1.本发明涉及无人驾驶领域,特别涉及一种基于无人驾驶的路面靶区快速分割定位方法。
背景技术:
2.随着人工智能技术的快速发展,车辆的无人驾驶技术也越来越被广泛引用。一般情况下,对于长远路段,有人驾驶车辆行驶时间过长,会导致人出现疲劳,影响旅途状态,甚至会造成车祸,而无人驾驶则可以很好解决这个问题,然而,在现有一般无人驾驶领域,路径规划都是相对固定的,有的使用无人机来采集实时路况,以便提高路径规划的合理性,然而,此时的规划的路径一般都是固定好的,发送到车载地图后路径一般不会更改。
3.还有的情况下,有些司机因对车辆的操作习惯不同,且行车习惯也因人而异,很多时候会造成车辆耗电过高,不仅影响后续车程,导致需要过早充电,有的还会造成车辆损耗严重,降低车载电池寿命。
技术实现要素:
4.本发明的目的就是提供一种基于无人驾驶的路面靶区快速分割定位方法,能够基于实时道路情况计算最优行驶路径,并保证无人驾驶的车辆电池损耗为最优损耗,大大降低了车辆在无人驾驶时的电池能耗,并保证了车辆快速通过无人驾驶路段。
5.本发明解决其技术问题,采用的技术方案是:
6.基于无人驾驶的路面靶区快速分割定位方法,包括如下步骤:
7.s1.获取车辆在无人驾驶模式时的行驶区段,并划定行驶车道;
8.s2.基于所述行驶区段计算第一规划路径;
9.s3.实时计算所述行驶区段的拥堵程度,并根据拥堵程度将所述行驶区段划分为第一拥堵子行驶区段、第二拥堵子行驶区段和不拥堵子行驶区段;
10.s4.划定车辆在无人驾驶模式时按所述第一规划路径在各个子行驶区段行驶时的路面靶区;
11.s5.实时计算车辆在无人驾驶模式时在靶区内各行驶车道的行驶阻力;
12.s6.结合车辆在无人驾驶模式时的能耗情况计算各个路面靶区内的最优行驶车道、最优超车时间点和在最优行驶车道的最优行驶速度,得到实时的第二规划路径;
13.s7.车辆在无人驾驶模式时按所述实时的第二规划路径行驶;
14.s8.实时测定车辆在无人驾驶模式时的位置,并重复执行步骤s3-s7,直至驶离所述行驶区段。
15.进一步的是,步骤s1中,在车辆进入无人驾驶模式之前,获取车辆在无人驾驶模式时的行驶区段的路面图像信息,并结合车辆所处位置,实时判断在车辆进入无人驾驶模式时的行驶区段是否需要调整,若不需要调整,则在车辆进入行驶区段时切换为无人驾驶模式,否则,根据车辆在无人驾驶模式时的目的地位置和车辆当前所处位置重新规划行驶区
段。
16.进一步的是,步骤s1中,所述划定行驶车道是指:
17.根据车辆在无人驾驶模式时的行驶区段的路面图像信息判断行驶车道中是否存在行驶车道,若不存在,则根据所述行驶区段的行车方向性质将行驶区段的路面进行车道划定,若存在,则以存在的行驶车道作为划定的行驶车道。
18.进一步的是,当根据所述行驶区段的行车方向性质将行驶区段的路面进行车道划定时,若行驶区段的路面仅能容纳单个车辆行驶,则在路面中划定出一个单行车道;
19.若行驶区段的路面能容纳多个车辆行驶,则在路面中均匀划定出多个等距的平行车道,当行车方向性质为单向行驶时,车辆在无人驾驶模式时可调换行驶方向,当行车方向性质为双向行驶时,车辆在无人驾驶模式时不可调换行驶方向。
20.进一步的是,步骤s2和s3之间还包括如下步骤:车辆在进入所述行驶路段的入口时切换为无人驾驶模式,并按所述第一规划路径行驶。
21.进一步的是,步骤s3具体包括如下步骤:
22.s301.获取所述行驶区段的路面图像,并将路面图像中的每个车辆作为一个节点;
23.s302.根据行驶区段的不同路段的行驶速度标准将节点进行归类,然后同时进入步骤s303、s304和s305;
24.s303.若在一个路段中,节点之间的分布距离小于等于规定距离一,同时,节点的通行速度低于该路段中行驶速度标准的20%,且预计通过时间大于等于规定通行时间的20%,则判定该路段为第一拥堵子行驶区间;
25.s304.若在一个路段中,节点之间的分布距离大于规定距离一且小于等于规定距离二,同时,节点的通行速度低于该路段中行驶速度标准的10%且高于20%,且预计通过时间大于规定通行时间的10%,则判定该路段为第二拥堵子行驶区间;
