1.本发明涉及按摩机。
背景技术:
2.以往,已知有对被施疗者进行施疗的按摩机。在这样的按摩机中,设有检测被施疗者的肩的位置等的各种检测部。
3.例如,在下述专利文献1中,公开了具有检测左右的施疗件的突进量的左侧检测部及右侧检测部的按摩机。在该按摩机中,已知向构成使左右的施疗件进退的进退机构的气室供给相同量的空气,通过比较抵接于被施疗者的身体上的状态的左侧施疗件的突进量和右侧施疗件的突进量,能够知道左右的歪斜。
4.现有技术文献
5.专利文献
6.专利文献1:日本特许第6499820号公报
技术实现要素:
7.发明要解决的课题
8.但是,在上述专利文献1所记载的按摩机中,构成为,在通过气室使左右两方的施疗件突进的状态下使其与身体抵接来检测左右各自的突进量。即,由于通过突进状态的左右的施疗件推压身体,所以在左右有歪斜的情况下,担心由突进状态的一方的施疗件向歪斜变小的方向推压。
9.本发明是鉴于上述情况而做出的,目的是提供一种能够提高被施疗者的左右的歪斜等的身体信息的检测精度的按摩机。
10.用来解决课题的手段
11.为了达成上述目的,有关本发明的按摩机具备:施疗部,具有左侧施疗件及右侧施疗件,能够沿着身体长度方向移动;左侧身体信息检测部及右侧身体信息检测部,各自设于上述左侧施疗件及上述右侧施疗件,能够各自单独地检测被施疗者的左侧身体信息及右侧身体信息;以及控制部,执行在由上述左侧身体信息检测部及上述右侧身体信息检测部中的一方检测到上述左侧身体信息及上述右侧身体信息中的一方之后、由上述左侧身体信息检测部及上述右侧身体信息检测部中的另一方检测上述左侧身体信息及上述右侧身体信息中的另一方的身体信息检测模式。
12.发明效果
13.有关本发明的按摩机通过为上述那样的构成,能够使被施疗者的左右的歪斜等的身体信息的检测精度提高。
附图说明
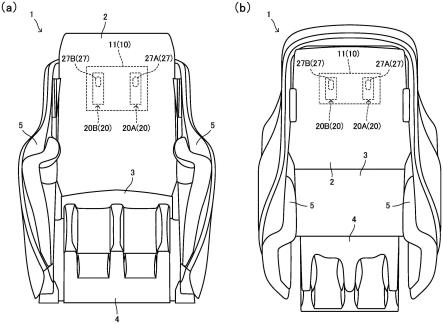
14.图1的(a)、图1的(b)示意地表示有关本发明的一实施方式的按摩机的一例,图1的
(a)是概略正视图,图1的(b)是概略俯视图。
15.图2的(a)、图2的(b)是该按摩机的部分省略概略侧视图。
16.图3的(a)~图3的(d)是示意地表示该按摩机具备的施疗件的一例的概略侧视图。
17.图4是该按摩机的概略控制框图。
18.图5的(a)、图5的(b)是示意地表示在该按摩机中执行的身体信息检测模式的一例的概略流程图。
19.图6的(a)、图6的(b)是该按摩机的部分省略概略侧视图,图6的(c)、图6的(d)是该按摩机的部分省略概略俯视图。
20.图7的(a)、图7的(b)是示意地表示在该按摩机中执行的身体信息检测模式的一例的概略流程图。
21.图8的(a)、图8的(b)是该按摩机的一部分省略概略侧视图,图8的(c)、图8的(d)是该按摩机的部分省略概略俯视图。
22.图9的(a)~图9的(i)是通过该身体信息检测模式的执行而检测到的身体信息的一例的说明图。
23.图10的(a)~图10的(f)是通过该身体信息检测模式的执行而检测到的身体信息的一例的说明图。
具体实施方式
24.以下,一边参照附图一边对本发明的实施方式进行说明。
25.在一部分的图中,将对其他图中带有的详细的标号的一部分省略。
26.在以下的实施方式中,以就座于靠背起立状态的按摩机的被施疗者为基准,说明前后方向、左右方向及上下方向。
27.图1~图10是有关本实施方式的按摩机的一例,是示意地表示在该按摩机中执行的身体信息检测模式的一例及通过该身体信息检测模式的执行而检测到的身体信息的一例的图。
28.有关本实施方式的按摩机1如图1的(a)、图1的(b)所示,是具备支承被施疗者的后背的靠背部2和被施疗者就座的座部3的椅型的按摩机。该按摩机1具备支承被施疗者的腿的载腿部(脚架)4,和以立起的方式设在座部3的左右两侧、支承被施疗者的手臂的扶手部5、5。该按摩机1详细情况后述,具备施疗单元10,所述施疗单元10具有左侧施疗件27a及右侧施疗件27b,构成能够沿着身体长度方向移动的施疗部。
29.靠背部2通过靠背驱动部6(参照图4)而起倒(俯仰)自如。该靠背部2既可以以座部3侧的下端部为支点相对于座部3转动自如,或者也可以构成为与座部3一起摆动(锁定)。作为靠背驱动部6,也可以是具有与靠背部2连结、通过适当的马达而伸缩的杆的电动致动器。在按摩机1中,也可以设有为了对靠背驱动部6进行控制而检测靠背部2的倾斜角度的适当的倾斜角度检测部、或在起立极限及倒伏极限使靠背驱动部6停止的适当的停止机构等。
30.也可以在该靠背部2或座部3的不与后述的施疗单元10干涉的适当的位置,设置对被施疗者的后背或腰、臀部等施疗的气室。也可以在该靠背部2的左右两侧设置对被施疗者的左右的肩进行约束或施疗的气室。
