工位,从而完成一次检测和打磨;随后,铸件10返回传输装置100,传输装置100将铸件10运输至翻转装置300处,由翻转装置300对铸件10进行翻转,使得铸件10未经过处理的表面暴露在方便检测装置1和打磨装置2作用的位置;完成翻转后,铸件10再次返回传输装置100;若需要进行二次检测和打磨,传输装置100可将铸件10再次运输至转台200。
33.转台200能够优化检测装置1和打磨装置2的布局,并提高检测和打磨的效率。
34.具体地,转台200包括:母台210,可转动地设置在传输装置100一侧;主驱动器,用于驱使母台210旋转。其中,主驱动器可以采用伺服电机、马达等转动驱动构件;母台210可设置为圆台。母台210承接铸件10后,主驱动器驱使母台210旋转,铸件10能够顺次进入各个工作工位。
35.由于转台200具有至少两个工作工位,因此,母台210能够同时承载至少两个铸件10,其中一个铸件10在某一工作工位上进行检测或者打磨处理时,其他的铸件10能够在其他的工作工位上进行检测或者打磨处理。
36.一实施方式中,母台210旋转,使得铸件10顺次进入各个工作工位的过程中,每一工作工位能够实现铸件10打磨的一个工序。
37.例如,一个铸件10具备两个待打磨部位;此时,转台200至少具有两个工作工位,且两个工作工位处分别设有一台打磨装置2;铸件10进入第一个工作工位后,第一台打磨装置2用于对第一个待打磨部位进行打磨;完成第一次打磨后,母台210旋转,使得铸件10进入第二个工作工位,第二台打磨装置2用于对第二个待打磨部位进行打磨。一个铸件10进入第二个工作工位进行第二次打磨时,新的一个铸件10会进入第一个工作工位、由第一台打磨装置2对其进行第一次打磨。
38.由此,随着母台210旋转,铸件10顺次进入各个工作工位,各个工位处的打磨装置2配合,能够联合完成铸件10的打磨。
39.同时,由于转台200具备至少两个工作工位,每一工作工位都能承接一个铸件20、并能独立地对铸件10进行一个打磨工序,各个工位处的打磨装置2能够持续运行,进而保证打磨效率。
40.可选地,对应不同工作工位设置的打磨装置2具备不同的规格。例如,打磨装置2均采用打磨机器人时,对应不同工作工位设置的打磨机器人所使用的磨轮规格或者功能不
同;又例如,一个工作工位处设置打磨机器人、另一个工作工位处设置铣床;从而满足不同打磨部位、不同打磨效果的需要。
41.可选地,所有工作工位的功能均相同。
42.例如,每一工作工位对应设置有一台检测装置1和一台打磨装置2,此时,铸件10随着母台210旋转到达任意工作工位后,对应该工作工位设置的检测装置1和打磨装置3均会对铸件10进行一次检测和打磨处理。
43.可选地,至少部分工作工位的功能不同。
44.例如,至少两个工作工位包括检测工位a和打磨工位b,转台200具有至少一个检测工位a和至少一个打磨工位b;检测装置1用于对检测工位a处的铸件10进行检测;打磨装置2用于对打磨工位b处的铸件10进行打磨。
45.一具体实施例中,参照图4,转台200a具有一个检测工位a和一个打磨工位b,检测装置1设于检测工位a一侧,打磨装置2设于打磨工位b一侧。母台210能够同时承载两个铸件10,其中一个铸件10处于检测工位a时,另一个铸件10处于打磨工位b。
46.该实施例中,待打磨的铸件10先于检测工位a处接受检测,检测装置1对铸件10的外形、轮廓、尺寸进行精准测量,并将测量数据传输给控制系统,控制系统由此确认铸件10的待打磨部位和打磨所需的轨迹路径;母台210旋转,使得待打磨的铸件10进入打磨工位b,控制系统进一步控制打磨装置2准确地作用于待打磨部位、完成打磨。
47.通过设置检测工位a,在打磨前对铸件10进行检测,打磨装置2能够不间断地连续工作,有利于提高工作效率。
48.又例如,工作工位还包括检测工位a、打磨工位b和上下料工位,上下料工位用于对接传输装置100,能够接取传输装置100输送而来的铸件10,也能够输出打磨后的铸件10。
