1.本发明属于无人机航迹预测领域,具体的说,涉及一种低空无人机监视和航迹预测方法。
背景技术:
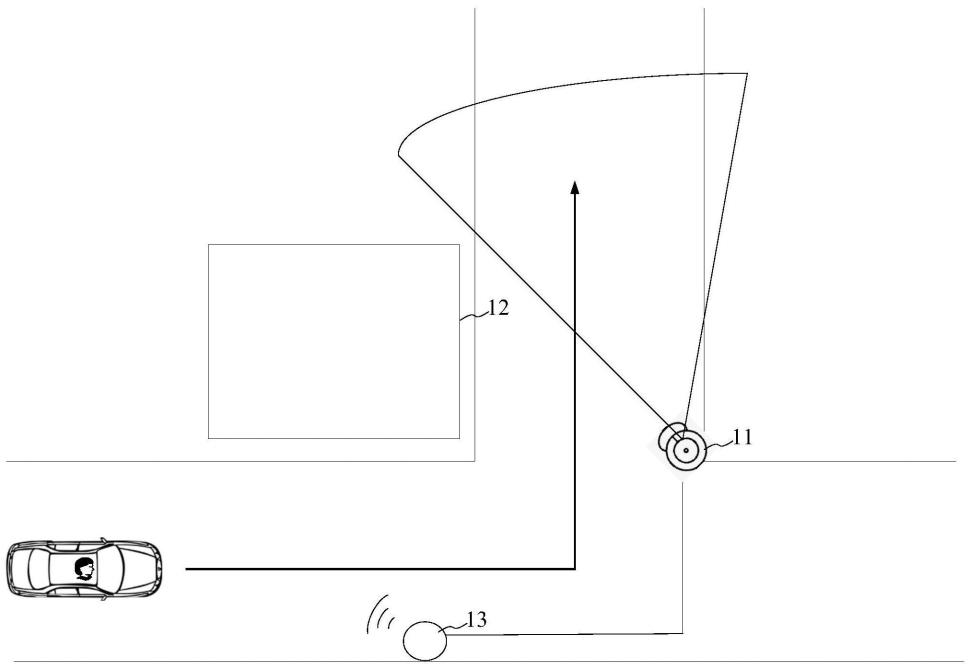
2.无人机当前正处在一个日趋繁荣的发展形式之中,在许多领域诸如植保、电力巡检和通信等场景中得到了广泛的应用。当前低空空域内无人机的数量越来越多,因此对无人机实行空中交通管制是无人机未来各种应用场景实现的必要基础。但是无人机的飞行轨迹复杂多变,且态势数据的获取手段十分有限,这给航迹预测带来了非常大的难度。为了解决以上难题,具有信息更新速度快、地面站建设成本低等突出优点,且大量应用于民航客机的位置信息获取的ads-b是可选的技术手段之一。我们提出了许多的多方案来解决该问题,该发明也将解决低空无人机的跟踪和监视作为无人机管制中的着力点。
3.无人机载ads-b out系统按照一定的时间间隔向所在空域广播自身的态势信息,这些信息按照时间顺序组成。lstm在预测时序数据时由于其自身独特的结构,相比其他的神经网络具有更高的预测精度,可以记住更长时间步的特征信息。我们提出了一种基于ads-b获取无人机飞行过程中三维定位数据的系统结构,并根据已有的无人机ads-b out广播的信息通过循环使用lstm预测未来时间步的无人机飞行航迹趋势。
技术实现要素:
4.本发明针对现有技术的不足,提供一种低空无人机监视和航迹预测方法,具体方案如下:一种低空无人机监视和航迹预测方法,包括以下步骤:
5.步骤1,将空域划分为若干子空域,子空域由一个总控制站进行无人机监视,每个子空域配备有一个ads-b地面基站,每个子空域中有n架无人机,子空域g内无人机i通过若干颗gps卫星进行定位得到当前时刻t无人机i的位置信息;
6.步骤2,将步骤1中无人机i接收到的位置信息ug(i),利用机载ads-b out在广播时刻t向子空域g内广播飞行态势信息u
g(i)t
;
7.步骤3,将步骤2中广播出去的ads-b信息,通过子空域g内负责ads-b信息接收的地面基站bsg接收;
8.步骤4,将步骤3中地面基站bs接收到的ads-b信息发送给管制中心;
9.步骤5,将步骤4中发送给管制中心的信息,按照无人机的编号把航迹数据进行按ads-b广播时刻的先后按序存储为无人机航迹dug(i)等待后续预测监视;
10.步骤6,将子空域g内已存储的无人机航迹数据集作为训练数据进行训练得到预测航迹模型pre1;
11.步骤7,将步骤6中得到的预测模型pre1,并使用已接收的无人机航迹dug(i)的数据对pre1进行训练并更新得到预测模型pre2;
12.步骤8,取步骤7中的预测模型pre2,对待预测航迹进行预测得到未来两个广播时
刻t 1和t 2的预测数据;
13.步骤9,在广播时刻t 1,取预测模型pre2,对待预测航迹进行预测得到未来两个广播时刻t 2和t 3的预测数据;如此重复进行预测直到航迹结束。
14.每架无人机的飞行数据u=(lat,lon,alt),其中lat为纬度,lon为经度,alt为高度。
15.子空域g内无人机i通过4颗gps卫星进行定位得到当前时刻t无人机i的位置信息。
16.步骤6中,训练得到预测航迹模型pre1的具体方法为:
17.首先将管制中心已经存储的空域g内各无人机航迹数据作为模型的初始训练集;