31.在载腿部4,设有分别接纳被施疗者的左右的腿的腿承接槽。该载腿部4通过载腿
驱动部7(参照图4)而倾斜运动自如。该载腿部4也可以以座部3侧的上端部为支点相对于座部3转动自如。作为载腿驱动部7,也可以与上述同样,是具有与载腿部4连结、通过适当的马达而伸缩的杆的电动致动器。在按摩机1中,设有为了对载腿驱动部7进行控制而检测载腿部4的倾斜角度的适当的倾斜角度检测部、在倾动上限及倾动下限使载腿驱动部7停止的适当的停止机构等。载腿部4也可以沿着被施疗者的腿长度方向伸缩自如或升降自如。
32.在该载腿部4中,也可以设有对被接纳在腿承接槽中的腿进行施疗的气室及滚轮等的适当的施疗机构。
33.左右的扶手部5、5在座部3侧到靠背部2侧之间设置,以便能够进行被施疗者的手指、前臂及上臂的支承。也可以在这些左右的扶手部5、5设置分别接纳被施疗者的左右的手臂的手臂承接槽。也可以设有对被接纳在这些左右的扶手部5、5的手臂承接槽中的手臂进行施疗的气室或滚轮等的适当的施疗机构。
34.在按摩机1中,设有对向上述的各气室的空气的供给及从各气室的空气的排出进行控制的供排气部8(参照图4)。作为供排气部8,也可以是将连接各气室和泵等的空气源的空气管路开闭的电磁阀等。
35.左侧施疗件27a及右侧施疗件27b在本实施方式中设在一个施疗单元10中。如果为这样的结构,则与设置能够使左侧施疗件27a及右侧施疗件27b各自单独地沿着身体长度方向移动的左右一对施疗部那样的结构相比,能够实现装置构成的简单化。
36.该施疗单元10如图2的(a)所示,能够沿着导轨9在按摩机1内移动,所述导轨9沿着身体长度方向被形成为长尺寸状。该导轨9在图例中简单化表示,沿着身体的背面形状被做成适当的形状。该导轨9在图例中表示了跨靠背部2的上下方向的大致整体及座部3的前后方向的大致整体以连续状设置的例子,但也可以仅设在靠背部2。该导轨9如图6的(c)所示,在左右隔开间隔的位置以对状设置,以导引施疗单元10的左右两端部。在这些左右的导轨9,设有对设在施疗单元10的左右两端部的滚轮或销等的被导引部进行导引的导引槽及对设在施疗单元10的左右两端部的小齿轮进行啮合的齿条等。
37.在施疗单元10的左右两端部,设有被沿着上述的左右的导轨9的导引槽导引的被导引部。在施疗单元10的左右两端部,被导引部也可以在身体长度方向上隔开间隔设在两处。在施疗单元10的左右两端部,设有与左右的导轨9的齿条啮合的小齿轮。左右两侧的小齿轮也可以相对于身体长度方向一方的被导引部以同轴状被设置。
38.在施疗单元10中,设有使左右两侧的小齿轮旋转的主体升降驱动部12(参照图4)。该主体升降驱动部12由适当的马达构成,经由适当的减速机使左右两侧的小齿轮轴旋转。即,如果主体升降驱动部12进行驱动,则施疗单元10的左右两侧的小齿轮旋转,沿着其啮合的左右的导轨9的齿条,施疗单元10在身体长度方向上移动。在按摩机1中,设有检测被主体升降驱动部12移动的施疗单元10的升降位置的主体升降位置检测部13(参照图4)。作为主体升降位置检测部13,既可以是检测通过主体升降驱动部12旋转的旋转体的转速的旋转编码器,或者也可以是检测设在施疗单元10及导轨9中的一方的被检测部的适当的传感器。
39.在施疗单元10中,设有当使设有后述的左右的施疗件27a、27b的施疗部主体11相对于导轨9在前后方向上进退时进行驱动的主体进退驱动部14(参照图4)。
40.施疗部主体11例如如图2的(b)所示,也可以相对于施疗单元10的主体保持部摆动自如,以使其上端侧以下端侧为支点在大致前后方向上变位,大致前后方向是相对于导轨9
的长度方向大致正交的方向。作为这样的主体进退机构,也可以构成为,在主体保持部及施疗部主体11中的一方设有经由适当的减速机与构成主体进退驱动部14的马达连结的小齿轮,在另一方设有大致在前后方向上延伸而小齿轮啮合的圆弧状齿条。即,如果主体进退驱动部14进行驱动,则小齿轮旋转,沿着其啮合的圆弧状齿条,施疗部主体11的上端侧与左右的施疗件27a、27b一起大致在前后方向上进退。作为主体进退机构,并不限于上述那样的结构,也可以构成为使施疗部主体11相对于导轨9直线运动地进退,除此以外也可以为其他各种结构。在按摩机1中,设有检测通过主体进退驱动部14被移动的施疗部主体11的进退位置的主体进退位置检测部15(参照图4)。作为主体进退位置检测部15,也可以是与上述的主体升降位置检测部13同样的机构。
