1.本发明属于图像检测技术领域,特别涉及一种图像检测模型训练方法及装置、可读存储介质。
背景技术:
2.近年,基于深度学习的图像检测方法已经广泛替代人工肉眼检测,不少基于深度学习的智能场景感知方法也被广泛应用在各种智能驾驶场景中。传统的基于机器视觉的智能驾驶感知场景方法,往往采用常规的图像处理算法或人工设计特征加分类器方式。在训练数据不充分情况下,现有的训练方法会导致模型过拟合或性能恶化,无法精确检测图像中的目标。
技术实现要素:
3.本发明实施例解决的是图像检测准确率低的技术问题。
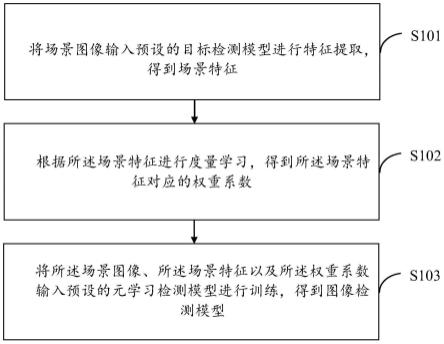
4.为解决上述技术问题,本发明实施例提供一种图像检测模型训练方法,包括:将场景图像输入预设的目标检测模型进行特征提取,得到场景特征根据所述场景特征进行度量学习,得到所述场景特征对应的权重系数;将所述场景图像、所述场景特征以及所述权重系数输入预设的元学习检测模型进行训练,得到图像检测模型。
5.可选的,采用以下方法得到所述预设的目标检测模型:根据预设的基础数据库,采用目标检测网络进行初始化训练,得到所述预设的目标检测模型。
6.可选的,在得到所述预设的目标检测模型后,还包括:获取所述预设的目标检测模型在初始化训练中得到的目标数据;对所述目标数据进行场景分类,得到所述目标数据对应的标签;将所述标签输入所述预设的目标检测模型中,使得所述标签与所述目标数据对应。
7.为解决上述技术问题,本发明实施例还公开了一种图像检测模型训练装置,包括:提取单元,用于将场景图像输入预设的目标检测模型进行特征提取,得到场景特征;学习单元,用于根据所述场景特征进行度量学习,得到所述场景特征对应的权重系数;训练单元,用于将所述场景图像、所述场景特征以及所述权重系数输入预设的元学习检测模型进行训练,得到图像检测模型。
8.可选的,所述提取单元采用以下方法得到所述预设的目标检测模型:根据预设的基础数据库,采用目标检测网络进行初始化训练,得到所述预设的目标检测模型。
9.可选的,所述提取单元,还用于:获取所述预设的目标检测模型在初始化训练中得到的目标数据;对所述目标数据进行场景分类,得到所述目标数据对应的标签;将所述标签输入所述预设的目标检测模型中,使得所述标签与所述目标数据对应。
10.本发明实施例还公开了一种可读存储介质,计算机可读存储介质为非易失性存储介质或非瞬态存储介质,其上存储有计算机指令,所述计算机指令运行时执行上述任一种所述的图像检测模型训练方法。
11.本发明实施例还提供了一种图像检测模型训练装置,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机指令,所述处理器运行所述计算机指令时执行上述任一种所述的图像检测模型训练方法。
12.与现有技术相比,本发明实施例的技术方案具有以下有益效果:
13.将场景图像输入预设的目标检测模型进行特征提取,得到场景特征;根据所述场景特征进行度量学习,得到所述场景特征对应的权重系数;将所述场景图像、所述场景特征以及所述权重系数输入预设的元学习检测模型进行训练,得到图像检测模型。有效增强图像检测模型的泛化能力,在训练所需的场景图像不充足的情况下达成图像检测的高准确率。
附图说明
14.图1是本发明实施例一种图像检测模型训练方法的流程图;
15.图2是本发明实施例一种图像检测模型训练装置的结构示意图。
具体实施方式
16.现有技术中,传统的基于机器视觉的智能驾驶感知场景方法,往往采用常规的图像处理算法或人工设计特征加分类器方式。在训练数据不充分情况下,现有的训练方法会导致模型过拟合或性能恶化,无法精确检测图像中的目标。
17.本发明实施例中,将场景图像输入预设的目标检测模型进行特征提取,得到场景特征;根据所述场景特征进行度量学习,得到所述场景特征对应的权重系数;将所述场景图像、所述场景特征以及所述权重系数输入预设的元学习检测模型进行训练,得到图像检测模型。有效增强图像检测模型的泛化能力,在训练所需的场景图像不充足的情况下达成图像检测的高准确率。
18.为使本发明的上述目的、特征和有益效果能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
19.本发明实施例提供了一种图像检测模型训练方法,参照图1,以下通过具体步骤进行详细说明。
20.步骤s101,将场景图像输入预设的目标检测模型进行特征提取,得到场景特征。
21.在实际应用中,场景图像可以由各类图像传感器采集而得到,也可以直接获取预设的基础数据库中的场景图像。在图像中包含各类场景的前提下,不限定场景图像的获取形式、具体格式。
22.在具体实施中,可以采用以下方法得到所述预设的目标检测模型:根据预设的基础数据库,采用目标检测网络进行初始化训练,得到所述预设的目标检测模型。目标检测网络可以是区域卷积神经网络,也可以是yolo(you only look once)等其他目标检测网络。