18.在将数据输入lstm模型训练之前进行ads-b数据的预处理,采用的方法是均值归一化:
[0019][0020][0021][0022]
其中,和分别为输入航迹纬度,经度和高度的均值,和分别为输入航迹纬度,经度和高度的标准差,lat
g(i)t
,lon
g(i)t
,alt
g(i)t
分别为无人机i在t时刻纬度,经度和高度,分别为无人机i在t时刻纬度,经度和高度经过均值归一化后的数据;将经过均值归一化后的无人机航迹数据航迹数据和输入到训练模型中进行训练得到相对应的归一化预测航迹数据测航迹数据和归一化纬度、经度和高度的预测值与归一化输入数据的差值分别为数据的差值分别为和
[0023][0024][0025][0026]
多维度mse函数:
[0027][0028]
其中,n为模型中无人机航迹点的数量;
[0029]
利用梯度反向传播的方法实现α的最小化,
[0030]
每次训练过程中随机选取一个广播时刻作为模型训练数据的起点,然后将包括起点在内的n个连续的航迹点作为模型的输入数据,输入数据之后的2个广播时刻的航迹点作为预测数据,训练结束后得到初始低空空域无人机航迹预测模型pre1。
[0031]
与现有技术相比,本发明具有以下优点:
[0032]
本发明充分利用了ads-b在获取无人机飞信态势信息中的灵活性与实时性优势。
ads-b是应用在通航飞机上的一种通用位置信息获取手段,具有信息更新频率快,建站成本低,定位精度高等技术优势。在该发明中,我们利用ads-b作为无人机的定位数据源,因此,地面基站对无人机飞行状态的实时性掌控能力将得到提高。
[0033]
本发明充分利用lstm在处理时序数据时,性能相较于其他神经网络具有更好的精度和善于学习到时序数据间的隐藏关系。并且在学习完训练集后,相较于直接对新获取的航迹数据利用模型进行预测,循环利用lstm对模型进行新一轮的更新,在整个预测过程中实现模型的自适应修正,大大提高了预测模型对被跟踪无人机航迹的预测精度,优化了系统性能。
附图说明
[0034]
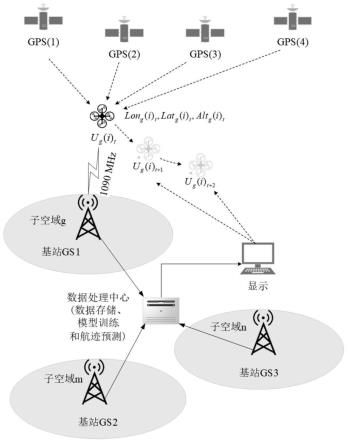
图1为本发明中低空空域内基于ads-b的无人机航迹监视系统组成;
[0035]
图2为本发明中所提出的算法流程图;
[0036]
图3为低空空域内基于ads-b的无人机航迹监视系统内真实航迹与预测航迹对比示意图;
[0037]
图4为图3中被跟踪无人机航迹的三维平均航迹预测误差。
[0038]
图5为本发明中提出的算法与其他机器学习算法的预测误差对比。
[0039]
图6为图5中各测试集使用本发明提出的算法与其他机器学习算法的预测误差对比。
具体实施方式
[0040]
下面结合说明书附图和实施例对本发明技术方案做进一步的详细说明,本发明的实施方式包括但不限于下列实施例。
[0041]
图1为低空空域内基于ads-b的无人机航迹监视系统。该系统将整个无人机的活动空域划分为若干个子空域,每个子空域由一个ads-b地面站通过ads-b in系统接收子空域内各无人机机载ads-b out系统广播出的无人机飞行态势信息,各子空域内的地面基站接收到的无人机飞行态势传送给负责管制整个空域的数据处理中心,按照接收的顺序进行进一步的存储、训练和预测。
