技术特征:
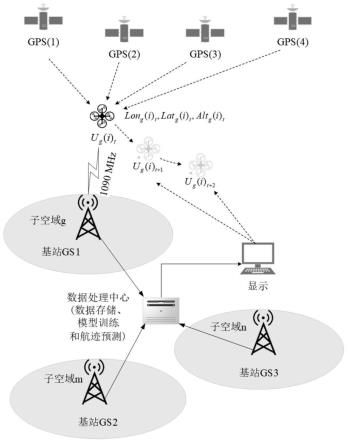
1.一种低空无人机监视和航迹预测方法,其特征在于:包括以下步骤:步骤1,将空域划分为若干子空域,子空域由一个总控制站进行无人机监视,每个子空域配备有一个ads-b地面基站,每个子空域中有n架无人机,子空域g内无人机i通过若干颗gps卫星进行定位得到当前时刻t无人机i的位置信息;步骤2,将步骤1中无人机i接收到的位置信息u
g
(i),利用机载ads-b out在广播时刻t向子空域g内广播飞行态势信息u
g
(i)
t
;步骤3,将步骤2中广播出去的ads-b信息,通过子空域g内负责ads-b信息接收的地面基站bs
g
接收;步骤4,将步骤3中地面基站bs接收到的ads-b信息发送给管制中心;步骤5,将步骤4中发送给管制中心的信息,按照无人机的编号把航迹数据进行按ads-b广播时刻的先后按序存储为无人机航迹du
g
(i)等待后续预测监视;步骤6,将子空域g内已存储的无人机航迹数据集作为训练数据进行训练得到预测航迹模型pre1;步骤7,将步骤6中得到的预测模型pre1,并使用已接收的无人机航迹du
g
(i)的数据对pre1进行训练并更新得到预测模型pre2;步骤8,取步骤7中的预测模型pre2,对待预测航迹进行预测得到未来两个广播时刻t 1和t 2的预测数据;步骤9,在广播时刻t 1,取预测模型pre2,对待预测航迹进行预测得到未来两个广播时刻t 2和t 3的预测数据;如此重复进行预测直到航迹结束。2.根据权利要求1所述的一种低空无人机监视和航迹预测方法,其特征在于:每架无人机的飞行数据u=(lat,lon,alt),其中lat为纬度,lon为经度,alt为高度。3.根据权利要求1所述的一种低空无人机监视和航迹预测方法,其特征在于:子空域g内无人机i通过4颗gps卫星进行定位得到当前时刻t无人机i的位置信息。4.根据权利要求1所述的一种低空无人机监视和航迹预测方法,其特征在于:步骤6中,训练得到预测航迹模型pre1的具体方法为:首先将管制中心已经存储的空域g内各无人机航迹数据作为模型的初始训练集;在将数据输入lstm模型训练之前进行ads-b数据的预处理,采用的方法是均值归一化:b数据的预处理,采用的方法是均值归一化:b数据的预处理,采用的方法是均值归一化:其中,和分别为输入航迹纬度,经度和高度的均值,和分别为输入航迹纬度,经度和高度的标准差,lat
g
(i)
t
,lon
g
(i)
t
,alt
g
(i)
t
分别为无人机i在t时刻纬度,经度和高度,分别为无人机i在t时刻纬度,经度和高度经过均值归一化后的数据;将经过均值归一化后的无人机
航迹数据航迹数据和输入到训练模型中进行训练得到相对应的归一化预测航迹数据测航迹数据和归一化纬度、经度和高度的预测值与归一化输入数据的差值分别为数据的差值分别为和和和和多维度mse函数:其中,n为模型中无人机航迹点的数量;利用梯度反向传播的方法实现α的最小化,每次训练过程中随机选取一个广播时刻作为模型训练数据的起点,然后将包括起点在内的n个连续的航迹点作为模型的输入数据,输入数据之后的2个广播时刻的航迹点作为预测数据,训练结束后得到初始低空空域无人机航迹预测模型pre1。
技术总结
本发明提出了一种低空空域内的无人机监视方法并提供了一种低空无人机监视系统中基于LSTM的无人机航迹预测方法:RLSTM(Recurrent-LSTM),属于航迹预测领域,其在通过无人机载ADS-B OUT发送定位数据,地面基站的ADS-B IN接收定位信息后将数据发送给数据处理中心,数据中心对得到的数据进行训练和预测,得到未来两个ADS-B广播时刻的预测航迹,相比于传统的LSTM和RNN等算法具有更高的预测精度。本发明的技术方案中,利用RLSTM对无人机ADS-B飞行数据进行训练和预测,在每一次预测过程中将之前已经接收到的航迹数据进行训练得到新的预测模型,并将预测结果发送给空管部门进行后于跟踪和预警。门进行后于跟踪和预警。门进行后于跟踪和预警。
技术研发人员:董超 张仪凡 贾子晔 张磊 吴启晖
受保护的技术使用者:南京航空航天大学
技术研发日:2022.08.01
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。