23.在具体实施中,在得到所述预设的目标检测模型后,还可以获取所述预设的目标检测模型在初始化训练中得到的目标数据;对所述目标数据进行场景分类,得到所述目标数据对应的标签;将所述标签输入所述预设的目标检测模型中,使得所述标签与所述目标数据对应。对目标数据进行初步分析,并结合标准化场景分类,再对预设的目标检测模型中数据进行标注整理,可以进一步完善预设的目标检测模型,提高检测准确度。
24.在实际应用中,场景分类指的就是从多幅图像中区分出具有相似场景特征的图像,并正确的对这些图像进行分类。一般来说,场景分类可以将数据库中的不同图像按照一定的分类特征进行分类。在对所述目标数据进行场景分类时,可以采用以下场景分类方法:颜色直方图、方向梯度直方图、局部二值模式、词袋模型、稀疏编码等。
25.步骤s102,根据所述场景特征进行度量学习,得到所述场景特征对应的权重系数。
26.在实际应用中,现有的目标检测模型训练需要大量的场景图像作为训练数据。当训练数据不足时,模型无法取得良好的训练效果。理想的图像需要根据被检测物体表面形态的不同图像性质,来进行成像方案的设计。当图像是光照均匀的,并且能将被检测物体的信息明显地体现出来,有助于模型训练以及后续的视觉场景感知。
27.在本发明一实施例中,场景图像中缺陷数据的样本数量小,且场景图像的分布不均衡,通过度量学习比对各个场景特征,得到所述场景特征对应的权重系数,进而调整场景特征的重要程度,解决了现有方法在训练阶段样本不充分情况下导致模型过拟合或性能恶化的问题。
28.在实际应用中,可以采用多种方式对所述场景特征进行度量学习,例如监督的全局度量学习、监督的局部度量学习、非监督的度量学习、度量学习的非线性模型,具体方法有主成分分析、多维尺度变换、非负矩阵分解、独立成分分析、邻域保持嵌入、局部保留投影、等距映射、局部线性嵌入、拉普拉斯特征映射等方式。度量学习又称相似度学习,可以最大程度上抽取样本内含特征,使用特征对比的方式判定样本的种类归属。
29.步骤s103,将所述场景图像、所述场景特征以及所述权重系数输入预设的元学习检测模型进行训练,得到图像检测模型。
30.在实际应用中,元学习检测模型通过学习场景图像、场景特征以及权重系数,获得了良好的初始化权重,可以快速适应新的图像检测任务,在训练数据不充足的情况下迅速收敛,高效准确地完成图像检测。同时,由于模型训练过程中减少了对标签图像数据的需求,显著节约了人力物力成本。
31.综上,将场景图像输入预设的目标检测模型进行特征提取,得到场景特征;根据所述场景特征进行度量学习,得到所述场景特征对应的权重系数;将所述场景图像、所述场景特征以及所述权重系数输入预设的元学习检测模型进行训练,得到图像检测模型。有效增强图像检测模型的泛化能力,在训练所需的场景图像不充足的情况下达成图像检测的高准确率。
32.参照图2,本发明实施例还提供了一种图像检测模型训练装置20,包括:提取单元201、学习单元202以及训练单元203;
33.其中,所述提取单元201,用于将场景图像输入预设的目标检测模型进行特征提取,得到场景特征;
34.所述学习单元202,用于根据所述场景特征进行度量学习,得到所述场景特征对应的权重系数;
35.所述训练单元203,用于将所述场景图像、所述场景特征以及所述权重系数输入预设的元学习检测模型进行训练,得到图像检测模型。
36.在具体实施中,提取单元201可以采用以下方法得到所述预设的目标检测模型:根据预设的基础数据库,采用目标检测网络进行初始化训练,得到所述预设的目标检测模型。
37.在具体实施中,提取单元201,还可以获取所述预设的目标检测模型在初始化训练中得到的目标数据;对所述目标数据进行场景分类,得到所述目标数据对应的标签;将所述标签输入所述预设的目标检测模型中,使得所述标签与所述目标数据对应。
38.本发明实施例中的图像检测模型训练装置20执行上述实施例中提供的图像处理方法中s101至s103的步骤。
39.本发明实施例还提供了一种可读存储介质,计算机可读存储介质为非易失性存储介质或非瞬态存储介质,其上存储有计算机指令,所述计算机指令运行时执行本发明上述实施例中提供的图像检测模型训练方法。
40.本发明实施例还提供了一种图像检测模型训练装置,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机指令,所述处理器运行所示计算机指令时,执行本发明上述实施例中提供的所述的图像检测模型训练方法。
41.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于任一计算机可读存储介质中,存储介质可以包括:rom、ram、磁盘或光盘等。
42.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。