41.在施疗单元10中,设有当使设在施疗部主体11的左右的施疗件27a、27b在左右方向(宽度方向)上移动时进行驱动的施疗件宽度驱动部16(参照图4)。在施疗部主体11,也可以设置将具有左侧施疗件27a的左侧施疗件单元20a及具有右侧施疗件27b的右侧施疗件单元20b(参照图1)在左右方向上移动自如地导引的导引轴,或设置经由适当的减速机与构成施疗件宽度驱动部16的马达连结、与设在左侧施疗件单元20a及右侧施疗件单元20b的阴螺纹部螺合并使它们向相互接近侧或相互远离侧变位的螺纹轴等。也可以在施疗单元10设置检测左侧施疗件单元20a及右侧施疗件单元20b的左右位置的适当的检测部。
42.在施疗单元10中,设有在使左侧施疗件单元20a及右侧施疗件单元20b揉按动作时进行驱动的揉按驱动部17(参照图4)。在施疗部主体11,也可以设置经由适当的减速机与构成揉按驱动部17的马达连结、使左侧施疗件单元20a及右侧施疗件单元20b以圆弧状变位的适当的偏心转子或揉按轴等。
43.在施疗单元10中,设有在使左侧施疗件单元20a及右侧施疗件单元20b敲打动作时进行驱动的敲打驱动部18(参照图4)。在施疗部主体11上,也可以设置经由适当的减速机与构成敲打驱动部18的马达连结、使左侧施疗件单元20a及右侧施疗件单元20b在作为导轨9的长度方向的大致上下变位的适当的曲柄机构或偏心转子、敲打轴等。
44.在施疗单元10中,在本实施方式中,设有能够使左侧施疗件27a及右侧施疗件27b分别单独地进退的进退机构23。关于该进退机构23的具体的构成的一例在后面叙述。
45.构成上述的各驱动部6、7、12、14、16、17、18的马达及构成后述的进退机构23的马达24也可以是能够正反旋转、能够进行转速的控制的伺服马达等。
46.也可以不设置施疗件宽度驱动部16、揉按驱动部17及敲打驱动部18的全部。例如,也可以不设置揉按驱动部17,而能够由施疗件宽度驱动部16及主体升降驱动部12或后述的进退机构23进行揉按动作。
47.关于上述那样的按摩机1的基本构成,可以采用其他各种周知的构成。
48.按摩机1具备各自设在左侧施疗件27a及右侧施疗件27b并能够单独地检测被施疗者的左侧身体信息及右侧身体信息的左侧身体信息检测部29a及右侧身体信息检测部29b(参照图4)。按摩机1具备执行身体信息检测模式的控制部30(参照图4),在所述身体信息检测模式下,在由这些左侧身体信息检测部29a及右侧身体信息检测部29b中的一方检测左侧身体信息及右侧身体信息中的一方之后,由左侧身体信息检测部29a及右侧身体信息检测部29b中的另一方检测左侧身体信息及右侧身体信息中的另一方。如果为这样的构成,则在检测左右的身体信息中的一方时,不易由另一方侧的施疗件将身体向歪斜变小的方向推
压。由此,与使左右的施疗件在突进的状态下抵接于身体来检测左右各自的突进量的构成相比,能够使被施疗者的左右的歪斜等的身体信息的检测精度提高。
49.控制部30在本实施方式中,在身体信息检测模式下,在使左侧施疗件27a及右侧施疗件27b中的一方比另一方突进的状态下,检测左侧身体信息及右侧身体信息中的一方,在使左侧施疗件27a及右侧施疗件27b中的另一方比一方突进的状态下,检测左侧身体信息及右侧身体信息中的另一方。如果为这样的构成,则检测左右一方侧(左右另一方侧)的身体信息时,不易由作为与突进的一方侧不同的一方侧的另一方(一方)的施疗件27a(27b)向歪斜变小的方向推压。由此,能够在实现装置构成的简单化的同时使被施疗者的身体信息的检测精度提高。
50.进退机构23在本实施方式中构成为,经由被马达24驱动的传递机构25、26(参照图3)使左侧施疗件27a及右侧施疗件27b进退。例如,如果为通过气室等的空压使左右的施疗件进退的机构,则会担心由被施疗者的载荷带来的空气的压缩导致突进量出现离差。通过上述构成,能够使左右的施疗件27a、27b稳定地突进。
51.左侧身体信息检测部29a及右侧身体信息检测部29b在本实施方式中构成为,检测被施疗者对左侧施疗件27a及右侧施疗件27b的负荷。如果为这样的构成,则可以说能够直接地检测被施疗者对左侧施疗件27a及右侧施疗件27b的负荷。由此,与例如通过光学式传感器检测伴随着气室的压缩的施疗件支承体的相对的移动那样的结构相比能够使检测精度提高。
52.支承部21相对于施疗部主体11侧固定地设置,支承部21以左侧施疗件27a及右侧施疗件27b能够进退的方式支承左侧施疗件27a及右侧施疗件27b。如果为这样的结构,则与支承施疗件27a(27b)的支承部21相对于施疗部主体11摆动自如地设置的结构相比,能够将左右的施疗件27a、27b更有效地向被施疗者推压。此外,能够更有效地使上述的左侧身体信息检测部29a及右侧身体信息检测部29b对于身体信息的检测精度提高。
