技术特征:
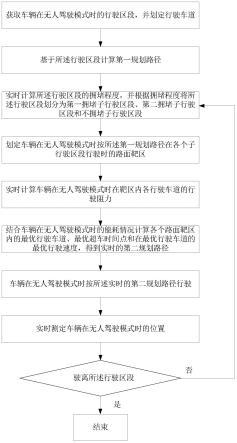
1.基于无人驾驶的路面靶区快速分割定位方法,其特征在于,包括如下步骤:s1.获取车辆在无人驾驶模式时的行驶区段,并划定行驶车道;s2.基于所述行驶区段计算第一规划路径;s3.实时计算所述行驶区段的拥堵程度,并根据拥堵程度将所述行驶区段划分为第一拥堵子行驶区段、第二拥堵子行驶区段和不拥堵子行驶区段;s4.划定车辆在无人驾驶模式时按所述第一规划路径在各个子行驶区段行驶时的路面靶区;s5.实时计算车辆在无人驾驶模式时在靶区内各行驶车道的行驶阻力;s6.结合车辆在无人驾驶模式时的能耗情况计算各个路面靶区内的最优行驶车道、最优超车时间点和在最优行驶车道的最优行驶速度,得到实时的第二规划路径;s7.车辆在无人驾驶模式时按所述实时的第二规划路径行驶;s8.实时测定车辆在无人驾驶模式时的位置,并重复执行步骤s3-s7,直至驶离所述行驶区段。2.根据权利要求1所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,步骤s1中,在车辆进入无人驾驶模式之前,获取车辆在无人驾驶模式时的行驶区段的路面图像信息,并结合车辆所处位置,实时判断在车辆进入无人驾驶模式时的行驶区段是否需要调整,若不需要调整,则在车辆进入行驶区段时切换为无人驾驶模式,否则,根据车辆在无人驾驶模式时的目的地位置和车辆当前所处位置重新规划行驶区段。3.根据权利要求2所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,步骤s1中,所述划定行驶车道是指:根据车辆在无人驾驶模式时的行驶区段的路面图像信息判断行驶车道中是否存在行驶车道,若不存在,则根据所述行驶区段的行车方向性质将行驶区段的路面进行车道划定,若存在,则以存在的行驶车道作为划定的行驶车道。4.根据权利要求3所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,当根据所述行驶区段的行车方向性质将行驶区段的路面进行车道划定时,若行驶区段的路面仅能容纳单个车辆行驶,则在路面中划定出一个单行车道;若行驶区段的路面能容纳多个车辆行驶,则在路面中均匀划定出多个等距的平行车道,当行车方向性质为单向行驶时,车辆在无人驾驶模式时可调换行驶方向,当行车方向性质为双向行驶时,车辆在无人驾驶模式时不可调换行驶方向。5.根据权利要求1所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,步骤s2和s3之间还包括如下步骤:车辆在进入所述行驶路段的入口时切换为无人驾驶模式,并按所述第一规划路径行驶。6.根据权利要求1所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,步骤s3具体包括如下步骤:s301.获取所述行驶区段的路面图像,并将路面图像中的每个车辆作为一个节点;s302.根据行驶区段的不同路段的行驶速度标准将节点进行归类,然后同时进入步骤s303、s304和s305;s303.若在一个路段中,节点之间的分布距离小于等于规定距离一,同时,节点的通行速度低于该路段中行驶速度标准的20%,且预计通过时间大于等于规定通行时间的20%,
则判定该路段为第一拥堵子行驶区间;s304.若在一个路段中,节点之间的分布距离大于规定距离一且小于等于规定距离二,同时,节点的通行速度低于该路段中行驶速度标准的10%且高于20%,且预计通过时间大于规定通行时间的10%,则判定该路段为第二拥堵子行驶区间;s305.若在一个路段中,节点之间的分布距离大于规定距离二,同时,节点的通行速度不低于该路段中行驶速度标准的10%,且预计通过时间不大于规定通行时间的10%,则判定该路段为不拥堵子行驶区间。7.根据权利要求1所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,步骤s4具体包括如下步骤:s401.获取所述行驶区段的路面图像,并判断各个子行驶区间是否有车祸发生,若有车祸发生,则进入步骤s402,否则进入步骤s403;s402.以车祸发生位置为中心点,并在行驶方向上在中心点后的规定距离为长边,以中心点所占车道的总车道宽度为短边,划定第一靶区;s403.在规定时间段一内,若所有车道中均存在车辆并行,且不满足超车条件,则在各个子行驶区段内将不满足超车条件的行驶区段划定为第二靶区。8.根据权利要求1所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,步骤s5具体包括如下步骤:s501.获取车辆在无人驾驶模式时的车辆重力和车辆当前速度;s502.获取车辆在当前速度下的风向、风力等级、环境温度和周围环境中含杂质等级,计算行驶中风阻力;s503.获取车辆在无人驾驶模式时所在车道的路面情况、车胎材质、车胎胎压和车胎损耗情况,并计算行驶中路面阻力,所述路面情况包括路面材质、路面平滑度、路面含杂质物情况和路面干湿度;s504.将风阻力与路面阻力相加,得到行驶阻力。9.根据权利要求1-8任意一项所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,当所述行驶区段内出现极端情况时,直接将车辆切换为有人驾驶模式。10.根据权利要求9所述的基于无人驾驶的路面靶区快速分割定位方法,其特征在于,所述极端情况包括:滑坡、泥石流、风力等级大于7级、能见度低于5米和第一靶区在规定时间段二内得不到处理且影响超车。
技术总结
本发明涉及无人驾驶领域,提供了一种基于无人驾驶的路面靶区快速分割定位方法,包括:获取车辆在无人驾驶模式时的行驶区段,并划定行驶车道;基于行驶区段计算第一规划路径;实时计算行驶区段的拥堵程度,并将行驶区段划分为第一拥堵子行驶区段、第二拥堵子行驶区段和不拥堵子行驶区段;划定车辆在无人驾驶模式时按第一规划路径在各个子行驶区段行驶时的路面靶区;实时计算在靶区内各行驶车道的行驶阻力;结合车辆在无人驾驶模式时的能耗情况计算各个路面靶区内的最优行驶车道、最优超车时间点和在最优行驶车道的最优行驶速度,得到实时的第二规划路径;车辆在无人驾驶模式时按实时的第二规划路径行驶;实时为车辆规划路径,直至驶离行驶区段。至驶离行驶区段。至驶离行驶区段。
技术研发人员:张世良 柳粟杰 蔡清池
受保护的技术使用者:宁德师范学院
技术研发日:2022.08.01
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。