1.本发明属于软件技术、仿真技术、群体智能领域,涉及一种基于三维环境态势感知的群体围猎-逃跑智能行为模拟方法。
背景技术:
2.自然界中存在着大量的群体运动现象,在动物界中,在昆虫、鸟类、鱼类以及群居动物中都广泛存在。这些动物的群体运动有着明显的特征:集群中的个体表现出较高的运动一致性,个体差异较小,且不同集群运动表现出高度的相似性。通过数学模型计算并模拟出动物集群的智能运动行为,探究动物个体智能以及群体智能在动物的群体运动行为中的作用都是动物仿生学、虚拟现实、计算机游戏和动画等领域的重要研究内容。
3.集群运动行为的研究也具有广阔的应用前景,动物集群模拟算法可直接被运用在游戏、电影等领域中;同时,生物群体中的同步、避障机制可为分布式机器人集群、无人驾驶飞行器群的控制算法提供参考。例如,通过模拟蚁群的觅食过程实现无人机的合理规划任务,使能量消耗总代价达到最小;模拟鸟群的迁徙行为,使得无人机群保持队形、借力节省能量、协同抗击敌机,从而提高无人机完成任务的效率。
4.在对不同较高级动物种群的模拟仿真中,不同种群之间的围猎-逃跑现象的模拟尤其复杂。关于群体捕猎的智能行为,gutman等人首先给出了围猎-逃跑问题的形式化描述(gutman s,esh m,gefen m.simple linear pursuit-evasion games[j].computers&mathematics with applications,1987:83-95.)。目前针对动物群体的围猎-逃跑运动模拟研究的局限性和不足体现在以下方面:
[0005]
1)以往动物群模拟关注点多以二维平面上质点的运动规则(c.muro,r.escobedo,wolf-pack(canis lupus)hunting strategies emerge from simple rules in computational simulations,behavioural processes,2011 88(3):192-197),缺少对复杂三维世界和周遭环境的模拟以及对于动物个体运动以及群体影响的考量;
[0006]
2)对捕食者和被捕食者的较高级的群体智能和个体智能无法充分体现,这些智能个体可以感知环境,发现威胁,并根据周围环境决定其运动;
[0007]
3)以往的以狼群为代表的捕猎场景模拟中,只注重狼群的行为智能,对被捕食者个体的运动行为描述往往采用简单的规则,如(j.d.madden,multi-robot system based on model of wolf hunting behavior to emulate wolf and elk interactions,ieee international conference on robotics and biomimetics,2011)中规定被捕食者的运动保持匀速直线,缺乏对于两个智能群体的具有对抗属性(adversarial)的真实感模拟。
[0008]
相关研究包括:
[0009]
1.被捕食者集群运动算法
[0010]
被捕食者集群运动部分,经典的boid模型(reynolds,craig.(1987).flocks,herds,and schools:a distributed behavioral model.acm siggraph computer graphics.21.25-34.10.1145/280811.281008.)是一种发源于计算鸟类等动物群体运动的
计算机模型,现今被广泛运用在游戏领域的动物行为ai中。boid模型视集群中个体为同质化的质点,每个个体可以感知到周围其他个体的位置和速度信息,并根据三个简单、清晰的规则(碰撞避免原则(collision avoidance),速度对齐原则(velocity matching),集群聚集原则(flock centering))计算出自身的运动方向和速度。
[0011]
boid模型被广泛地运用于计算机图形学的真实动物集群模拟中。delgado在基本的boid模型中加入了恐惧因素的影响,并且得出高度互动性动物集群的存在可以提高用户在虚拟世界中的沉浸感(delgado-mata,c.,martinez,j.i.,bee,s.et al.on the use of virtual animals with artificial fear in virtual environments.new gener.comput.25,145