49.一实施例中,转台200具有一个上下料工位,传输装置100将待打磨的铸件10输入上下料工位;母台210旋转,能够将该铸件10输入检测工位a;母台210再次旋转,能够将该铸件10输入打磨工位b;母台210转过360
°
后,能够将铸件10送返回上下料工位,以便于传输装置100接取完成打磨的铸件10。
50.另一实施例中,转台200具有两个上下料工位,其中一个用于接取传输装置100输送而来的待打磨的铸件10,另一个用于将完成打磨的铸件10输出(可以输回传输装置100,也可以输入其他机构中)。
51.本技术并不限定工作工位的数量和具体功能。
52.为提高转台200的工作效率,母台210接收传输装置100输送而来的待打磨的铸件10时,该铸件10即可处于一个工作工位上。此时,铸件10甫一进入转台200,即可进行检测、打磨等处理。
53.例如,传输装置100对接检测工位a,传输装置100能够将待打磨的铸件10输送至检测工位a处的母台210上。因此,铸件10甫一进入转台200,检测装置1即可对铸件10进行检测。
54.可选地,本技术提供的铸件后处理流水线中,一个转台200仅对应设置有一台检测装置1,该检测装置1器能够对铸件10整体进行检测。
55.例如,图4所示的实施例中,转台200a均具有一个检测工位a和一个打磨工位b;检测装置1设于检测工位a一侧,待打磨的铸件10先于检测工位a处接受检测,再进入打磨工位
b。其中,检测装置1可采用高精度激光扫描仪。
56.可选地,本技术提供的铸件后处理流水线中,一个转台200对应设置有至少两台检测装置1,任一工作工位处设有一台检测装置1和一台打磨装置2。
57.此时,铸件10每到达一个工作工位,都能够对应进行一次检测和打磨,从而满足不同打磨部位、不同打磨效果、不同打磨精度、不同打磨工艺的需要。
58.可选地,本技术提供的铸件后处理流水线中,一个转台200对应设置有至少两台检测装置1,任一工作工位处设有一台打磨装置2,部分工作工位处还设有一台检测装置1。
59.此时,工作工位均为打磨工位b,铸件10每到达一个工作工位,对应的打磨装置2即可对铸件10进行相应的打磨处理。设有检测装置1工作工位还能对铸件10进行检测,以便于当前或者后续工作工位处的打磨装置2准确地作用于铸件10的待打磨部位。
60.可选地,检测装置1包括:主检测器,设于检测工位a一侧、用于对检测工位a处的铸件10进行一次检测;副检测器,设于打磨工位b一侧、用于对打磨工位b处的铸件10进行二次检测。
61.此时,主检测器用于对铸件10的外轮廓进行扫描,副检测器用于对铸件的内腔进行扫描。
62.需要补充的是,当铸件10的内部通道贯穿铸件10时,铸件10表面具有多个通道口11,每一通道口11均需要进行打磨;此时,设置主检测器,能够确定铸件10外表面的待打磨部位的数量和位置;设置副检测器,能够通过通道口11确定铸件10内部的待打磨部位的数量和位置。为此,检测装置1可包括多个副检测器,多个副检测器分别设置在一个打磨工位b处,能够通过不同的通道口确认不同的内部待打磨部位的情况。
63.其中,主检测器可以独立地设置在检测工位a一侧;副检测器既可以独立地设置在打磨工位b一侧,也可以设置在打磨装置2上。例如,打磨装置2为打磨机器人时,副检测器可以可以设置在磨轮一侧,磨轮作用于待打磨部位时,副检测器可以随磨轮接近铸件10,进而准确地对铸件10内腔进行检测。
64.同理,一个工位工位对应设有一台检测装置1和一台打磨装置2时,检测装置1可以独立地设置在工作工位一侧、也可以设置在打磨装置2上。
65.一实施方式中,转台200具有两个工作工位,转台200能够同时承接两个铸件10,两个铸件10分别处于一个工作工位上。
66.该实施方式中,每一工作工位可以对应设置有一台检测装置1和一台打磨装置2,铸件10每到达一个工作工位,即可进行一次检测和打磨。或者,两个工作工位中,其中一个为检测工位a、另一个为打磨工位b,待检测的铸件10先于检测工位a进行检测、再于打磨工位b进行打磨。