53.传递机构25、26在本实施方式中具备被马达24旋转驱动的圆板状偏心凸轮25和设有该圆板状偏心凸轮25旋转自如地被接纳的凸轮承接部26a的施疗件安装部26。如果为这样的结构,则只要使圆板状偏心凸轮25旋转,圆板状偏心凸轮25就在安装有施疗件27a(27b)的施疗件安装部26的凸轮承接部26a内旋转,随之描绘弧线而能够使施疗件27a(27b)进退。由此,与例如设有通过弧状齿条或直线运动机构简单地使其倾斜运动或前后运动的机构作为进退机构的结构相比,能够使施疗件27a(27b)更顺畅而连续地一边移动一边进退,能够带来良好的指压效果。此外,能够通过以描绘弧的方式移动的施疗件27a(27b)从斜下方侧推入或从斜上方侧推入,能够执行多种多样的施疗。
54.具体而言,在本实施方式中,在左侧施疗件单元20a及右侧施疗件单元20b的各自中设有进退机构23a、23b。即,在左侧施疗件单元20a中,设有使左侧施疗件27a进退的左侧进退机构23a,在右侧施疗件单元20b中,设有使右侧施疗件27b进退的右侧进退机构23b。就这些左侧施疗件单元20a及右侧施疗件单元20b而言,包括设在它们中的左侧进退机构23a及右侧进退机构23b、左侧施疗件27a及右侧施疗件27b以及左侧身体信息检测部29a及右侧身体信息检测部29b在内,都为相互同样的结构,以下,对于具体的结构的一例,取左右中的一方为例进行说明。以下,在不需要左右的区别的情况下,将左侧施疗件单元20a及右侧施疗件单元20b设为施疗件单元20,将左侧进退机构23a及右侧进退机构23b设为进退机构23,
将左侧施疗件27a及右侧施疗件27b设为施疗件27,将左侧身体信息检测部29a及右侧身体信息检测部29b设为身体信息检测部29而进行说明。在后述的说明中参照的图6及图8中,将左侧施疗件单元20a及右侧施疗件单元20b简略化而图示。
55.施疗件单元20的支承部21如图3的(a)所示,其施疗部主体11侧被固定在臂部19,臂部19以从施疗部主体11朝向前方突出的方式设置。该支承部21不能相对于臂部19变位地被固定。上述的施疗件宽度驱动部16、揉按驱动部17及敲打驱动部18也可以构成为,经由各种机械性的传递机构使该臂部19变位。这里,施疗件单元20的支承部21相对于施疗部主体11侧固定地设置是指,包括由施疗件宽度驱动部16、揉按驱动部17及敲打驱动部18使施疗件27变位这样的结构,但排除随着被施疗者的身体的抵接而变位自如那样的结构。施疗件27向被施疗者的身体的抵接,并不限于将施疗件27直接与身体抵接的构成,包括经由以将施疗件27的前方侧覆盖的方式通常被设置的片状的罩或衣服等抵接。
56.在本实施方式中,支承部21在身体长度方向上为长尺寸状。该支承部21构成为,在其长度方向一侧端部设有通过进退机构23进退的施疗件27,在长度方向另一侧端部设有其他施疗件22。在图例中,从左右方向上观察,支承部21呈月牙(飞镖状),构成为,在其上端部设有通过进退机构23进退的施疗件27,在下端部设有作为其他施疗件的下施疗件22。该下施疗件22也可以呈绕轴向为大致左右方向的轴旋转自如的滚轮状。
57.也可以代替在上侧设有通过进退机构23进退的施疗件27的结构,而是设在下侧的结构。在支承部21,也可以仅设有通过进退机构23进退的施疗件27。也可以在该支承部21或其他部位处,在上下或左右设有再其他的施疗件。支承部21的形状并不限于月牙状(飞镖状),也可以是其他各种形状。
58.圆板状偏心凸轮25经由适当的减速机与马达24连结,被固定地设置以使其不能相对于轴向为大致左右方向的凸轮轴23a旋转。该圆板状偏心凸轮25是厚度方向大致为左右方向的板状,在厚度方向上观察呈正圆状。凸轮轴23a设在从该圆板状偏心凸轮25的圆心偏移的位置。
59.施疗件安装部26在前后方向上为长尺寸状,构成为在其前后方向中间部设有凸轮承接部26a。在图例中,施疗件安装部26在左右方向上观察呈椭圆状(蛋状),构成为在其前后方向大致中央部设有凸轮承接部26a。也可以在该凸轮承接部26a的内周面与圆板状偏心凸轮25的外周面之间设置适当的滚动轴承等。
60.在该施疗件安装部26,设有被插入销状的限制突起23b的导引槽26b,导引槽26b被固定地设在支承部21侧。该导引槽26b在比凸轮承接部26a靠后方侧(导轨9侧)以在前后方向上延伸的方式设置。通过限制突起23b沿着该导引槽26b相对地移动,伴随着圆板状偏心凸轮25的旋转的施疗件安装部26的变位被限制。施疗件安装部26的形状并不限于椭圆状(鸡蛋状),也可以是其他各种形状。
61.施疗件27借助在前后方向上为长尺寸状的被安装部28安装在施疗件安装部26。施疗件27设在被安装部28的前端部。该施疗件27也可以呈绕轴向为大致左右方向的轴旋转自如的滚轮状。