–
169(2007))。hartman和benes在boid模型的对齐规则上添加了额外的转向驱动力,这决定了个体成为集群领导并试图逃脱的几率(hartman.autonomous boids[j].computer animation&virtual worlds,2010,17(3-4):199-206.)。
[0012]
2.捕食者集群运动算法
[0013]
关于群体捕猎的智能行为,机器人领域曾经做了大量的工作,但是这些工作主要关注与机器人智能体以及智能体之间协作的围捕策略、智能决策与控制等方面,往往忽视对动态行为的真实感模拟。
[0014]
在捕食者集群运动模拟方面,c.muro等人提出仅通过2个简单的规则模拟狼群集体狩猎时的围捕和埋伏行为(参考c.muro,r.escobedo,wolf-pack(canis lupus)hunting strategies emerge from simple rules in computational simulations,behavioural processes,2011 88(3):192-197),其算法机械地等待狼群均匀分布在以猎物为中心的圆周上,这与实际的狼群捕猎行为十分不符。同时,该算法中只能模拟多个狼个体追逐一个被捕食者的场景,无法模拟狼群对于被捕食者群体的追逐和捕猎的整个过程。
[0015]
j.d.madden等人提出将狼围猎的过程用有限状态机的方式呈现,捕猎过程分成搜索、接近、追逐群体、追逐个体等多个步骤(参考j.d.madden,multi-robot system based on model of wolf hunting behavior to emulate wolf and elk interactions,ieee international conference on robotics and biomimetics,2011),该算法的重心在于狼个体的智能模拟,对于被捕食者的行为用简单的匀速直线运动简化,这显然与真实的捕猎运动过程不符。
技术实现要素:
[0016]
针对现有技术中存在的技术问题,本发明的目的在于提供一种基于三维环境态势感知的群体围猎-逃跑智能行为模拟方法。
[0017]
本发明分析了具有一定智能的群体运动的机理,进而建立数学模型刻画群体的趋同运动、集体围猎的智能和躲避威胁的智能行为,设计一种新的带有环境感知的三维高级动物群体具有智能(捕食者和被捕食者的捕猎-逃离)的行为模拟方法。本发明对虚拟现实、计算机游戏和动画、动物仿生学、机器人智能等领域具有重要的意义和作用。本发明的主要贡献为:
[0018]
1)设计了基于三维环境感知的较高级动物群体行为的模拟方法框架,能够真实地模拟捕食者集群对被捕食者集群的兼具群体智能和个体智能的捕食-逃跑行为;
[0019]
2)设计了围猎-逃跑问题中被捕食者/捕食者在动态模拟过程中根据环境的即时
感知进行运动的调整方法,环境感知包含了个体对三维地形环境的感知、对周围同类个体和同类群体的感知、对非同类个体和群体的感知(威胁等)。
[0020]
本发明的技术方案为:
[0021]
一种基于环境态势感知的群体围猎-逃跑智能行为模拟方法,其步骤包括:
[0022]
1)初始化配置场景:在三维场景中生成多个被捕食者并初始化其位置,在该三维场景中生成设定数目的捕食者,捕食者个体的初始位置随机分配在被捕食者群的外围;每个捕食者和被捕食者分别以一个智能体的形式存在;
[0023]
2)捕食者依据同类的位置信息及该捕食者当前感知范围内的猎物,改变自身当前状态;
[0024]
3)捕食者根据被捕食者群体的分布信息接近猎物组的中心;
[0025]
4)各被捕食者处于空闲状态并时刻获取威胁信息;当被捕食者感知到威胁时,根据捕食者的行为计算出各被捕食者的逃离行为;
[0026]
5)捕食者经过聚类分析,选择其中一目标个体作为捕猎对象;如果选择捕猎对象成功,则进行步骤6);否则返回步骤2),继续寻找新的捕猎对象;
[0027]