26.s305.若在一个路段中,节点之间的分布距离大于规定距离二,同时,节点的通行速度不低于该路段中行驶速度标准的10%,且预计通过时间不大于规定通行时间的10%,则判定该路段为不拥堵子行驶区间。
27.进一步的是,步骤s4具体包括如下步骤:
28.s401.获取所述行驶区段的路面图像,并判断各个子行驶区间是否有车祸发生,若有车祸发生,则进入步骤s402,否则进入步骤s403;
29.s402.以车祸发生位置为中心点,并在行驶方向上在中心点后的规定距离为长边,以中心点所占车道的总车道宽度为短边,划定第一靶区;
30.s403.在规定时间段一内,若所有车道中均存在车辆并行,且不满足超车条件,则在各个子行驶区段内将不满足超车条件的行驶区段划定为第二靶区。
31.进一步的是,步骤s5具体包括如下步骤:
32.s501.获取车辆在无人驾驶模式时的车辆重力和车辆当前速度;
33.s502.获取车辆在当前速度下的风向、风力等级、环境温度和周围环境中含杂质等级,计算行驶中风阻力;
34.s503.获取车辆在无人驾驶模式时所在车道的路面情况、车胎材质、车胎胎压和车胎损耗情况,并计算行驶中路面阻力,所述路面情况包括路面材质、路面平滑度、路面含杂质物情况和路面干湿度;
35.s504.将风阻力与路面阻力相加,得到行驶阻力。
36.进一步的是,当所述行驶区段内出现极端情况时,直接将车辆切换为有人驾驶模式。
37.进一步的是,所述极端情况包括:滑坡、泥石流、风力等级大于7级、能见度低于5米和第一靶区在规定时间段二内得不到处理且影响超车。
38.本发明的有益效果是:通过上述基于无人驾驶的路面靶区快速分割定位方法,通过实时计算第一规划路径中行驶区段的拥堵程度,根据拥堵程度将行驶区段划分为各个子行驶区段,再为无人驾驶的车辆在行驶区段中行驶时划定路面靶区,根据靶区的不同计算车辆的行驶阻力,再结合车辆在无人驾驶模式时的能耗情况计算各个路面靶区内的最优行驶车道、最优超车时间点和在最优行驶车道的最优行驶速度,得到实时的第二规划路径,能够保证无人驾驶的车辆始终保持在最优的行驶路径中行驶,并能够保证无人驾驶的车辆电池损耗为最优损耗,不仅能够保证车辆快速通过无人驾驶路段,还能大大降低车辆在无人驾驶时的电池能耗。
附图说明
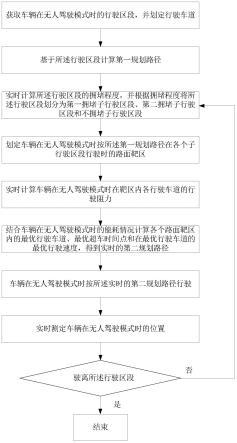
39.图1为本发明基于无人驾驶的路面靶区快速分割定位方法的流程图。
具体实施方式
40.下面结合附图,详细描述本发明的技术方案。
41.本发明提出的是一种基于无人驾驶的路面靶区快速分割定位方法,其流程图见图1,其中,该方法包括如下步骤:
42.s1.获取车辆在无人驾驶模式时的行驶区段,并划定行驶车道;
43.s2.基于所述行驶区段计算第一规划路径;
44.s3.实时计算所述行驶区段的拥堵程度,并根据拥堵程度将所述行驶区段划分为第一拥堵子行驶区段、第二拥堵子行驶区段和不拥堵子行驶区段;
45.s4.划定车辆在无人驾驶模式时按所述第一规划路径在各个子行驶区段行驶时的路面靶区;
46.s5.实时计算车辆在无人驾驶模式时在靶区内各行驶车道的行驶阻力;
47.s6.结合车辆在无人驾驶模式时的能耗情况计算各个路面靶区内的最优行驶车道、最优超车时间点和在最优行驶车道的最优行驶速度,得到实时的第二规划路径;
48.s7.车辆在无人驾驶模式时按所述实时的第二规划路径行驶;
49.s8.实时测定车辆在无人驾驶模式时的位置,并重复执行步骤s3-s7,直至驶离所述行驶区段。
50.上述方法中,步骤s1中,在车辆进入无人驾驶模式之前,获取车辆在无人驾驶模式时的行驶区段的路面图像信息,并结合车辆所处位置,实时判断在车辆进入无人驾驶模式时的行驶区段是否需要调整,若不需要调整,则在车辆进入行驶区段时切换为无人驾驶模式,否则,根据车辆在无人驾驶模式时的目的地位置和车辆当前所处位置重新规划行驶区段。这里,由于车辆在进入无人驾驶模式之前,已经规划的行驶区段可能会因为天气情况或者拥堵情况导致无人驾驶时通行受阻,甚至会因为疫情情况出现封路,因此,只要车辆还未