62.如图3的(a)~图3的(d)所示,如果将马达24驱动,则圆板状偏心凸轮25旋转,由此,与一边受到限制突起23b的限制一边以描绘弧线的方式移动的施疗件安装部26连动,该施疗件27以描绘弧线的方式一边移动一边前后进退。
63.被安装部28其前后方向中间部位经由保持轴26c安装在施疗件安装部26。在图例中,在施疗件安装部26的上方侧以沿前后方向延伸的方式设置的被安装部28的前后方向中间部位,设有朝向下方侧垂下的部位,该部位被安装在保持轴26c。该被安装部28在施疗件27与被施疗者等不接触状态下,能够绕保持轴26c向其后端侧变位到作为施疗件安装部26侧的下方侧的一侧旋转,但另一方面,通过适当的止挡而不能向相反侧旋转。保持轴26c并不限于设在施疗件安装部26侧的形态,也可以设在被安装部28侧。
64.作为进退机构23,并不限于上述那样的通过圆板状偏心凸轮25的旋转使施疗件27以描绘弧线的方式一边移动一边前后进退的机构。作为进退机构23,也可以构成为通过偏心圆板或弧状齿条等使支承施疗件27的支承臂倾斜运动,或为通过各种连杆机构等使其直线运动地进退的机构等。作为进退机构23,并不限于这样的通过机械性的传递机构使施疗件27进退的机构,也可以是通过气室等的空压使其进退的机构。作为进退机构23,只要是能够将左右的施疗件27a、27b各自单独地进退的机构就可以,并不限于在左右各自独立地被设置的结构。
65.身体信息检测部29设在被安装部28的后端侧与施疗件安装部26之间,检测伴随着向被施疗者的身体的施疗件27的抵接带来的被安装部28向后端侧的下方侧的变位。作为身体信息检测部29,也可以是检测来自被安装部28的后端侧的推压带来的压力的应变计或半导体压力传感器等的压力传感器。或者,作为身体信息检测部29,也可以构成为能够通过检测流到马达24中的电流值检测负荷,也可以为其他各种构成。作为身体信息检测部29,并不限于这样的检测被施疗者对施疗件27的负荷的构成,也可以是检测被安装部28的适当的部位处的变位的电位计,或光学传感器、磁传感器、超声波传感器等,是怎样的传感器都可以。
66.在按摩机1中,设有与外部的商用电源等连接而向上述的各部供给驱动电源的适当的电源部及电源线等。
67.按摩机1如图4所示,具备操作显示部31。该操作显示部31也可以是经由适当的信号线等与控制部30连接的遥控器等。在该操作显示部31,设有将该按摩机1起动及停止(开启/关闭)的操作部、选择各种施疗模式的操作部、使靠背部2或载腿部4倾斜的操作部、使施疗单元10移动的操作部等。作为操作显示部31,并不限于用手指等操作的操作部,也可以具备能够通过声音输入来操作的声音识别部,也可以为其他各种结构。作为操作显示部31,并不限于预先附属地设在按摩机1,也可以是安装有操作用的应用软件的便携信息终端等。
68.控制部30被内置在按摩机1的座部3下方侧等。在该控制部30,设有包括cpu(中央处理单元,central processing unit)等的控制电路、及rom、ram等的各种存储器等的微控制器(mcu)等。在该控制部30,如图4所示,经由信号线等连接着上述的各驱动部及检测部等。按照保存在该控制部30的存储器等中、预先设定的程序,一边参照由各检测部得到的检测值一边控制各驱动部,执行后述的身体信息检测模式或各种施疗模式。后述的身体信息检测模式既可以构成为,通过操作在设于上述便携信息终端或该按摩机1的操作显示部31中设有的适当的操作部、或在声音识别部中受理声音输入而被执行,也可以构成为包含在当进行了该按摩机1的起动操作时被适当执行的初始设定模式等中。
69.控制部30在本实施方式中,在身体信息检测模式中检测作为被施疗者的身体信息的左肩的高度位置及右肩的高度位置。如果为这样的构成,则可以执行推断被施疗者的左右的肩的上下方向的倾斜的肩上下倾斜检测模式。
70.具体而言,如图5的(a)及图6的(a)、图6的(b)所示,在使左侧施疗件27a比右侧施疗件27b突进的状态下,检测左肩的高度位置(步骤s100)。此时,在通过左侧进退机构23a使左侧施疗件27a成为最前方位置(参照图3的(c))、通过右侧进退机构23b使右侧施疗件27b成为最后方位置(参照图3的(a))的状态下,通过主体升降驱动部12使位于比被施疗者的肩靠上方侧的施疗单元10向下方侧移动。作为在身体信息检测模式下使左右的施疗件27a、27b进退的方式,并不限于上述及后述的最前方位置及最后方位置,也可以设为适当的位置,以使一方能够与被施疗者抵接而另一方不与被施疗者抵接。
71.并且,随着左侧施疗件27a向左肩的抵接而一旦由左侧身体信息检测部29a得到的检测值高于预先设定的阈值,则将该高于了的位置作为左肩的高度位置存储到存储器中。该左肩的高度位置能够由上述的主体升降位置检测部13检测。