6)捕食者执行捕猎行为进行一对一追逐;在捕食者执行捕猎行为和被捕食者执行逃离行为期间,根据各智能体周边的三维环境的态势计算和调整对应智能体的运动;
[0028]
7)如果捕食者成功抓住被捕食者,即捕食者和被捕食者的几何体在该三维空间中有碰撞,则被判定为捕猎成功;否则捕猎失败,返回步骤2)捕食者继续寻找新的捕猎对象。
[0029]
进一步的,采用boid运动模型生成所述被捕食者对应的智能体;在计算被捕食者个体mi下一帧的运动速度时引入一个方向随机量,即大小固定为sn的噪音向量ni(t);当被捕食者个体mi成为捕猎对象时,噪音向量ni(t)的方向改为与当前运动方向夹角小于90
°
的随机方向。
[0030]
进一步的,各被捕食者获取t时刻威胁信息dwi(t)的方法为:对任一被捕食者个体mi,其当前位置为pi,其可感知捕食者的范围为以自身为圆心、半径为rw的圆,同时设被捕食者个体的有效视角范围为δ;在任意时刻t,设wi(t)为mi能够感知到的捕食者个体集合,该集合wi(t)内的捕食者个体对mi施加一个dwi(t)的向量形式的威胁感知因子;设捕食者个体wk时刻t的位置为p
wk
和速度为则其中,α为用来调节向量大小的辅助参数。
[0031]
进一步的,根据θi(t 1)=θi(t) dsi(t) dai(t) dci(t) ni(t) dwi(t)更新被捕食者个体mi在t 1时刻的速度矢量θi(t 1);其中,θi(t)被捕食者个体mi在t时刻的速度矢量,dsi(t)为碰撞避免量,dai(t)为集群聚集量,dci(t)为速度对齐量。
[0032]
进一步的,步骤6)中,根据各智能体周边的三维环境的态势计算和调整对应智能体的运动的方法为:根据智能体当前t时刻的视线方向估算正前方地形坡度ηm,同时分别计算左偏的坡度η
l
和右偏的坡度ηr,然后根据坡度信息计算得到的向量dti(t)调整对应智能
体的运动;其中其中,若η
l
《ηr,则否则η
min
为三维环境中的地形向智能体给予反作用力的最低坡度,η
max
为智能体能通过的最大坡度,β为转向灵敏度因子;为智能体当前运动方向的正左方的方向向量,为智能体当前运动方向的正右方的方向向量,为智能体的速度向量;在t 1时刻被捕食者调整后的运动速度为θi(t 1)=θi(t) dsi(t) dai(t) dci(t) ni(t) dwi(t) dti(t)。
[0033]
进一步的,步骤6)中,被捕食者执行逃离行为的策略为:未成为捕猎对象的被捕食者运动速度为θi(t 1)=θi(t) dsi(t) dai(t) dci(t) ni(t) dwi(t) dti(t);成为捕猎对象的被捕食者运动速度为θi(t 1)=ni(t) dwi(t) dti(t)。
[0034]
进一步的,步骤3)中,捕食者根据被捕食者群体的分布信息接近猎物组的中心的方法为:设在时刻t捕食者wk以速度v
trot
接近被捕食者mi,则捕食者w
t
在t 1时刻的运动速度其中,wk(t)为t时刻wk感知到的捕食者集合,repk(t)为捕食者wk周围其他捕食者个体对捕食者wk的排斥项,v
run
为追击速度,是捕食者wk到mi的方向向量,为wj的速度向量,为捕食者wk到wj的方向向量。
[0035]
进一步的,在时刻t捕食者wk感知范围内的其他捕食者集合为wk(t),捕食者wk选取所述捕猎对象的方法为:
[0036]
a)若存在wj∈wk(t)且wj已选定捕猎对象m
t
,则将m
t
作为wk的捕猎对象,否则进行下一步的判断和选择;
[0037]
b)若感知范围内有被捕食者目标m
t
距wk距离小于d
t
,则将m
t
作为wk的捕猎对象,否则进行下一步的判断和选择;
[0038]
c)若感知范围内有目标m
t
在聚类算法下单独成一聚类,则将m
t
作为wk的捕猎对象,否则进行下一步的判断和选择;
[0039]
d)若感知范围内有目标mi在聚类算法下为聚类边缘个体,则将m
t
作为wk的捕猎对象,否则进行下一步的判断和选择;
[0040]
e)选择感知范围内所在聚类大小最小的被捕食者个体m
t
作为wk的捕猎对象。
[0041]
进一步的,步骤6)中,捕食者执行捕猎行为的方法为:设捕食者在t时刻确定的捕猎对象为m
t
,则该捕食者在t 1时刻的速度为σk(t 1)=attrk(t) repk(t) dti(t);其中,γ为调整向量大小的参数,v