67.另一实施方式中,转台200具有四个工作工位,其中一个工作工位为检测工位a,另外三个工作工位为打磨工位b,铸件后处理流水线包括一台检测装置1和三台打磨装置2,三台打磨装置2分别用于对一个打磨工位b处的铸件10进行打磨。
68.该实施方式中,待打磨的铸件10先到达检测工位a,随后,再顺次到达各个打磨工位b。此时,转台200能够同时承接四个铸件10,其中一个铸件10处于检测工位a时,另外三个铸件10分别处于一个打磨工位b。
69.一具体实施例中,铸件10具备三个待打磨部位;传输装置100将待打磨的铸件10输
入母台210,铸件10先处于检测工位a,由检测装置1对铸件10进行检测、以获知铸件10的待打磨部位;母台210旋转,铸件10进入第一个打磨工位b;第一个待打磨部位完成打磨后,母台210再次旋转,铸件10进入第二个打磨工位b;第二个待打磨部位完成打磨后,母台210再次旋转,铸件10进入第三个打磨工位b;第三个待打磨部位完成打磨后,母台210再次旋转,铸件10返回检测工位a,此时,完成三次打磨的铸件10先被移出转台200,使得检测工位a空置,以便于新的待打磨的铸件10进入检测工位a。
70.可选地,该实施例中,三台打磨装置2的具体构型不同(如采用的磨轮规格不同);此时,三台打磨装置2不仅能够联合完成铸件10三个待打磨部位的打磨,还能够满足不同的打磨需求。
71.可选地,该实施例中,检测装置1可以仅设置在检测工位a;或者,检测装置1可以包括主检测器和副检测器,主检测器设于检测工位a一侧,副检测器设于打磨工位b一侧。
72.又一实施方式中,转台200具有六个工作工位,六个工作工位均为打磨工位b,铸件后处理流水线包括六台打磨装置2,六台打磨装置2分别用于对一个打磨工位b处的铸件10进行打磨。
73.该实施方式中,任一工作工位可对应设置一台打磨装置2和一台检测装置1,也可以仅部分工作工位设有检测装置1。
74.一具体实施例中,铸件10具备六个待打磨部位,六台打磨装置2分别用于对铸件10的一个待打磨部位进行打磨;铸件10进入转台200后,随着,母台210不断旋转,铸件10能够顺次进入六个工作工位,六台打磨装置2配合、完成六个待打磨部位的打磨。
75.其他实施方式中,转台200能够具有三个、五个甚至更多个工作工位,只要保证工作工位的数量不少于铸件10待打磨部位的数量即可。
76.可选地,本技术提供的铸件后处理流水线包括多个转台200,多个转台200沿传输装置100的运输方向设置;任一转台200对应设置有至少一个检测装置1和至少一个打磨装置2。
77.使得多个转台200沿传输装置100的运输方向设置,传输装置100能够根据需要将待打磨的铸件10输入合适的转台200中,对应该转台200设置的检测装置1和打磨装置2配合,能够高效地完成铸件10的打磨。
78.可选地,多个转台200的规格一致。
79.例如,传输装置100的一侧间隔设置有多个转台200,每一转台200均具有两个工作工位,且其中一个工作工位为检测工位a,4、另一个工作工位为打磨工位b。进一步地,检测工位a靠近传输装置100,还用于接收和输出铸件10。
80.可选地,至少部分转台200的规格不一致。
81.例如,图4所示的实施例中,传输装置100的一侧间隔设置有三个转台200,其中一个转台200a具有两个工作工位,另一个转台200b具有四个工作工位,还有一个转台200c具有六个工作工位。
82.设置不同规格的转台200,以便于对不同样式的铸件10进行打磨。实际使用时,传输装置100能够根据铸件10待打磨部位的数量选择合适的转台200进行输送。
83.由于转台200包括母台210和主驱动器,母台210能够在主驱动器的驱使下旋转;为避免铸件10进入母台210后、相对母台210位移,可选地,转台200还包括固定机构,固定机构