[0042]
图3利用rlstm算法对低空空域内一条被监视的无人机航迹进行预测,在仿真中,我们利用当前及之前ads-b广播时刻的无人机航迹点数据进行训练并对预测模型进行更新,然后利用当前及之前15个ads-b广播时刻的无人机态势数据作为模型的输入数据,预测当前时刻之后的2个ads-b广播时刻的无人机航迹数据。当接收到新航迹之后重复训练更新预测的过程,直到不再接收被监视无人机的航迹数据。
[0043]
图4利用rlstm算法对低空空域内一条被监视的无人机航迹进行预测,在仿真中,由于训练窗口设置为15,预测窗口设置为2,因此从第15个ads-b广播时刻之后开始计算每个广播时刻的三维平均预测误差。在无人机航迹预测的过程中,预测精度是判断所用预测方法好坏的决定性指标。由于无人机在运动过程中涉及经度、纬度、高度三个维度的变化,因此预测精度相应的分为纬度预测精度j(x)
t
、经度预测精度j(y)
t
、高度预测精度j(z)
t
和三维预测精度误差j(3d)
t
:
[0044]
[0045][0046][0047][0048]
其中,lat
g(i)t
、lon
g(i)t
和alt
g(i)t
分别为预测模型的纬度、经度和高度值,分别为预测模型的纬度、经度和高度值,分别为预测模型反归一化后对应的预测值。图4中的三维平均预测误差为t时刻对预测窗口的t 1和t 2时刻预测数据的误差求平均,即:
[0049][0050]
图5利用各种不同的机器学习算法与本发明中所提出的rlstm算法进行对比。由图5可知,本发明提出的rlstm算法在对测试集数据进行预测的平均误差低于作为对比算法的rnn、lstm、bi-lstm和mlp。rlstm作为最优算法,在测试集中的平均预测误差相比于次优的rnn算法,平均误差小7.42米,优势突出,且rlstm在测试集中的平均预测误差为6.14米,符合无人机在低空空域的可用度预期。
[0051]
图6利用各种不同的机器学习算法与本发明中所提出的rlstm算法进行对比,并计算每一个测试集数据的平均预测误差。由图6可知,对于预测误差较大的第一、第三和第四个航迹数据,其他预测误差均远高于rlstm,且测试集无人机平均预测误差中,rlstm的趋势较为平稳,预测稳定性较于其他机器学习算法更高。
[0052]
本实施例一种低空无人机监视和航迹预测方法,步骤如下:
[0053]
步骤1,子空域g内无人机i通过4颗gps卫星进行定位得到当前时刻t无人机i的位置信息:
[0054]
假设无人机i定位过程中使用的卫星分别为s1,s2,s3,s4,则定位过程中通过下式解算出无人机当前的定位位置。
[0055]
(x
a-xu)2 (y
a-yu)2 (z
a-zu)2=c2·
(t
u-ta)2=s
a2
[0056]
其中xa为卫星a经度;xu为卫星a纬度;za为卫星a高程;ta是卫星a发出信号的时刻;xu为用户经度;yu为用户纬度;zu为用户高程;tu使用户接收信号的时刻;c为光速;sa为用户u至卫星a的距离。
[0057]
步骤2,将步骤1中无人机i接收到的位置信息ug(i),利用机载ads-b out在广播时刻t向子空域g内广播飞行态势信息u
g(i)t
:
[0058]ug(i)t
