1.本实用新型涉及医疗仪器技术领域,具体涉及一种便携式眼科斜视度检测装置。
背景技术:
2.斜视是指双眼任何一眼视轴偏离的临床现象。斜视是眼科临床上十分常见的眼病之一,斜视患者双眼不能够同时注视同一个物体;斜视患者通常还有双眼眼位不对称、阅读障碍、立体感差、不能够准确的判断物体的位置和距离等严重问题,严重影响患者外观及双眼视功能的正常建立,因而及时正确的治疗十分必要。除正确的配镜外,斜视矫正术作为治疗大部分斜视的有效手段,至今已积累相当丰富的临床经验。为取得满意的临床效果,首先需要术前准确测量斜视度,斜视度的测量是进行斜视手术前最重要的环节。
3.目前斜视度的测定主要有角膜映光法、三棱镜检查法、马氏杆加三棱镜检查法等。目前这些方法基本上都是医生手持三棱镜,有时甚至还需要在病人的帮助下配合持镜才能完成,具有准确率低、测试结果的准确度受到操作水平影响较大以及医生检测时手拿检测器件过多而影响检测等缺点。因此设计一款斜视度检测装置代替医生手持检测镜片的操作,可以在解放医生双手的同时减少主观因素对斜视度测定精度的影响以及减少无效时间的消耗,具有重要的临床治疗意义。
技术实现要素:
4.针对现有斜视度检测过程中存在的缺陷,本实用新型提出一种便携式眼科斜视度检测装置,其能够有效减少医生操作的不便性,同时提高了斜视度的检测精度。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种便携式眼科斜视度检测装置,包括支撑整体装置的基座模组,实现斜视角度检测的光学模组,调整不同斜视角度、斜视种类的转动模组、定位模组;
7.所述定位模组包括定位弹簧、定位推头、光学模组定位孔、前盘定位孔、后盘定位孔、光学模组定位弹簧安装孔、前盘定位弹簧安装孔和后盘定位弹簧安装孔。
8.所述光学模组包括光学镜片和塑料镜框,光学镜片和塑料镜框通过粘接固连为一个整体,通过拨动塑料镜框实现光学镜片的旋转运动,再通过定位模组将光学镜片自身夹角的朝向进行固定。
9.所述转动模组包括前盘旋钮、后盘旋钮、前盘、后盘、光学模组和镜片限位块,前盘的旋转运动通过前盘旋钮与前盘的成形连接被前盘旋钮所控制,前盘通过定位弹簧、定位推头、前盘定位孔、前盘定位弹簧安装孔实现周向定位,后盘的旋转运动通过后盘旋钮与后盘的成形连接被后盘旋钮所控制,后盘通过定位弹簧、定位推头、后盘定位孔、后盘定位弹簧安装孔实现周向定位,光学模组的旋转运动通过拨动塑料镜框外沿进行控制,光学模组通过定位弹簧、定位推头、光学模组定位孔、光学模组定位弹簧安装孔实现周向定位。
10.所述基座模组包括支撑机架、前盘限制块与后盘限制块,三者对前盘、后盘实现了运动范围的固定。
11.优选的,所述光学镜片整体形状近似于圆柱体,其下平面水平,上平面与下平面之间呈现一定夹角,不同的光学镜片其上下平面夹角不同,且不同的夹角大小对应不同的斜视度。
12.优选的,所述光学镜片与塑料镜框进行固连,通过对塑料镜框施加旋转运动进而带动光学镜片进行旋转。
13.优选的,所述光学镜片上下平面夹角的朝向决定进行检测的斜视种类,通过定位模组对塑料镜框的固定确定光学镜片上下平面夹角的朝向,从而选择斜视检测的种类
14.优选的,所述光学模组通过镜片限位块安装于前盘和后盘之内,各光学模组的运动互相独立,光学模组内光学镜片的选择由前盘和后盘的旋转定位进行控制。
15.优选的,所述前盘内光学镜片的下平面朝向后盘,后盘内光学镜片的下平面朝向前盘,处于前盘和后盘内的两光学镜片的下平面各自平行于前盘和后盘之间的中间面,两光学镜片之间构成微小的平行缝隙,从而通过前后圆盘内光学镜片的组合来检测所有斜视度。
16.优选的,所述前盘内的光学镜片总计10片,对应的斜视度为0-4.5度,所述后盘内的光学镜片总计10片,对应的斜视度为0-45度。通过前后圆盘的光学镜片组合实现斜视度为0-49.5度的检测范围和0.5度的检测精度。
17.优选的,所述前盘的旋转运动经前盘旋钮与前盘之间的成形连接由前盘旋钮带动。
18.优选的,所述后盘的旋转运动经后盘旋钮与后盘之间的成形连接由后盘旋钮带动。