72.接着,与上述相反,在使右侧施疗件27b比左侧施疗件27a突进的状态下检测右肩的高度位置(步骤s101)。此时,在通过右侧进退机构23b将右侧施疗件27b设为最前方位置、通过左侧进退机构23a将左侧施疗件27a设为最后方位置的状态下,通过主体升降驱动部12使位于比被施疗者的肩靠上方侧的施疗单元10向下方侧移动。并且,随着右侧施疗件27b向右肩的抵接而一旦由右侧身体信息检测部29b得到的检测值高于预先设定的阈值,则将该高于了的位置作为右肩的高度位置保存到存储器中。该右肩的高度位置与上述同样,能够由主体升降位置检测部13检测。
73.接着,推断左右的肩的上下方向的倾斜(步骤s102)。即,将如上述那样检测到的左肩的高度位置与右肩的高度位置比较,推断左右的肩的上下方向的倾斜。
74.也可以在该肩上下倾斜检测模式的执行之前,执行检测被施疗者的大约的肩的高度位置(基准位置)的肩高度位置检测模式。在该肩高度位置检测模式中,也可以在使左右的施疗件27a、27b分别突进的状态下,使位于比被施疗者的肩靠上方侧的施疗单元10向下方侧移动来检测肩的高度位置。也可以在操作显示部31设置能够变更由该肩高度位置检测模式检测到的肩高度位置的操作部。在肩上下倾斜检测模式中,当将施疗单元10位于比被施疗者的肩靠上方侧时,也可以不是上限位置,而是位于比通过肩高度位置检测模式检测到的肩的高度位置稍靠上方侧。
75.控制部30在本实施方式中,在身体信息检测模式中,检测作为被施疗者的身体信息的左肩的前后位置及右肩的前后位置。如果为这样的构成,则可以执行推断被施疗者的左右的肩的前后方向的倾斜的肩前后倾斜检测模式。
76.具体而言,如图5的(b)及图6的(c)、图6的(d)所示,在使左侧施疗件27a比右侧施疗件27b突进的状态下检测左肩的前后位置(步骤s200)。此时,如图6的(c)所示,也可以将左侧施疗件27a设为最前方位置,将右侧施疗件27b设为最后方位置,将施疗部主体11通过主体进退机构设为后退位置(也可以是最后退位置。以下同样),从该状态起,如图6的(d)所示,通过主体进退机构使施疗部主体11前进。并且,随着左侧施疗件27a向左肩的抵接而一旦由左侧身体信息检测部29a得到的检测值高于预先设定的阈值,则将该高于了的位置作为左肩的前后位置保存到存储器中。该左肩的前后位置能够由上述的主体进退位置检测部15检测。
77.此时,也可以在将施疗部主体11位以使左侧施疗件27a成为通过上述肩高度位置检测模式或肩上下倾斜检测模式的执行而检测到的肩的高度位置(或左肩的高度位置)的
状态下进行。
78.接着,与上述相反,在使右侧施疗件27b比左侧施疗件27a突进的状态下检测右肩的前后位置(步骤s201)。此时,将右侧施疗件27b设为最前方位置,将左侧施疗件27a设为最后方位置,通过主体进退机构将施疗部主体11设为后退位置,从该状态起,通过主体进退机构使施疗部主体11前进。并且,随着右侧施疗件27b向右肩的抵接而一旦由右侧身体信息检测部29b得到的检测值高于预先设定的阈值,则将该高于了的位置作为右肩的前后位置保存到存储器中。该右肩的前后位置与上述同样,能够由主体进退位置检测部15检测。
79.此时,也可以在将施疗部主体11位以使右侧施疗件27b成为通过上述肩高度位置检测模式或肩上下倾斜检测模式的执行而检测到的肩的高度位置(或右肩的高度位置)的状态下进行。
80.接着,推断左右的肩的前后方向的倾斜(步骤s202)。即,将如上述那样检测到的左肩的前后位置与右肩的前后位置比较,推断左右的肩的前后方向的倾斜。
81.控制部30在本实施方式中,在身体信息检测模式下检测作为被施疗者的身体信息的左骨盆的高度位置及右骨盆的高度位置。如果为这样的构成,则可以执行推断被施疗者的左右的骨盆的上下方向的倾斜的骨盆上下倾斜检测模式。
82.具体而言,如图7的(a)及图8的(a)、图8的(b)所示,在使左侧施疗件27a比右侧施疗件27b突进的状态下检测左骨盆的高度位置(步骤s300)。此时,与上述同样,在将左侧施疗件27a设为最前方位置、将右侧施疗件27b设为最后方位置的状态下,通过主体升降驱动部12使位于比被施疗者的骨盆靠上方侧的施疗单元10向下方侧移动。在该骨盆上下倾斜检测模式中,也可以根据通过上述肩高度位置检测模式或肩上下倾斜检测模式的执行检测到的肩的高度位置(或左右某个肩的高度位置)推断大致的基准骨盆高度位置,将左右的施疗件27a、27b设为最后方位置而使施疗单元10向下方侧移动到比该位置稍高的位置。并且,随着左侧施疗件27a向左骨盆的抵接而一旦由左侧身体信息检测部29a得到的检测值高于预先设定的阈值,在将该高于了的位置作为左骨盆的高度位置保存到存储器中。该左骨盆的高度位置与上述同样,可以由主体升降位置检测部13检测。
