1.本发明涉及一种用于从通过对对准标记成像而取得的图像数据中检测对准标记的技术。更具体而言,本发明涉及标记检测装置、标记学习装置、基板加工装置、标记检测方法和物品的制造方法。
背景技术:
2.例如,在使用光刻技术制造半导体器件或显示器件的曝光装置中检测上述对准标记。曝光装置经由投影光学系统将原版(诸如掩模和中间掩模)的图案投影到基板(诸如晶片和玻璃板)上并转印该图案。在同一基板上转印具有不同原版图案的多个层时,要求高度准确的对准以防止实际转印位置偏离目标转印位置。通过使用经由对对准标记成像而取得的图像数据(对准标记图像),对准检测对准标记的位置并基于结果来校正位置。
3.日本专利特许公开no.(“jp”)2003-338455公开了一种通过模板匹配来检测对准标记图像中的对准标记的位置的方法,该方法是使用与对准标记的变形对应的模板的自动变形和亮度(brightness)改变的优化方法。这种方法自学习以将优化的模板用于下一次匹配并提高对准标记的检测率。
4.但是,即使是jp 2003-338455中公开的方法也要求操作者首先手动地将对准标记位置调节到成像位置,调节多个参数(诸如成像光的波长和照度(illuminance)),并维持对准标记的良好可成像状态。此时,操作者要花时间来确定要使用的参数的组合。由于对准标记图像中的对准标记的状态根据施加到基板的抗蚀剂的物理特性而改变,因此操作者需要足够的知识来确定组合。
5.一些曝光装置可以自动调节参数,但是这种类型的曝光装置自动且顺序地改变参数的组合并确定组合是否合适。因此,确定要使用的参数的组合要花长的时间。
技术实现要素:
6.本发明提供了对准标记检测装置等,其能够自动且快速地调节与成像相关的参数以取得良好的对准标记图像。
7.根据本发明的一个方面的标记检测装置包括:成像单元,被配置成通过对物体上的对准标记成像来生成对准标记图像;检测单元,被配置成检测对准标记图像中的对准标记;以及调节单元,被配置成基于如下的学习模型来调节与成像相关的参数,所述学习模型是通过使用其中不能检测到对准标记的对准标记图像和作为用于对其中能够检测到对准标记的对准标记图像成像的参数的第一参数进行学习而生成的。调节单元取得作为基于学习模型的推断处理的结果的第二参数。成像单元在参数被调节为第二参数的状态下执行成像。与上述标记检测装置对应的标记检测方法以及各自使用上述标记检测装置的基板加工装置和物品的制造方法也构成本发明的其他方面。
8.根据本发明的另一方面的标记学习装置包括:取得单元,被配置成取得作为通过对物体上的对准标记成像而生成的、其中不能检测到图像中的对准标记的图像的对准标记
图像,以及作为在其中能够检测到对准标记的对准标记图像的成像中的与成像相关的参数的第一参数;以及学习单元,被配置成生成与推断处理一起使用的学习模型,该学习模型通过使用所取得的对准标记图像和第一参数进行学习来输出作为参数的第二参数。
9.本发明的其他特征将从以下参考附图对示例性实施例的描述中变得清楚。
附图说明
10.图1是图示根据第一实施例的标记检测装置的配置的框图。
11.图2图示了根据第一实施例的要调节的参数与调节单元之间的关系。
12.图3是图示根据第一实施例的参数推断处理的流程图。
13.图4图示了具有不同观察光照度的对准标记图像。
14.图5图示了在观察视场中具有不同对准标记位置的对准标记图像。
15.图6是图示根据第一实施例的参数学习处理的流程图。
16.图7图示了根据第二实施例的学习共享服务器的网络配置。
17.图8图示了包括根据第一实施例的标记检测装置的曝光装置的配置。
具体实施方式
18.现在参考附图,将给出根据本发明的实施例的描述。
19.第一实施例
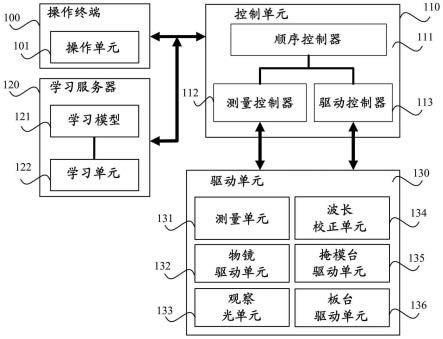
20.图1图示了根据第一实施例的曝光装置中的与对准标记测量相关的配置(标记检测装置)。曝光装置包括操作终端100、控制单元110、学习服务器120和驱动单元130。控制单元110中的顺序控制器111根据来自由操作者操作的操作终端100的命令向测量控制器112和驱动控制器113分别发出测量和驱动指令,并执行顺序控制。
21.测量控制器112与驱动单元130通信以控制驱动单元130中的测量单元131、观察光单元133和波长校正单元134。作为成像单元的测量单元131在观察视场(成像区域)中对在诸如掩模或板(基板)之类的物体上提供的对准标记成像并且生成对准图像。观察光单元133包括具有彼此不同波长的多个光源,诸如led。波长校正单元134控制来自掩模或板的反射光以校正要由测量单元131成像的光的波长。