进入无人驾驶模式,均可以根据实际情况决定是否调整无人驾驶时的行驶区段。
51.需要说明的是,步骤s1中,所述划定行驶车道是指:
52.根据车辆在无人驾驶模式时的行驶区段的路面图像信息判断行驶车道中是否存在行驶车道,若不存在,则根据所述行驶区段的行车方向性质将行驶区段的路面进行车道划定,若存在,则以存在的行驶车道作为划定的行驶车道。
53.这里,由于有的行驶区段中本身已经有按国标划定好的行驶车道,在此情况下,车辆可以以划定好的行驶车道进行无人驾驶,而有的情况下,有的行驶区段中虽然已经划定好行驶车道,但是由于车道受损,或因长期有货运车辆导致路面有残渣,进而导致已有车道识别不清,识别不准,所以需要重新划定行驶车道,还有的行驶区段中的车道,由于车道是新建的,且相关人员还未来得及划定车道,或者本身不划定车道,此时,需要车辆根据道路情况划定行驶车道。
54.作为进一步说明的是,因车辆在无人驾驶规划路径时,考虑的是道路通行调价是否能够进行无人驾驶行车,当道路满足车辆进行无人驾驶时,其道路本身的宽窄程度,以及是否行驶方向本身并不可知,因此,本技术中,在进行车辆的无人驾驶路径规划时,需要对道路宽窄程度以及道路行驶方向等进行详细了解,以便规划出最优路径和最优行驶速度。
55.因此,当根据所述行驶区段的行车方向性质将行驶区段的路面进行车道划定时,若行驶区段的路面仅能容纳单个车辆行驶,则在路面中划定出一个单行车道,此时,道路为单车辆通过,要控制无人驾驶的车辆速度不要太高,并且要符合该道路的标准通行速度,且在天气状况不好时,进一步降低速度,保证通行安全;
56.还有一种情况,若行驶区段的路面能容纳多个车辆行驶,则在路面中均匀划定出多个等距的平行车道,当行车方向性质为单向行驶时,车辆在无人驾驶模式时可调换行驶方向,当行车方向性质为双向行驶时,车辆在无人驾驶模式时不可调换行驶方向。此时,当行车方向性质为双向行驶时,若在无人驾驶车辆的前方出现重大事故或者前方不能通行,则可以进行自动掉头,而当行车方向性质为单向行驶时,若在无人驾驶车辆的前方出现重大事故或者前方不能通行,则需要将车辆由无人驾驶模式切换为有人驾驶模式,以保证通行安全。
57.需要指出的是,步骤s2和s3之间还可以包括如下步骤:车辆在进入所述行驶路段的入口时切换为无人驾驶模式,并按所述第一规划路径行驶。这里,第一规划路径就是预先根据车辆前方状况规划出的初始路径,第一规划路径一般不是实时的,需要进行实时调整后才能作为最优选择。
58.为了能够适应拥堵程度,保证车辆在无人驾驶时节能高效的通过行驶区段,步骤s3具体可以包括如下步骤:
59.s301.获取所述行驶区段的路面图像,并将路面图像中的每个车辆作为一个节点;
60.s302.根据行驶区段的不同路段的行驶速度标准将节点进行归类,然后同时进入步骤s303、s304和s305;
61.s303.若在一个路段中,节点之间的分布距离小于等于规定距离一,同时,节点的通行速度低于该路段中行驶速度标准的20%,且预计通过时间大于等于规定通行时间的20%,则判定该路段为第一拥堵子行驶区间;
62.s304.若在一个路段中,节点之间的分布距离大于规定距离一且小于等于规定距
离二,同时,节点的通行速度低于该路段中行驶速度标准的10%且高于20%,且预计通过时间大于规定通行时间的10%,则判定该路段为第二拥堵子行驶区间;
63.s305.若在一个路段中,节点之间的分布距离大于规定距离二,同时,节点的通行速度不低于该路段中行驶速度标准的10%,且预计通过时间不大于规定通行时间的10%,则判定该路段为不拥堵子行驶区间。
64.这里,规定距离一越小,代表越拥堵,规定距离一可根据实际情况进行赋值,而当节点间分布距离相较于规定距离一稍远一些的规定距离二,其也可进行调整,规定距离二大于规定距离一;并且,行驶区段内的不同位置,其行驶速度标准可能不一致,有的是120km/h,有的是100km/h,有的是80km/h,有的是40km/h等等,因此,要根据实际区段的行驶速度标准为基础进行速度监控。