sprint
为捕杀速度;当该捕食者与m
t
的距离小于da,则该捕食者进入捕猎攻击状态,在捕猎攻击状态下捕食者的运动速度为动速度为为捕食者wk到捕猎对象m
t
的方向向量。
[0042]
进一步的,步骤2)中,捕食者基于voronoi图的邻域判断改变自身当前状态。
[0043]
与现有技术相比,本发明的积极效果为:
[0044]
本发明的智能行为模拟方法可以实现三维空间内逼真的、完整的捕猎行为模拟。相较于以往的方法,本发明方法模拟的结果具有更高的逼真度和可信度。同时,本发明为用户提供了各种丰富的可调参数,用户可以通过对初始的参数设置的调整,模拟多种复杂的群体围捕和逃跑行为,以及在多种地形地貌的场景下的围捕和逃跑行为的模拟。
附图说明
[0045]
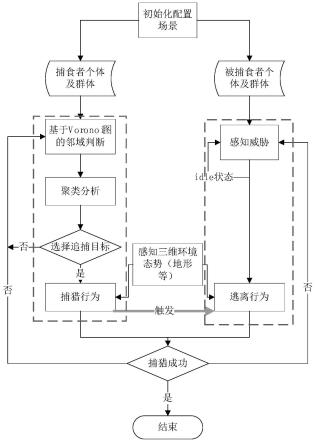
图1是为捕食者和被捕食者群体的基于态势感知的围猎-逃跑模拟方法框架;
[0046]
图2为捕食者和被捕食者的捕猎-逃离模拟方法的流程图。
具体实施方式
[0047]
下面通过具体实施例和附图,对本发明做进一步详细说明。
[0048]
本发明即时的态势感知模型包含了个体对三维地形环境的感知、对周围同类个体和同类群体的感知、对非同类个体和群体的感知。具体而言,无论捕食者还是被捕食者个体根据周遭同类的运动情况的感知、视野范围内当前所处的环境地形的感知决定运动行为;同时捕食者个体依据感知范围内被捕食者集群的分布状况以及周遭捕食者个体的追捕状态选择目标猎物;而被捕食者感知来自捕食者的威胁并采取逃离的行为。
[0049]
由于捕食行为是由捕食者发动的,捕食者个体的运动由猎物的位置驱动,因此本发明为捕食者个体设计了一个有限状态机模型。捕食者个体的初始位置随机分配在远离被捕食者的外围,依据当前感知范围内的猎物及同类的位置信息改变自身当前状态;本发明对被捕食者设计基于环境态势感知的增强boid模型框架,并利用聚类算法选择追逐的目标。整个围猎-逃跑模拟系统的基本原理如图1所示,捕食者/被捕食者都依据每时刻的感知信息动态调整个体的运动。上述框架可以模拟相对真实和完整的捕猎场景。
[0050]
整个行为模拟方法和系统的流程如图2所示,其步骤如下:
[0051]
1)初始化配置场景:根据被捕食者的指定数目,在三维场景中生成指定数目的被捕食者,被捕食者群体的初始位置随机生成;根据捕食者的指定的数目,捕食者个体的初始位置随机分配在远离被捕食者群的外围。每个捕食者和被捕食者都以一个智能体(agent)的形式存在。
[0052]
2)捕食者的个体及群体执行基于voronoi图的邻域判断(2.1部分)。这些捕食者将依据当前感知范围内的猎物及同类的位置信息改变自身当前状态。
[0053]
3)捕食者个体即群体执行聚类分析(2.2部分)。捕食者会根据被捕食者群体的分布信息接近猎物组的中心。
[0054]
4)被捕食者的个体和群体则时刻在感知威胁并处于idle状态(1.3部分内容),即空闲的状态。感知到捕食者的捕猎行为的威胁,并根据捕食者的行为计算出被捕食者个体的逃离行为。
[0055]
5)捕食者个体经过聚类分析,会选择其中最脆弱的个体作为捕猎对象(2.3部分)。如果选择捕猎对象成功,则执行捕猎行为进行一对一追逐;否则返回基于voronoi图的邻域判断模块继续寻找新的捕猎目标。
[0056]
6)在捕食者执行捕猎行为(2.4部分内容)和被捕食者执行逃离行为期间(1.5部分内容),它们时刻感知周边的三维环境的态势(后文所述通过计算动物智能体当前时刻的运动的视线方向和视线方向前方的三维地形环境粗略估算正前方的坡度ηm,同时分别计算左偏和右偏的坡度η
l
和ηr),也就是根据周边的三维环境的态势计算和调整自身的运动(1.4部分内容)。
[0057]
7)如果捕食者成功抓住被捕食者个体,即捕食者和被捕食者个体的几何体在空间中有碰撞,则被判定为捕猎成功,系统终止;否则捕猎失败,被捕食者成功逃脱,则捕食者重新返回基于voronoi图的邻域判断模块继续寻找新的捕猎目标,而被捕食者重新返回威胁感知模块。
[0058]
1.基于态势感知的被捕食者智能行为模型
[0059]