设于母台210上、用于限定工装20的位置,从而防止铸件10向各工作工位运动时在母台210上移动。
84.其中,固定机构可以是夹具,能够夹紧工装20;固定机构也可以是挡板构成的卡槽,能够卡住工装20。本技术并不限定固定机构的具体构型,只要能够将工装20固定在预设位置处、从而保证工装20上的铸件10具备统一且稳定的位置即可。
85.可选地,转台200还包括至少两个子台220,子台220可转动地设置在母台210上、用于承接铸件10;至少两个副驱动器,任一子台220与一个副驱动器相连,副驱动器用于驱使子台220旋转。
86.此时,母台210旋转,能够使得子台220公转,使得子台220能够在至少两个工作工位间循环流转;同时,通过副驱动器的驱动,子台220还能够进行自转,子台220到达一个工作工位后,母台210停止旋转、使得子台220停留在工作工位处、以便于检测装置1或者打磨装置2作用于子台220上的铸件10;由于铸件10是立体构型,检测或者打磨过程中,副驱动器能够驱使子台220进行360
°
的原地旋转,以便于检测装置1或者打磨装置2更好地作用于铸件10。
87.其中,主驱动器和副驱动器均可以采用伺服电机、马达等转动驱动构件。
88.一具体实施例中,参照图4,转台200b具有一个检测工位a和三个打磨工位b,检测工位a靠近传输装置100、能够接收待打磨的铸件10、还能够输出完成打磨的铸件10。检测工位a的外侧设置有一台检测装置1,三个打磨工位b的外侧分别设置有一台打磨装置2;待打磨的铸件10首先进入检测工位a,检测装置1可以采用高精度激光扫描仪;处于检测工位a的子台220旋转,子台220上的铸件10经过360
°
旋转,检测装置1能够对铸件10进行全面的精准测量;检测装置1能够将测量数据传输给控制系统,控制系统根据测量数据,能够计算出铸件10各待打磨部位的打磨轨迹路径;母台210进行第一次旋转,完成扫描的铸件10进入第一个打磨工位b,控制系统根据第一个打磨轨迹路径控制第一个打磨装置2对第一个待打磨部位进行打磨,打磨过程中,子台220能够进行旋转,以便于第一个打磨装置2准确地作用于第一个待打磨部位;母台210进行第二次旋转,完成一次打磨的铸件10进入第二个打磨工位b,控制系统根据第二个打磨轨迹路径控制第二个打磨装置2对第二个待打磨部位进行打磨,打磨过程中,子台220能够进行旋转,以便于第二个打磨装置2准确地作用于第二个待打磨部位;母台210进行第三次旋转,完成两次打磨的铸件10进入第三个打磨工位b,控制系统根据第三个打磨轨迹路径控制第三个打磨装置2对第三个待打磨部位进行打磨,打磨过程中,子台220能够进行旋转,以便于第三个打磨装置2准确地作用于第三个待打磨部位;母台210进行第四次旋转,完成三次打磨的铸件10回到检测工位a,并能够通过检测工位a返回传输装置100;检测工位a空置后,传输装置100能够将另一个新的待打磨铸件10输入检测工位a。
89.综上,利用母台210的循环流转,多台打磨装置2能够流水线化联合完成铸件10的打磨。
90.可选地,转台200还包括栏板211,任意两个相邻的子台220之间设置有一个栏板211。
91.具体可参照图4,图示实施例中,转台200c的母台210上设有六个子台220和六个栏板211,一个子台220设于两个栏板211之间。栏板211能够起到限定子台220、工装20和铸件1的作用,还能够避免打磨产生的火星、粉尘等飞溅,有利于打磨安全。
92.可选地,转台200还包括保护罩212,设于母台210上、用于保护主驱动器。
93.具体可参照图1至图3,图示实施例中,母台210为圆台,主驱动器设于母台210的圆心处、并设于四个子台220之间。设置保护罩212罩住主驱动器,能够保护主驱动器、避免主驱动器暴露在外受到损害,还能够避免打磨产生的火星、粉尘等危害主驱动器。
94.为方便翻转铸件,翻转装置300包括摆台310,摆台310设于传输装置100一侧、用于接收工装1。