65.规定通过时间一般是指车辆在无人驾驶模式时通过子行驶区段的时间,这里,由于每个子行驶区段的长短可能不同,对应的拥堵程度也不相同,因此,车辆在无人驾驶模式时通过每个子行驶区段的时间也不相同。
66.本技术中,不仅需要对道路的正常拥堵情况进行监控,以作为无人驾驶车辆的路径规划策略,还需要考虑出现车祸等可能影响通行速度的因素,因此,步骤s4具体可以包括如下步骤:
67.s401.获取所述行驶区段的路面图像,并判断各个子行驶区间是否有车祸发生,若有车祸发生,则进入步骤s402,否则进入步骤s403;
68.s402.以车祸发生位置为中心点,并在行驶方向上在中心点后的规定距离为长边,以中心点所占车道的总车道宽度为短边,划定第一靶区;
69.s403.在规定时间段一内,若所有车道中均存在车辆并行,且不满足超车条件,则在各个子行驶区段内将不满足超车条件的行驶区段划定为第二靶区。
70.这里,靶区的划定是为了能够提前告知无人驾驶的车辆,以便提前做出路径规避,一般情况下,当出现车祸时,有的车辆导航上会有提示,而不会提供路径规划策略,这种情况下需要驾驶人员根据周围情况自行调整道路以行进速度,还有的情况,有的车辆本身就没有安装导航软件,有的安装有导航软件,导航软件也不会进行提醒,更不会进行路径规划,为此,本技术中基于提前规划路径的目的,就是考虑如果不提前规划路径,可能会将车辆的无人驾驶模式切换为有人驾驶模式,导致不能完成行驶区段,以及不提前规划路径进行靶区规避,无人驾驶车辆可能会造成更多的停留时间,并且会出现更多的缓慢行驶路段,甚至会进行更多的道路转换,最终造成车辆电池能量浪费。
71.为了能够使车辆在无人驾驶模式时处于最佳路径行驶状态,以及最佳能耗状态,为此,步骤s5具体可以包括如下步骤:
72.s501.获取车辆在无人驾驶模式时的车辆重力和车辆当前速度;
73.s502.获取车辆在当前速度下的风向、风力等级、环境温度和周围环境中含杂质等级,计算行驶中风阻力;
74.s503.获取车辆在无人驾驶模式时所在车道的路面情况、车胎材质、车胎胎压和车胎损耗情况,并计算行驶中路面阻力,所述路面情况包括路面材质、路面平滑度、路面含杂质物情况和路面干湿度;
75.s504.将风阻力与路面阻力相加,得到行驶阻力。
76.这里,车辆重力不仅仅包括车辆本身的重力,其还有乘客重力,所载人员重力以及车载物品重力等,本技术中,将所有车载人和物的重力统一称为车载重力,并且,这个车载重力是需要实时测量的,一般情况下,车载重力不会出现较大范围的变化,当出现较大范围的变化时,会发出提醒,告知正在休息的驾驶人员,以便进行下一步应对。
77.一般来说,无人驾驶的车辆在行驶过程中,其所有阻力大致可以分为两方面,一是风阻力,二是路面阻力。
78.影响风阻力的因素可以有车辆当前行驶速度、风向、风力等级、环境温度和周围环境中含杂质等级等,将这些综合因素都作为计算风阻力的因素,可以更精准得到行驶阻力,以便计算车辆电池能耗,而对于路面阻力,其影响因素一般有车辆在无人驾驶模式时所在车道的路面情况、车胎材质、车胎胎压和车胎损耗情况等,本技术中,路面情况可以包括路面材质、路面平滑度、路面含杂质物情况和路面干湿度等,综合这些因素,同样也能进一步提升行驶阻力的计算精度,从而计算出准确的车辆电池能耗。
79.需要说明的是,无人驾驶的车辆在行驶时,有可能会遇到极端情况,导致不得不将无人驾驶模式切换为有人驾驶模式,以便安全通过,即:当所述行驶区段内出现极端情况时,直接将车辆切换为有人驾驶模式,本技术中,极端情况可以包括:滑坡、泥石流、风力等级大于7级、能见度低于5米和第一靶区在规定时间段二内得不到处理且影响超车等。
80.根据本技术的上述描述,本技术中提到的规定时间段一和规定时间段二均可自由设定,以能够表征对应执行情况的时间特性即可。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。