boid模型在动物集群模拟的过程中做出了两点假设:(1)集群中个体的运动速率是恒定的,只改变运动方向;(2)个体不受到视野角度的限制,可360
°
感知到三块区域中的其他个体。而这两点假设显然是不符合现实。
[0060]
首先,集群运动中个体的运动速度应当受到多方面因素的影响,如邻居个体的运动速率和方向、前方的地形特点、随机因素以及是否有威胁存在等。其次,自然界中大部分动物的视野是有限而非360
°
的,如人的最大视野角度为180
°
。在模拟集群运动时,个体的可感知视角应随着模拟物种的不同进行适当调整。
[0061]
本发明设计基于态势感知的被捕食者增强boid行为模型,同时针消除了传统boid方法与现实不符的假设条件的限制。为了更真实地模拟,本文方法中被捕食者设定了以下条件:
[0062]
(1)所有个体均为同质个体,除算法内置的随机变量外无个体差异,不存在集群内部的阶级关系。
[0063]
(2)个体间不存在显式的一对一信息交流,个体所有运动方向和速率的判断均基于对邻居、地形和外部威胁的感知。
[0064]
(3)个体间不存在显式的合作关系,个体仅通过分布位置和运动状态对其余个体产生影响。
[0065]
(4)个体对环境的感知仅限于视觉范围,听觉、嗅觉等其他感官未被纳入本次模拟的考虑范畴内。
[0066]
1.1boid运动模型
[0067]
以m表示群体中所有被捕食者个体的集合,集合中的每个个体由mi表示,它在t时刻的速度矢量用θi(t)表示。
[0068]
根据boid模型的理论,在任意t时刻,mi可感知到其他个体的范围分为三部分:排斥区域、一致区域和吸引区域,由以mi为圆心,rs、ra、rc为半径的三个圆分割而成,rs《ra《rc。在排斥区域内的个体会给当前个体的运动以反作用力,个体的运动方向会趋于一致区域内所有个体的平均运动速度,而吸引区域内所有个体的平均位置会给当前个体一个前进的速度驱动。个体mi在t 1时刻的运动速度矢量θi(t 1)可由θi(t)与碰撞避免量(seperation)dsi(t),速度对齐量(alignment)dci(t),以及集群聚集量(cohesion)dai(t)三个分量相加得到。
[0069]
boid模型中个体t 1时刻的速度矢量:
[0070]
θi(t 1)=θi(t) dsi(t) dai(t) dci(t)
[0071]
1.2随机噪声
[0072]
为了模拟自然界中动物个体在运动中出现的随机因素,本发明使用了随机噪音。在计算集群个体mi下一帧的运动速度时引入了一个方向随机量,即大小固定为sn的噪音向量ni(t)。当个体被捕食者锁定追逐时,噪音向量的方向改为与当前运动方向夹角小于90
°
的随机方向。
[0073]
随机噪声的引入有效避免了此前boid模型中出现的集群朝向某一方向持续移动的不真实情况,并且使得无危胁时被捕食者群的自由游荡状态下的模拟变得更加真实。同时,被锁定后噪音向量方向的改变确保了个体不会因噪音的存在而减小存活的几率。于是速度方向的更新规则更新为:
[0074]
θi(t 1)=θi(t) dsi(t) dai(t) dci(t) ni(t)
[0075]
1.3被捕食者感知威胁模型
[0076]
被捕食者需要对附近出现捕食者所带来的威胁进行态势感知,并做出逃避策略的选择。通过对大量捕食者群捕猎录像的观察,我们发现捕食者的速度方向有时比与猎物间的距离更能影响猎物的逃避行为。如捕食者a正在全力追逐被捕食者b,而此时虽然被捕食者c距离a并不远,却没有显著地对a的存在产生反应,其原因是a当前的运动速度方向并非朝向c或与c背道而驰。因此在设计算法时,本发明将捕食者在于猎物方向上的速度分量占比作为重要的考量因素。
[0077]
基于此,本发明设计了如下的威胁感知因子dwi(t)。对任一被捕食者个体mi,其当前位置为pi,其可感知捕食者的范围为以自身为圆心,半径为rw的圆,同时设被捕食者个体的有效视角范围为δ,则boid模型中处于个体盲区范围内的其他个体将不再对当前个体的运动判断产生影响,把δ取为有蹄类食草动物的平均视角范围300
°
。则被捕食者的真正的感知范围为δ角度的扇形范围内。在任意时刻t,设wi(t)为被捕食者个体mi感知到的捕食者个体集合,该集合内的捕食者个体对mi施加一个dwi(t)的向量形式的威胁感知因子。捕食者个体wk同样有两个参数,分别是当前时刻的位置矢量p