83.接着,与上述相反,在使右侧施疗件27b比左侧施疗件27a突进的状态下检测右骨盆的高度位置(步骤s301)。此时,在将右侧施疗件27b设为最前方位置、将左侧施疗件27a设为最后方位置的状态下,通过主体升降驱动部12使位于比被施疗者的骨盆(上述的基准骨盆高度位置)靠上方侧的施疗单元10向下方侧移动。并且,随着右侧施疗件27b向右骨盆的抵接而一旦由右侧身体信息检测部29b得到的检测值高于预先设定的阈值,则将该高于了的位置作为右骨盆的高度位置保存到存储器中。该右骨盆的高度位置与上述同样,可以由主体升降位置检测部13检测。
84.接着,推断左右的骨盆的上下方向的倾斜(步骤s302)。即,将如上述那样检测到的左骨盆的高度位置与右骨盆的高度位置比较,推断左右的骨盆的上下方向的倾斜。
85.控制部30在本实施方式中,在身体信息检测模式下检测作为被施疗者的身体信息的左骨盆的前后位置及右骨盆的前后位置。如果为这样的构成,则能够执行推断被施疗者的左右的骨盆的前后方向的倾斜的骨盆前后倾斜检测模式。
86.具体而言,如图7的(b)及图8的(c)、图8的(d)所示,在使左侧施疗件27a比右侧施疗件27b突进的状态下检测左骨盆的前后位置(步骤s400)。此时,如图8的(c)所示,将左侧
施疗件27a设为最前方位置,将右侧施疗件27b设为最后方位置,通过主体进退机构将施疗部主体11设为后退位置,从该状态,如图8的(d)所示,通过主体进退机构使施疗部主体11前进。并且,随着左侧施疗件27a向左骨盆的抵接而一旦由左侧身体信息检测部29a得到的检测值高于预先设定的阈值,则将该高于了的位置作为左骨盆的前后位置保存到存储器中。该左骨盆的前后位置可以由上述的主体进退位置检测部15检测。
87.此时,也可以在将疗部主体11位以使左侧施疗件27a成为通过上述基准骨盆高度位置或骨盆上下倾斜检测模式的执行而检测到的左骨盆的高度位置的状态下进行。
88.接着,与上述相反,在使右侧施疗件27b比左侧施疗件27a突进的状态下检测右骨盆的前后位置(步骤s401)。此时,将右侧施疗件27b设为最前方位置,将左侧施疗件27a设为最后方位置,通过主体进退机构将施疗部主体11设为后退位置,从该状态,通过主体进退机构使施疗部主体11前进。并且,随着右侧施疗件27b向右骨盆的抵接而一旦由右侧身体信息检测部29b得到的检测值高于预先设定的阈值,则将该高于了的位置作为右骨盆的前后位置保存到存储器中。该右骨盆的前后位置与上述同样,能够由主体进退位置检测部15检测。
89.此时,也可以在将疗部主体11位以使右侧施疗件27b成为通过上述基准骨盆高度位置或骨盆上下倾斜检测模式的执行而检测到的右骨盆的高度位置的状态下进行。
90.接着,推断左右的骨盆的前后方向的倾斜(步骤s402)。即,将如上述那样检测到的左骨盆的前后位置与右骨盆的前后位置比较,推断左右的骨盆的前后方向的倾斜。
91.在上述的肩上下倾斜检测模式及肩前后倾斜检测模式中,也可以将左右的施疗件27a、27b的宽度位于与左右的肩对应的宽度,在骨盆上下倾斜检测模式及骨盆前后倾斜检测模式下,将左右的施疗件27a、27b的宽度位于与左右的骨盆对应的宽度。
92.在上述的各身体信息检测模式中,例示了先从左侧身体信息进行检测的方式,但也可以为先从右侧身体信息进行检测的方式。
93.在上述的例子中,表示了在身体信息检测模式中执行肩上下倾斜检测模式、肩前后倾斜检测模式、骨盆上下倾斜检测模式及骨盆前后倾斜检测模式的构成,但也可以为执行它们中的至少一个的构成。
94.在上述的例子中,表示了具备一个施疗部(施疗单元10)的例子,但也可以设为上下具备多个施疗部(施疗单元10)的构成,设为由上侧的施疗部(施疗单元10)检测肩侧的身体信息、由下侧的施疗部(施疗单元10)检测腰(骨盆)侧的身体信息那样的构成等。
95.在上述的例子中,表示了在使左右的施疗件27a、27b中的一方比另一方突进的状态下检测左右的身体信息中的一方的例子,但并不限于这样的方式。例如,也可以为以下这样的方式等:在使左右的施疗件27a、27b的两者突进的状态下,如上述那样使其降低或前进,一旦左右的身体信息检测部29a、29b中的一方的检测值高于了上述阈值,则将该位置作为左右一方的身体信息保存到存储器中,接着使一方侧的施疗件后退而降低或前进,如果另一方的检测值高于了上述阈值,则将该位置作为左右另一方的身体信息保存到存储器中。在此情况下,在使左右的施疗件27a、27b的两者突进的状态下,在由左右的身体信息检测部29a、29b进行的检测是大致同时的情况下,推断为没有歪斜或扭曲,在此情况下,也可以不是执行身体信息检测模式,而是执行肩高度位置等的身体位置检测模式。