19.优选的,所述后盘旋钮与后盘之间的成形连接穿过前盘,后盘旋钮位于前盘旋钮之前,通过装置前方的前盘旋钮和后盘旋钮分别控制前盘和后盘。
20.本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术实施例而了解。本技术的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
21.本实用新型的有益效果是:
22.1.此便携式眼科斜视度检测装置,由多个独立化模组构成,组装便捷、配合可靠,当个别模组需要更换时,不会影响到其它模组;
23.2.此便携式眼科斜视度检测装置,采用的光学镜片近似于圆柱体,光学镜片的上下平面呈现一定夹角,不同的光学镜片其上下平面夹角不同,且不同的夹角大小对应不同的斜视度。光学镜片在与原有三棱镜具有相同检测效果的同时减小了光学镜片的体积;
24.3.此便携式眼科斜视度检测装置,光学镜片的旋转由与光学镜片固连的塑料镜框带动,在进行斜视度的检测过程中不会发生误触碰光学镜片的情况,避免光学镜片受到污染。
25.4.此便携式眼科斜视度检测装置,通过改变光学镜片上下平面夹角的朝向分别实现上斜、下斜、左斜、右斜四种斜视的斜视度检测;
26.5.此便携式眼科斜视度检测装置,安装于前盘和后盘内的光学镜片各自独立,各光学镜片的运动互不影响,代表不同斜视度的光学镜片通过前盘和后盘的旋转运动进行选择;
27.6.此便携式眼科斜视度检测装置,安装于前盘内的光学镜片与安装于后盘的光学镜片在前盘和后盘之间的中间面处构成微小的平行缝隙,该平行缝隙的存在既让前盘与后盘的旋转运动不存在干涉,又让装置检测的斜视度等于前盘光学镜片代表的斜视度加上后盘光学镜片代表的斜视度;
28.7.此便携式眼科斜视度检测装置,通过前盘内代表0-4.5度斜视度的10 片光学镜片和后盘内代表的0-45度斜视度的10片镜片互相组合实现斜视度为 0-49.5度的检测范围和0.5度的检测精度;
29.8.此便携式眼科斜视度检测装置,前盘的旋转运动由前盘旋钮独立控制;
30.9.此便携式眼科斜视度检测装置,后盘的旋转运动由后盘旋钮独立控制;
31.10.此便携式眼科斜视度检测装置,前盘旋钮和后盘旋钮都位于装置前方,便于对前盘和后盘进行操作。
附图说明
32.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
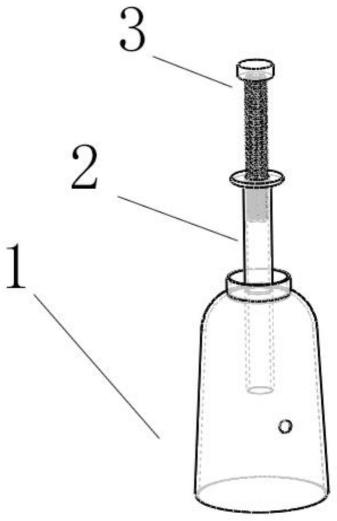
33.图1为手动斜视度数检测装置整体结构示意图;
34.图2为光学模组结构示意图;
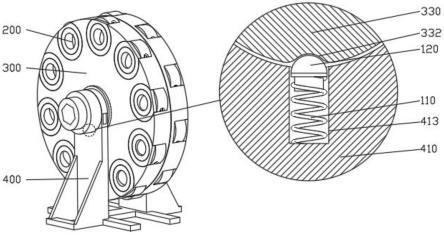
35.图3为转动模组结构示意图;
36.图4为基座模组结构示意图;
37.图标:
38.100、定位模组,110、定位弹簧,120、定位推头;
39.200、光学模组,210、光学镜片,220、塑料镜框,221、塑料镜框外沿, 222、光学模组定位孔;
40.300、转动模组,310、前盘旋钮,320、后盘旋钮,330、前盘,331、前盘支撑定位台阶,332、前盘定位孔,340、后盘,341、后盘支撑定位台阶,342、后盘定位孔,343、光学模组定位弹簧安装孔,350、镜片限位块;
41.400、基座模组,410、支撑机架,411、支撑机架前支撑座,412、支撑机架后支撑座,413、前盘定位弹簧安装孔,414、后盘定位弹簧安装孔,420、前盘限制块,430、后盘限制块。
具体实施方式
42.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
43.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都
属于本实用新型保护的范围。
44.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