22.驱动控制器113与驱动单元130通信以控制驱动单元130中的物镜驱动单元132、掩模台驱动单元135和板台驱动单元136。物镜驱动单元132移动物镜以通过曝光将掩模图案转印到板上。掩模台驱动单元135和板台驱动单元136分别移动支撑掩模和板的台。
23.操作终端(操作单元)100包括操作单元101,该操作单元101使得能够调节与用于取得对准标记图像的成像相关的多个参数,并且根据操作者对操作单元101的操作来调节参数。与成像相关的多个参数是值,并且当参数改变时,对准标记图像中的对准标记的状态(诸如亮度、对比度和位置)改变。
24.学习服务器(对准标记学习装置)120包括用于取得(推断)合适参数的组合的学习模型121,以及用于更新学习模型121的学习单元122。
25.在调节图2中所示的参数并设置成像条件之后,由测量单元131执行曝光装置中的用于取得对准标记图像的成像。更具体而言,通过驱动物镜驱动单元132、掩模台驱动单元135和板台驱动单元136来调节测量单元131的观察视场中的对准标记的位置。在成像期间,
观察视场内被观察光照亮。通过在观察光单元133中将当前光源切换到具有不同波长的其他光源、通过调节部署在观察光路径上的孔径光阑(光圈)以切出(cut out)在特定波长带中的光、以及通过使用波长校正单元134抑制镜面反射光,调节观察光的波长。通过增大或减小输入到观察光单元133中的光源的电流值以改变发光量来调节观察光的照度。
26.图3的流程图图示了使用学习模型121来推断合适的参数组合的推断处理,该学习模型121接收通过测量单元131的成像而获得的对准标记图像的输入。包括计算机的控制单元110(包括顺序控制器111、测量控制器112和驱动控制器113)根据计算机程序执行这个处理。控制单元110与检测装置和调节单元对应。
27.首先,顺序控制器111向测量控制器112和驱动控制器113发出命令以测量对准标记的位置。作为响应,驱动控制器113取得由操作终端100预先保持的参数的组合(下文中称为初始参数)并将它们设置到驱动单元130中的各单元。由此,对准标记位置移动到观察视场内或观察视场外的与初始参数对应的位置,并且根据初始参数设置来自观察光单元133的观察光的波长和照度。
28.在步骤s300中,测量控制器112使测量单元131对对准标记成像。此处通过成像获得的对准标记图像被设置为第一对准标记图像。
29.在步骤s301中,顺序控制器111将第一对准标记图像输入到学习服务器120中的学习模型121。学习模型121输出合适的参数(第二参数:下文中称为推断参数)的组合作为推断结果。
30.学习模型121是通过使用过去测量失败的各种对准标记图像和用于对测量成功的对准标记图像成像的参数(第一参数)的机器学习而生成的。但是,学习模型121不是必须在根据这个实施例的曝光装置中生成,它可以是由其他曝光装置生成的学习模型或者使用从外部取得的对准标记图像和参数的日志生成的学习模型。
31.可以使用例如卷积神经网络来执行机器学习。卷积神经网络是具有输入层、卷积层、池化层、全连接层和输出层的算法,其接受图像的输入,并输出一个推断结果。这个实施例讨论使用卷积神经网络的学习模型121,但是学习模型121可以用其他模型或算法生成。
32.在步骤s302中,顺序控制器111将从学习模型121输出的推断参数的组合通过测量控制器112和驱动控制器113应用到驱动单元130中的各单元。由此,与成像相关的各参数被调节为推断参数。
33.然后,在应用了推断参数之后的步骤s303中,顺序控制器111通过测量控制器112使测量单元131再次对对准标记成像。通过成像获得的对准图像被设置为第二对准标记图像。
34.图4图示了第一对准标记图像和第二对准标记图像的示例。在通过初始参数设置的观察光的照度低至例如20%的情况下,获得亮度不足或对比度低的第一对准标记图像400。当通过应用经由将第一对准标记图像400输入到学习模型121中获得的推断参数而使观察光的照度高达例如70%时,获得具有高亮度或高对比度的第二对准标记图像401。
35.图5图示了第一对准标记图像和第二对准标记图像的另一个示例。在由初始参数设置的对准标记至少部分地位于观察视场外的情况下,获得至少其一部分缺失的第一对准标记图像500。当第一对准标记图像500被输入到学习模型121时,板台驱动量作为推断参数被输出。当板台驱动单元136以这个板台驱动量驱动安装有板的板台时,对准标记位于观察
视场的中心。由此,获得对准标记位于中心的第二对准标记图像501。