96.进而,也可以代替左右的施疗件27a、27b设在一个施疗单元10中的结构,而具备分别具有左右的施疗件27a、27b、分别能够沿着身体长度方向移动的左右一对施疗部。在此情
况下,也可以为在将左右的施疗件27a、27b中的一侧设为作为相对于被施疗者不接触的位置的上限位置等的状态下,使另一侧降低或前进来检测另一侧的身体信息那样的方式等。
97.控制部30也可以基于如上述那样检测到的左右的肩的上下方向的倾斜信息及左右的骨盆的上下方向的倾斜信息来推断背骨(脊柱)的歪斜程度。
98.如图9的(a)所示,控制部30在肩及骨盆的哪个都没有上下方向的倾斜的情况下(上下方向的倾斜为预先设定的规定值以下的情况,以下同样),推断为没有背骨的歪斜。
99.如图9的(b)所示,控制部30在右肩比左肩低、骨盆没有上下方向的倾斜的情况下,推断为以背骨的肩侧部位向左侧突出的弯曲状歪斜。
100.如图9的(c)所示,控制部30在左肩比右肩低、骨盆没有上下方向的倾斜的情况下,推断为以背骨的肩侧部位向右侧突的弯曲状歪斜。
101.如图9的(d)所示,控制部30在肩没有上下方向的倾斜、右骨盆比左骨盆低的情况下,推断为以背骨的腰侧部位向右侧突出的弯曲状歪斜。
102.如图9的(e)所示,控制部30在肩没有上下方向的倾斜、左骨盆比右骨盆低的情况下,推断为以背骨的腰侧部位向左侧突出的弯曲状歪斜。
103.如图9的(f)所示,控制部30在右肩比左肩低、右骨盆比左骨盆低的情况下,推断为以背骨的肩侧部位向左侧突出、背骨的腰侧部位向右侧突出的弯曲状歪斜。
104.如图9的(g)所示,控制部30在右肩比左肩低、左骨盆比右骨盆低的情况下,推断为以背骨的整体向左侧突出的弯曲状歪斜。
105.如图9的(h)所示,控制部30在左肩比右肩低、左骨盆比右骨盆低的情况下,推断为以背骨的肩侧部位向右侧突出、背骨的腰侧部位向左侧突出的弯曲状歪斜。
106.如图9的(i)所示,控制部30在左肩比右肩低、右骨盆比左骨盆低的情况下,推断为以背骨的整体向右侧突出的弯曲状歪斜。
107.这样的背骨的歪斜信息也可以包含歪斜的大小信息。
108.控制部30也可以基于如上述那样检测到的左右的肩的前后方向的倾斜信息及左右的骨盆的前后方向的倾斜信息来推断背骨(脊柱)的扭曲状况。
109.如图10的(a)所示,控制部30在左右的肩没有前后方向的倾斜的情况下(前后方向的倾斜为预先设定的规定值以下的情况,以下同样),推断为在背骨的肩侧部位没有扭曲。
110.如图10的(b)所示,控制部30在右肩比左肩靠前方的情况下,推断为在背骨的肩侧部位向逆时针侧有扭曲。
111.如图10的(c)所示,控制部30在左肩比右肩靠前方的情况下,推断为在背骨的肩侧部位向顺时针侧有扭曲。
112.如图10的(d)所示,控制部30在左右的骨盆没有前后方向的倾斜的情况下,推断为在背骨的腰侧部位没有扭曲。
113.如图10的(e)所示,控制部30在右骨盆比左骨盆靠前方的情况下,推断为在背骨的腰侧部位向逆时针侧有扭曲。
114.如图10的(f)所示,控制部30在左骨盆比右骨盆靠前方的情况下,推断为在背骨的腰侧部位向顺时针侧有扭曲。
115.这样的背骨的扭曲信息也可以包含扭曲的大小信息。
116.控制部30也可以基于如上述那样检测到的背骨的歪斜信息,从预先设定的多个不
同的施疗模式中决定最优的施疗模式并执行。控制部30也可以基于如上述那样检测到的背骨的扭曲信息,从预先设定的多个不同的施疗模式中决定最优的施疗模式并执行。例如,也可以在右侧和左侧使强度、次数、顺序等不同来进行施疗。在此情况下,也可以不仅是由后背侧的施疗单元10进行的施疗,还使由包括在上述的载腿部4及扶手部5、5处设置的气室在内的各气室进行的施疗在右侧和左侧使强度、次数、顺序等不同。在由施疗单元10进行施疗时,也可以基于由上述的左侧身体信息检测部29a及右侧身体信息检测部29b得到的检测值使强度等变化。
117.构成有关本实施方式的按摩机1的各部的构成及身体信息检测模式并不限于上述的例子,能够进行其他各种变形。
118.标号说明
119.1按摩机
120.10施疗单元(施疗部)
121.11 施疗部主体
122.21 支承部
123.23 进退机构
124.24 马达
125.25圆板状偏心凸轮(传递机构)
126.26施疗件安装部(传递机构)
127.26a凸轮承接部
128.27a左侧施疗件
129.27b右侧施疗件
130.29a左侧身体信息检测部
131.29b 右侧身体信息检测部
132.30 控制部
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。