95.当铸件10较小时,可以由人工翻转铸件10。具体地,待翻转的铸件10经由传输装置100输送、被置入摆台310后,操作人员对摆台310上的铸件10进行翻转。
96.仅靠人工难以翻转铸件10时,翻转装置300还可以包括:提取件320,吊装在摆台310上方、用于获取摆台310上的铸件10;升降驱动组件,用于驱使提取件320靠近或远离摆台310;旋转驱动组件,用于驱使提取件320转动。
97.其中,提取件320可采用齿爪、抱具等能够获取铸件10的装置;升降驱动组件可采用电缸、吊绳等能够实现提取件320沿竖直方向运动的驱动装置;旋转驱动组件可采用电机、马达等能够实现提取件320旋转的驱动装置。
98.具体地,待翻转的铸件10经由传输装置100输送、被置入摆台310后,升降驱动组件驱使提取件320下降、靠近铸件10;提取件320获取铸件10后,升降驱动组件再驱使提取件320上升、使得铸件10远离工装20和摆台310;具备旋转空间后,旋转驱动组件驱使提取件320旋转、从而翻转铸件10;完成翻转后,升降驱动组件再次驱使提取件320下降、将铸件10放回摆台310;通过翻转,铸件10未经过打磨的表面能够暴露在方便检测装置1和打磨装置2处理的位置。
99.进一步地,对不规格的铸件10而言,经过翻转后,铸件10靠近工装1 的表面的结构会变化,也就是说,翻转后的铸件10用于接触工装10的部位的形状会不同。
100.为此,一些实施方式中,具体可参照图5和图6,待翻转的铸件10由一种工装20进行承托,而完成翻转后的铸件2由另一种工装20进行承托;两种工装20的承托部件21不同,能够针对性地对铸件10形状不同的部位进行承接和固定,以确保铸件10稳定地处于工装20上。
101.为方便置换工装20,可选地,翻转装置300具有接取工位c和置换工位d;翻转装置300包括两个摆台310,两个摆台310分别设于接取工位c和置换工位d处。两个摆台310分别能够承托一种工装20。
102.一具体实施例中,待翻转的铸件10经由传输装置100输送、被置入接取工位c处的摆台310;与此同时,通过人工或者机械搬运将另一种工装20置于置换工位d处的摆台310上;翻转铸件10后,将铸件10放置到置换工位d处的另一种工装20上。
103.为方便贮存、取放铸件10和工装20,可选地,本技术提供的铸件后处理流水线还包括立体库400,立体库400设于传输装置100一侧;立体库400包括:货架410,货架410具有多层摆台,多层摆台沿竖直方向设置,任一层摆台上设有至少两个置物间,任一层摆台上的至少两个置物间沿第一方向设置,任一置物间能够放置一个铸件10或者一个工装20;取放机构420,取放机构420包括载台,载台用于承接铸件10或者工装20,载台能够沿竖直方向运动、以便于前往不同层的摆台,取放机构420能够沿第一方向运动、以便于前往不同的置物间;其中,第一方向垂直于竖直方向。
104.其中,第一方向为传输装置100的运动方向,传输装置100能够沿第一方向往复运动,以输送铸件10和/或工装20。
105.具体可参照图1和图2,图示实施例中,立体库400和转台200分设在传输装置100两侧,立体库400既能够贮存待打磨的铸件10、又能够贮存完成打磨的铸件10、还能够贮存翻转后的铸件10;除此之外,立体库400还可贮存空置的工装20,以及其他铸件10后处理所需的物件。
106.通过设置立体库400具备多层摆台和多个置物间,既能够高效利用场地空间、贮存大量所需物件,又能够分层、分区对物件进行分类,以便于物件的取放。
107.一具体实施例中,传输装置100需要向转台200输送一种铸件10时,控制系统将对应的指令发送给立体库400,取放机构420能够前往对应的摆台和置物间、从中取出铸件10,随后,取放机构420能够将铸件10传递给传输装置100,再由传输装置100将铸件10输送给转台200。