wk
和速度矢量
[0078]
于是有
[0079][0080]
其中,α为用来调节向量大小的辅助参数,α是为了让威胁感知这一分量的大小和其他分量保持同一数量级,不会过大或过小。
[0081]
在算法中,我们让每一个被捕食者感知范围内的捕食者个体对该被捕食者施加一个远离捕食者的驱动力,这个驱动力向量由两者连线方向向量乘以影响因子得到。影响因子的计算方式为捕食者个体t时刻的运动速度在被捕食者捕食者连线方向上的分量占总速度大小的比值,再用sigmoid函数将其映射到[0,1]的范围上。
[0082]
于是,被捕食者个体的运动的计算方式更新如下:
[0083]
θi(t 1)=θi(t) dsi(t) dai(t) dci(t) ni(t) dwi(t)。
[0084]
1.4被捕食者感知三维环境态势
[0085]
我们设计了群体模拟中的三维地形感知算法。地形态势的感知对群模拟的具有重要意义。例如,当个体的运动前进方向上一定距离内出现陡坡或岩石等地形阻挡,个体应能提前感知到地形的变化并做出转向调整,在被捕食者被追逐的过程中,合理的避开陡峭的地形并选择相对平坦的逃生路线有利于躲避捕食者的追逐。
[0086]
通过动物当前时刻的运动的视线方向粗略估算正前方地形的坡度ηm,同时分别计算左偏和右偏的坡度η
l
和ηr并根据坡度信息计算向量dti(t)向个体给予速度建议反馈。
[0087][0088]
其中
[0089]
其中,为当前智能体的速度向量,η
min
为地形向个体给予反作用力的最低坡度,η
max
为个体可通过的最大坡度,前者决定了个体对陡峭地形的敏感程度,后者则决定了个体对于地形的适应能力;为当前个体运动方向的正左方的方向向量,为当前个体运动方向的正右方的方向向量。当个体检测当前坡度大于η
min
时,dti(t)的计算中会增加一个转向建议向量dlri(t),它根据左右两侧坡度选择坡度较小的一侧给予个体一个转向的建议,从而绕过较为陡峭的地形。β为转向灵敏度因子,其大小决定个体在面对较陡地形时转向的速度,较大的数值可以让个体更快地绕过当前地形,即对陡峭地形做出更剧烈的反应。
[0090]
最终,被捕食者个体的行为的运动速度为:
[0091]
θi(t 1)=θi(t) dsi(t) dai(t) dci(t) ni(t) dwi(t) dti(t)
[0092]
同时,考虑到地形对个体视线的阻碍作用,我们会对每个个体感知范围内的邻居的集合重新检查,若某个体与当前个体之间确实存在被地形遮挡的情况,其运动对当前个体造成的影响应当被忽略,于是从相应集合中剔除被遮挡的个体。
[0093]
将动物个体置入三维环境后,带有环境感知的boid算法使得被捕食者个体在起伏较大的地形前显著减速,并在减速的过程中开始向一侧转向,避免了此前算法中个体会径直冲向陡崖的不真实现象。同时,个体有时会选择“之”字形的路线爬上山坡,这也十分符合我们对于客观事实的观察。
[0094]
1.5被捕食者的逃离行为策略
[0095]
在捕食行为中,当距离猎物足够近时捕食者会锁定猎物,也就是进行捕猎最后的一对一追逐状态。在进入追逐状态这种极端条件后,被捕食者在进行速度选择时所考虑的唯一因素应调整为仅剩地形和捕食者带来的威胁,也就是仅凭借其本能做出求生反应。因此在本发明算法中,被锁定后的被捕食者个体将不再遵守boid模型中的三个规则,即不再考虑临近被捕食者个体对其的影响。同样的,其他被捕食者个体也将不受到被锁定个体的运动对其带来的影响。于是有
[0096]
[0097]
此外,在碰撞检测和障碍躲避环节,本发明使用了以reciprocal velocity obstacle算法为基础的rvo2库(jur van den berg,reciprocal velocity obstacles for real-time multi-agent navigation,robotics research,2009(pp.3-19))。
[0098]
2.捕食者的捕猎行为智能算法
[0099]
对捕食者个体,除此前被捕食者部分做出的假设条件外,捕食者个体算法还基于以下假设:
[0100]
1.在捕猎过程中捕食者个体间会有少量的信息交流,但不存在显式的合作或指挥关系。