45.在本实用新型的描述中,需要说明的是,若出现术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
46.此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
47.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述:
48.实施例1:
49.一种便携式眼科斜视度检测装置,如图1所示,由定位模组100、光学模组 200、转动模组300和基座模组400构成。
50.在本实施例中,定位模组100由定位弹簧110、定位推头120、光学模组定位孔222、前盘定位孔332、后盘定位孔342、光学模组定位弹簧安装孔343、前盘定位弹簧安装孔413、后盘定位弹簧安装孔414组成。光学模组200由光学镜片210和塑料镜框220固连组成。转动模组300由前盘旋钮310、后盘旋钮 320、前盘330、后盘340、光学模组200和镜片限位块350组成。基座模组400 由支撑机架410、前盘限制块420和后盘限制块430组成。
51.在本实施例中,转动模组300经前盘支撑定位台阶331、后盘支撑定位台阶 341、支撑机架前支撑座411、支撑机架后支撑座412、前盘限制器420和后盘限制器430实现前盘330和后盘340的旋转运动,前盘330的旋转力矩由前盘旋钮310通过前盘旋钮310和前盘330的成形连接进行传递,后盘340的旋转力矩由后盘旋钮320通过后盘旋钮320和后盘340的成形连接进行传递。转动模组300经光学模组200、前盘330、后盘340和镜片限位块350实现光学模组 200的旋转运动,光学模组200通过手动拨动光学模组200凸出前盘330和后盘 340的塑料镜框外沿221实现光学模组200的旋转运动。前盘330通过定位弹簧 110、定位推头120、前盘定位孔332、前盘定位弹簧安装孔413实现周向定位;后盘340通过定位弹簧110、定位推头120、后盘定位孔342、后盘定位弹簧安装孔414实现周向定位;光学模组200通过定位弹簧110、定位推头120、光学模组定位孔222、光学模组定位弹簧安装孔343实现周向定位。
52.实施例2:
53.在本实施例中,光学镜片210近似于圆柱体,其上下平面之间所呈现夹角的不同代表不同的斜视度,通过更换光学镜片210实现各种斜视度的精确检测。光学镜片210上下平面夹角的朝向决定了进行检测的斜视种类,通过定位模组 100对塑料镜框220的固定确定光学镜片210上下平面夹角的朝向,进而实现不同斜视种类的斜视度检测。
54.实施例3:
55.在本实施例中,光学模组200通过镜片限位块350安装于前盘330和后盘 340之内,各光学模组200的运动互相独立,光学模组200内光学镜片210的选择由前盘330和后盘340的旋转定位进行控制。
56.实施例4:
57.在本实施例中,前盘330内光学镜片210的下平面朝向后盘340,后盘340 内光学镜片210的下平面朝向前盘330,处于前盘330和后盘340内的两光学镜片210的下平面各自平行于前盘330和后盘340之间的中间面,两光学镜片210 之间构成微小的平行缝隙,从而通过前盘330和后盘340两圆盘内光学镜片210 的组合来检测所有斜视度。
58.实施例5:
59.在本实施例中,前盘330内的光学镜片210总计10片,对应的斜视度为0-4.5 度,所述后盘340内的光学镜片210总计10片,对应的斜视度为0-45度。通过前盘330和后盘340两圆盘的光学镜片210组合实现斜视度为0-49.5度的检测范围和0.5度的检测精度。
60.实施例6:
61.在本实施例中,后盘旋钮320与后盘340之间的成形连接穿过前盘330,后盘旋钮320位于前盘旋钮之310前,通过装置前方的前盘旋钮310和后盘旋钮 320分别控制前盘330和后盘340。
62.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。