=(lat
g(i)t
,lon
g(i)t
,alt
g(i)t
)
[0059]
步骤3,将步骤2中广播出去的ads-b信息,通过子空域g内负责ads-b信息接收的地面基站bsg接收。
[0060]
步骤4,将步骤3中地面基站bs接收到的ads-b信息发送给管制中心。
[0061]
步骤5,将步骤4中发送给管制中心的信息,按照无人机的编号把航迹数据进行按ads-b广播时刻的先后按序存储为航迹数据dug(i)等待后续预测监视。
[0062]
dug(i)=(ug(i)1,ug(i)2,...,u
g(i)t
)
[0063]
步骤6,将子空域g内已存储的无人机航迹数据集作为训练数据进行训练得到预测
航迹模型pre1。
[0064]
首先将数据处理中心已经存储的空域g内各无人机航迹数据作为模型的初始训练集。
[0065]
无人机由于其自身能源储备的限制导致飞行的范围十分有限,这会导致经纬度数据将在很小的范围内变化,这会导致使用lstm训练时梯度下降缓慢,对预测带来消极的影响,解决办法是在将时序数据输入lstm模型训练之前进行ads-b数据的预处理,采用的方法是均值归一化:
[0066][0067][0068][0069]
其中μ为均值,σ为标准差,分别为纬度,精度和高度在t时刻经过均值归一化后的数据。将经过均值归一化后的无人机航迹数据和输入到训练模型中进行训练得到相对应的归一化预测航迹数据和归一化纬度、经度和高度的预测值与归一化输入数据的差值分别为和
[0070][0071][0072][0073]
由于每个预测航迹点可能会存在三个方向上精度水平不相同的情况,如更好的经纬度预测,更糟糕的高度预测。因此需要一个能全面考虑到航迹点预测精度水平的一个整体性评价指标。结合上式,我们选择同时考虑到全部预测结果和三维位置参数的多维度mse函数:
[0074][0075]
为了使预测方法达到最好,需要使上式中的预测误差α函数最小化。因此,在lstm的基础上,提出rlstm作为无人机航迹预测的方法,利用梯度反向传播的方法实现α的最小化。
[0076]
每次训练过程中随机选取一个广播时刻作为模型训练数据的起点,然后将包括起点在内的15个连续的航迹点作为模型的输入数据,输入数据之后的2个广播时刻的航迹点作为预测数据,训练结束后得到初始低空空域无人机航迹预测模型pre1。
[0077]
步骤7,取步骤6中得到的预测模型pre1,并使用已接收的待预测航迹dug(i)的数据对pre1进行训练,设置随机训练的次数为100次,利用反向传播算法较小步骤6中的α并更新得到预测模型pre2。
[0078]
步骤8,取步骤7中的预测模型pre2,对待预测航迹dug(i)进行预测,并通过反归一化得到未来两个广播时刻t 1和t 2的预测经度、纬度和高度数据。
[0079]
步骤9,取步骤7中的预测模型pre2,并重复进行预测直到航迹结束。
[0080]
上述实施例仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和等同替换,这些对本发明权利要求进行改进和等同替换后的技术方案,均落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。