[0101]
2.捕食者个体在不同状态下共有三种等级的速度:闲逛速度v
trot
、追击速度v
run
以及捕杀速度v
sprint
,其中v
trot
《v
run
《v
sprint
。根据捕食者的特性(不同的物种如猎豹、狼、狮子等),可以设置不同的速度值。
[0102]
3.捕食者对地形态势的感知方式以及对地形的敏感程度与被捕食者个体没有差别,即1.4的环境感知方法同样适用于捕食者。
[0103]
捕食者的算法采用一个有限状态机模型,驱动整个模拟方法运行。
[0104]
2.1基于voronoi图的邻域关系判断
[0105]
voronoi图在群体行为模拟中被广泛运用于智能个体的路径规划、碰撞避免等任务中(参考champagne j,tang w.real-time simulation of crowds using voronoi diagrams,eg uk theory and practice of computer graphics,2005:195-201.)。本算法利用个体在voronoi图中邻居的深度(order)确定感知范围。与被捕食者部分算法不同,感知范围并非由以当前个体为中心的圆确定,而是选择个体在voronoi图中深度小于等于2的邻居加入到可感知集合中。voronoi构建是基于将场景内所有个体的位置向水平平面做投影,把投影点作为所有的控制点得到。在真实世界中,动物个体的运动往往只受到其在各个方向上最近个体运动状态的影响,而与个体间的绝对距离远近关系较小。因此本发明以voronoi图中距离当前个体深度小于等于2为标准,取代了在其他工作中更为常见的的圆形范围。
[0106]
2.2聚类分析
[0107]
除了感知周围个体,捕食者还会对感知到的被捕食者群体进行初步分析,选择更为“脆弱”的个体,也就是最佳的捕猎目标个体所在方向作为接近被捕食者群的方向。为此,本发明对被捕食者群中个体位置在应用聚类算法,并将每个个体的聚类信息记录。
[0108]
在时刻t,捕食者个体会将可感知范围内被捕食者个体里所处聚类大小最小的被捕食者mi视为“脆弱”个体,并以v
trot
的速度接近这个方向。同时,考虑到捕食者个体捕猎时的相对独立性,个体还会受到感知范围内其他捕食者个体带来的排斥力。于是得到捕食者wk在t 1时刻的运动速度σk(t 1):
[0109][0110]
[0111]
其中,是捕食者wk到“脆弱”个体mi的方向向量;wk(t)为t时刻wk感知到的捕食者同类集合,对其中的任一捕食者个体wj,为捕食者wk到wj的方向向量,为wj的速度向量;dtk(t)代表捕食者个体对于地形的感知,算法在前文已有介绍。repk(t)项反映了周遭捕食者同类个体对当前个体的排斥作用,它的存在可以避免捕食者群在追捕的过程中过于密集。
[0112]
2.3选择追捕目标
[0113]
若捕食者个体距当前“脆弱”个体的距离小于安全距离dg,捕食者的状态会转换为选择追捕目标并跟踪的状态,此过程为追逐一个包含若干个被捕食者个体所组成的小群体的过程。一旦成功选定目标,个体便进入捕猎状态,否则重新回到对周边的局势进行观察和判断的状态。
[0114]
选择目标模块为在当前被捕食者群中选择最“脆弱”的个体作为最佳的追逐对象,具体实现步骤如下:
[0115]
在时刻t,对于捕食者wk,以及其感知范围内的其他捕食者集合wk(t):
[0116]
1)若存在wj∈wk(t)且wj已选定追逐目标m
t
,则将m
t
作为wk的追逐目标(即捕猎对象),选择过程结束,否则进行下一步的判断和选择;
[0117]
2)若感知范围内有被捕食者目标m
t
距wk距离小于d
t
,则将m
t
作为wk的追逐目标,选择过程结束,否则进行下一步的判断和选择;
[0118]
3)若感知范围内有目标m
t
在聚类算法下单独成一聚类(被算法标记为outliers),则将m
t
作为wk的追逐目标,选择过程结束,否则进行下一步的判断和选择;
[0119]
4)若感知范围内有目标mi在聚类算法下为聚类边缘个体(被算法标记为borders),则将m
t
作为wk的追逐目标,选择过程结束,否则进行下一步的判断和选择;
[0120]
5)选择感知范围内所在聚类大小最小的被捕食者个体m
t
作为wk的追逐目标。
[0121]