36.在步骤s304中,顺序控制器111测量第二对准标记图像中的对准标记的位置。然后,在步骤s305中,顺序控制器111确定测量是否成功(换句话说,是否检测到对准标记)。在已成功测量到对准标记位置的情况下,终止推断处理。在对准标记位置的测量不成功(失败)的情况下,流程前进到下面描述的学习处理。
37.这个实施例可以通过使用接受对准标记图像的输入的学习模型来自动且快速地调节与成像相关的参数以取得良好的对准标记图像。此外,这个实施例可以通过使用良好的对准标记图像来以高精度定位掩模或板。
38.图6的流程图图示了学习处理(学习模型生成方法)。在本描述中,学习处理是在使用通过推断处理获得的推断参数的组合进行成像而获得的第二对准标记图像中的对准标记位置的测量不成功的情况下执行的。执行学习处理的情况不限于这种情况。
39.首先,在步骤s600中,顺序控制器111根据预定的调节过程自动调节使得能够进行测量的参数的组合。此时,顺序控制器111在通过测量和驱动控制器112和113根据预定规则驱动物镜驱动单元132、观察光单元133和波长校正单元134的同时搜索使得能够进行测量的参数的组合。在这个步骤中,顺序控制器111可以取得由操作者通过操作单元101输入的参数的组合。
40.接下来,在步骤s601中,顺序控制器111通过测量和驱动控制器112和113将在步骤s600中获得的参数的组合应用于驱动单元130中的各单元,以使测量单元131对对准标记成像。
41.接下来,在步骤s602中,顺序控制器111测量通过成像获得的对准标记图像中的对准标记的位置。然后,在步骤s603中,顺序控制器111确定测量是否成功。在测量成功的情况下,顺序控制器111在步骤s604中使学习单元122更新学习模型121。学习单元122与取得单元和学习单元对应。
42.在学习模型121的更新中,顺序控制器111使学习单元122以测量失败的第一对准标记图像和在前述步骤s602中使测量成功的参数的组合(下文中称为成功参数)作为输入来进行学习。例如,当学习是使用卷积神经网络的机器学习时,可以应用误差反向传播方法。
43.使用卷积神经网络的机器学习将成功参数的组合设置为真值(ground truth)数据,并将用学习模型121获得的推断参数的组合设置为输出数据。它调节神经元之间的权重,以减小真值数据与输出数据之间的误差。真值数据与输出数据之间的误差可以使用由以下表达式(1)表示的平方和误差或由表达式(2)表示的交叉熵误差。在各表达式中,e是误差值,y是输出数据值,并且t是正确的数据值。
[0044][0045]
e=-∑ktklog ykꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0046]
此时,使用在推断处理中取得的第一对准标记图像来更新学习模型121。
[0047]
在步骤s602中对准标记的测量不成功(失败)的情况下,流程返回到步骤s600以重复上述处理。
[0048]
这个实施例输入对准标记图像并且可以自动地或以对于操作者而言的小负担优
化用于推断成像参数的学习模型。
[0049]
这个实施例已应用于作为基板加工装置的曝光装置,该曝光装置对通过使用由标记检测装置检测到的对准标记而定位的基板进行曝光并在基板上形成图案,但这个实施例可应用于其他基板加工装置。例如,这个实施例也适用于使用模具在基板上形成由压印材料制成的图案的压印装置,或者诸如将带电粒子束照射到基板上并在基板上形成图案的绘制装置之类的基板加工装置。这个实施例也适用于诸如涂布机和显影器之类的基板加工装置,涂布机用于将感光介质涂覆到基板的表面上,显影器用于对其上转印有图案的感光介质进行显影。这个实施例还适用于诸如成膜装置(诸如cvd装置等)、加工装置(诸如激光加工装置)、检查装置(诸如覆盖检查装置等)和测量装置(诸如标记测量装置)之类的基板加工装置。
[0050]
图8图示了曝光装置10的配置。曝光装置10经由投影光学系统(物镜)14将掩模m的图案的图像投影到作为基板的板w上以使板w曝光。板w和掩模m设有由标记检测装置检测的对准标记。
[0051]
z轴方向被设置为与投影光学系统14的光轴平行的方向并且x轴方向和y轴方向被设置为在与z轴方向垂直的平面内彼此正交的两个方向。θx、θy、θz分别被设置为绕x轴的旋转、绕y轴的旋转和绕z轴的旋转。
[0052]