108.立体库400能够自动完成铸件10及工装20的出入库,实现生产线高效、智能化的物料转运,提高了生产效率、节省了车间场地。
109.可选地,取放机构420还包括:取放升降驱动组件,用于驱使载台沿竖直方向运动;取放平移驱动组件,用于驱使载台沿第一方向运动。通过取放升降驱动组件和取放平移驱动组件的配合,载台能够前往各层摆台和各个置物间,以便于提取或者置入铸件10或者工装20。
110.可选地,载台上设有剁叉,剁叉能够沿第二方向运动,竖直方向、第一方向和第二方向两两垂直。剁叉能够伸入置物间、以接取或者置入工装20。
111.当立体库400和转台200分设在传输装置100两侧时,为方便传输装置100配合立体库400和转台200工作,传输装置100包括双向剁叉130。
112.具体可参照图1和图2,图示实施例中,立体库400和转台200沿第二方向相对设置;沿第二方向,立体库400设于传输装置100一侧、转台200设于传输装置100另一侧。双向剁叉130能够沿第二方向运动。传输装置100配合立体库400工作时,双向剁叉130能够朝向立体库400伸出;传输装置100配合转台200工作时,双向剁叉130能够朝向转台200伸出。
113.一具体实施方式中,传输装置100包括:导轨110,沿第一方向延伸设置;轨道车120,滑动设置在导轨110上、能够沿导轨110往复运动;双向剁叉130,设于轨道车120上、用于接取铸件10或者工装20,双向剁叉130能够沿第二方向运动。具体地,双向剁叉130接取到铸件10或者工装20后,轨道车120能够沿着导轨110向转台200、翻转装置300或者立体库400移动,从而实现铸件10和工装20的转移。
114.通过具有沿第一方向平移及具有沿第二方向双向剁叉功能的传输装置100,能够串联立体库400、转台200及翻转装置300,实现生产线最短路径物料转运、提高了生产效率。
115.可选地,本技术提供的铸件后处理流水线还包括消音室3,转台200、检测装置1和打磨装置2设于消音室3中。
116.其中,消音室3可采用封闭罩结构形式,消音室3的内壁可采用冲孔板,用于消音;进一步地,消音室3的侧壁上可设置双层隔音玻璃窗,消音的同时还便于人工观察。
117.可选地,本技术提供的铸件后处理流水线还包括除尘机构4,用于抽除打磨产生的粉尘。
118.其中,除尘机构4可以正对打磨工位b设置。例如,除尘机构4包括除尘罩,除尘罩连通抽气设备;打磨铸件10时,除尘罩正对铸件10,能够抽出打磨产生的灰尘、火星、烟气等。
119.当本技术提供的铸件后处理流水线包括消音室3和除尘机构4时,除尘机构4能够连通消音室3。具体可参照图1和图2,图示实施例中,除尘机构4设置在转台200上方、并与转台200同中心,用于捕捉铸件打磨过程中的灰尘、火星、烟气等。
120.可选地,本技术提供的铸件后处理流水线还包括转运叉车5,用于接取完成打磨的铸件10,或者,用于接取翻转后的铸件10。
121.其中,转运叉车5能够对接传输装置100;传输装置100接取到铸件10后,转运叉车5能够从传输装置100上取走铸件10。或者,转运叉车5能够对接翻转装置300;翻转装置300接取到传输装置100输送而来的铸件10后,转运叉车5能够从翻转装置300上取走铸件10。又或者,转运叉车5能够对接转台200。本技术并不限定转运叉车5的具体使用环境。
122.需要注意的是,转运叉车5能够直接接取铸件10,而不需要通过工装20承载铸件10。
123.可选地,本技术提供的铸件后处理流水线还包括控制室6,操作人员能够在控制室6中确认铸件10的处理情况。
124.具体地,控制室6中设置有操控台或者控制面板,在铸件10运输、打磨、翻转、进出库的过程中,操作人员通过操控台或者控制面板能够及时了解工作情况、还能够在需要时进行人工干预。
125.以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。