2.4捕猎行为
[0122]
进入捕猎行为的状态后,捕食者会锁定被追捕的唯一目标并开始一对一的竞逐,算法会首先记录下当前的时间,并将目标设置为锁定状态。设当前确定的追逐目标为m
t
并且以邻居的排斥作用和猎物的吸引作用两部分计算出捕食者个体下一时刻的速度:
[0123]
σk(t 1)=attrk(t) repk(t) dti(t)
[0124][0125]
其中,为捕食者wk到追逐目标m
t
的方向向量;γ为调整向量大小的参数。最后,算法计算捕食者个体与目标的距离,若距离小于da,则进入捕猎攻击状态。
[0126]
本发明为每个被捕食者个体设置了一个健康值hp,象征其在被捕食者攻击时的机体状况(初始值为100)。捕猎攻击状态下,目标个体的hp会逐步减少,当目标hp下降至0代表猎物已经失去逃跑能力并保持静止,则表明猎物已无法逃离,捕猎成功,并最终结束。每个捕食者个体在创建时会随机生成一个最大追逐时间th∈[t
min
,t
max
],若追逐时间超过th,则视为捕食者体力不支,放弃追逐进入放弃状态,停止追逐。在捕猎攻击状态下捕食者的运动速度计算:
[0127][0128]
3.实验结果和分析
[0129]
3.1算法效果展示
[0130]
以狼作为捕食者、麋鹿作为被捕食者为例,我们测试和验证。鹿群游荡状态下的运动较为自然,不会有朝某一方向持续运动的不真实现象。狼群靠近时,麋鹿小集群内部展现出一致的逃逸反应,相对远离威胁的个体也会因邻居的逃逸行为而开始向远离威胁的方向运动。
[0131]
在进入被追逐状态后,被锁定的麋鹿个体不再与周围邻居运动保持一致,体现出本能的求生反应;邻近个体也不再考虑被锁定个体的运动,避免了狼追逐一群麋鹿的不真实情况。地形感知算法保证个体尽量选择平坦或者地形沟槽处作为前进方向。狼群算法的有限状态机模型较好地模拟了狼捕猎时由潜伏接近到最终追逐猎物的完整过程。
[0132]
3.2参数调整
[0133]
本发明提供了大量的可以交互调整的参数,以便模拟各种复杂的追捕-逃离行为。
[0134]
噪音向量的大小sn设定为2.0,适当地增大这个数值会让个体的运动展现出更多的不可预测性;由于捕食者速度在捕食者与被捕食者连线上分量占速度的比取值范围为[-1,1],α设置为5可以有效地将比值映射到[0,1]区间上;η
min
表示物体感受到地形反作用力的最小坡度,增加η
min
的大小可以降低个体对于轻度颠簸地形的敏感程度;η
max
则是个体所能跨越的最大坡度,过高的数值会使得个体可以翻越陡峭的地形,造成不真实性。η
min
和η
max
分别被设置为30和60;β的大小决定个体在面对较陡地形时转向的速度,较大的数值可以让个体更快地绕过当前地形,我们将其设置为2.0;dg和da则分别被设置为40.0和10.0,γ的大小为5.0。此外,我们可以调整被捕食者集群大小m、捕食者集群大小n、捕食者群分布角度范围θ以及最大追逐时间th,并记录了在不同情况下的捕猎成功率ω及平均成功捕猎用时ta。
[0135]
在相同实验条件下,狼群的数量的增、狼群分布角度和最大追逐时间的增加可以显著提高捕猎的成功率,这种成功率的增加符合了直观上我们对于实验参数的理解:狼群数量以及分布角度的加大可以理解为狼群可以更好地包围鹿群并且更多出现多只狼围攻同一头鹿的情况,而最大追逐时间的增大可以解释为狼个体耐力的提升,从而提高了布列的成功率。
[0136]
同时可以看到,在相同实验条件下鹿群数量的增多,捕猎的成功率大体呈下降趋势。这说明在群体数量较大的情况下,通过感知周围个体的运动情况,鹿群可以对更大范围内出现的危险做到感知,从而更好地对威胁的到来做出预判并提高自身的生存几率。
[0137]
本发明方法还可以适用于如雪地、沙漠等多元的地形场景,捕食者与被捕食者的模型也可自由更换,从而模拟出丰富的捕猎情景,具有很高的可移植性和拓展性。
[0138]
以上实施例仅用以说明本发明的技术方案而非对其进行限制,本领域的普通技术人员可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明的精神和范围,本发明的保护范围应以权利要求所述为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。