曝光装置10包括光源11、照明光学系统12、掩模台13、投影光学系统14、板台15和主控制单元16。曝光装置10包括用于驱动掩模台13的掩模台驱动单元21(图1中的135)和用于驱动投影光学系统14中的透镜(光学元件)14a的物镜驱动单元22(图1中的132)。曝光装置10包括用于驱动板台15的板台驱动单元51(图1中的136)。掩模台驱动单元21、物镜驱动单元22和板台驱动单元51分别由包括在如图1中所示的测量控制器112中的掩模台控制单元31、透镜控制单元32和板台控制单元41控制。从光源11到板台控制单元41的元件与用于对板w执行加工(通过曝光形成图案)的加工单元对应。
[0053]
主控制单元16控制曝光装置10的整体操作,并且包括图1中所示的控制单元110和学习服务器120。图1中所示的操作终端100连接到主控制单元16。
[0054]
光源11发射曝光光。照明光学系统12使用从光源11发射的光来照亮掩模m。掩模台13保持掩模m并通过掩模台驱动单元21在与投影光学系统14的光轴正交的xy平面内移动。投影光学系统14将由照明光学系统12照亮的掩模m的图案的图像投影到板w上。投影光学系统14包括通过物镜驱动单元22而在x轴方向上可移动的透镜14a。板台15保持板w并通过板台驱动单元51在xy平面内平移或θz旋转。
[0055]
主控制单元16根据由标记检测装置检测到的对准标记位置的测量结果,经由掩模台控制单元31、透镜控制单元32和板台控制单元41来控制掩模台驱动单元21、物镜驱动单元22和板台驱动单元51。由此,掩模m和板w定位在xy平面中。
[0056]
曝光装置10适于制造物品,诸如微型器件,例如半导体器件、具有精细结构的器件和平板显示器。用于制造物品的方法包括使用曝光装置10加工基板以及从在加工步骤中加工的基板制造物品的步骤。制造方法可以包括众所周知的步骤(诸如曝光、氧化、成膜、气相沉积、掺杂、平坦化、蚀刻、抗蚀剂剥离、划片、接合和封装)。使用曝光装置10制造物品的方法在物品的性能、质量、生产率和生产成本中的至少一个方面比常规方法更有利。
[0057]
第二实施例
[0058]
图7图示了根据第二实施例的网络配置。曝光装置701与其它曝光装置一起经由网络连接到学习共享服务器700。
[0059]
在第一实施例中,使用单个曝光装置(701)中的学习模型取得推断参数或更新学习模型。另一方面,这个实施例将包括曝光装置701在内的多个曝光装置连接到学习共享服务器700,并使用学习共享服务器700中的学习模型取得推断参数并更新学习模型。即,学习模型由多个曝光装置共享。
[0060]
通过在多个曝光装置之间共享学习模型,即使对于尚未学习的新安装的曝光装置,也可以使用学习模型来取得推断参数。通过使用由多个曝光装置获得的对准标记图像和成功参数进行学习,可以进一步提高学习精度。
[0061]
学习共享服务器700可以安装在安装有曝光装置的工厂的内部或外部。同一个学习共享服务器700可以通过网络被多个工厂的曝光装置使用。
[0062]
其它实施例
[0063]
本发明的(一个或多个)实施例也可以由系统或装置的计算机实现,其中计算机读出并执行记录在存储介质(其也可以被更完整地称为“非瞬时性计算机可读存储介质”)上的计算机可执行指令(例如,一个或多个程序)以执行一个或多个上述实施例的功能,和/或计算机包括用于执行一个或多个上述实施例的功能的一个或多个电路(例如,专用集成电路(asic)),并且也可以由系统或装置的计算机通过例如从存储介质中读出并执行计算机可执行指令以便执行一个或多个上述实施例的功能和/或控制一个或多个电路执行一个或多个上述实施例的功能所执行的方法来实现。计算机可以包括一个或多个处理器(例如,中央处理单元(cpu)、微处理单元(mpu))并且可以包括独立计算机或独立处理器的网络来读出和执行计算机可执行指令。计算机可执行指令可以从例如网络或存储介质中提供给计算机。存储介质可以包括例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的储存装置、光盘(诸如压缩盘(cd)、数字多样化盘(dvd)或蓝光盘(bd)
tm
)、闪存设备、存储卡等等当中的一种或多种。
[0064]
其它实施例
[0065]
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
[0066]
通过使用接受对准标记图像的输入的学习模型,各实施例能够自动且快速地调节与成像相关的参数以取得良好的对准标记图像。
[0067]
虽然已经参考示例性实施例描述了本发明,但是应该理解的是,本发明不限于所公开的示例性实施例。以下权利要求的范围应赋予最广泛的解释,以涵盖所有此类修改以及等同的结构和功能。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
