技术特征:
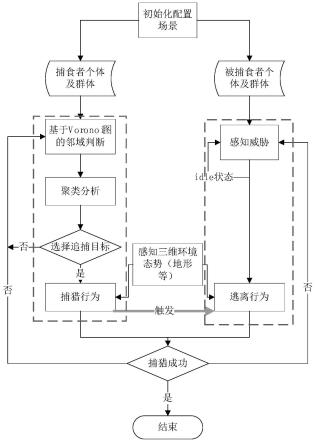
1.一种基于环境态势感知的群体围猎-逃跑智能行为模拟方法,其步骤包括:1)初始化配置场景:在三维场景中生成多个被捕食者并初始化其位置,在该三维场景中生成设定数目的捕食者,捕食者个体的初始位置随机分配在被捕食者群的外围;每个捕食者和被捕食者分别以一个智能体的形式存在;2)捕食者依据同类的位置信息及该捕食者当前感知范围内的猎物,改变自身当前状态;3)捕食者根据被捕食者群体的分布信息接近猎物组的中心;4)各被捕食者处于空闲状态并时刻获取威胁信息;当被捕食者感知到威胁时,根据捕食者的行为计算出各被捕食者的逃离行为;5)捕食者经过聚类分析,选择其中一目标个体作为捕猎对象;如果选择捕猎对象成功,则进行步骤6);否则返回步骤2),继续寻找新的捕猎对象;6)捕食者执行捕猎行为进行一对一追逐;在捕食者执行捕猎行为和被捕食者执行逃离行为期间,根据各智能体周边的三维环境的态势计算和调整对应智能体的运动;7)如果捕食者成功抓住被捕食者,即捕食者和被捕食者的几何体在该三维空间中有碰撞,则被判定为捕猎成功;否则捕猎失败,返回步骤2)捕食者继续寻找新的捕猎对象。2.如权利要求1所述的方法,其特征在于,采用boid运动模型生成所述被捕食者对应的智能体;在计算被捕食者个体m
i
下一帧的运动速度时引入一个方向随机量,即大小固定为s
n
的噪音向量n
i
(t);当被捕食者个体m
i
成为捕猎对象时,噪音向量n
i
(t)的方向改为与当前运动方向夹角小于90
°
的随机方向。3.如权利要求1或2所述的方法,其特征在于,各被捕食者获取t时刻威胁信息dw
i
(t)的方法为:对任一被捕食者个体m
i
,其当前位置为p
i
,其可感知捕食者的范围为以自身为圆心、半径为r
w
的圆,同时设被捕食者个体的有效视角范围为δ;在任意时刻t,设w
i
(t)为m
i
能够感知到的捕食者个体集合,该集合w
i
(t)内的捕食者个体对m
i
施加一个dw
i
(t)的向量形式的威胁感知因子;设捕食者个体w
k
时刻t的位置为p
wk
和速度为则则其中,α为用来调节向量大小的辅助参数。4.如权利要求3所述的方法,其特征在于,根据θ
i
(t 1)=θ
i
(t) ds
i
(t) da
i
(t) dc
i
(t) n
i
(t) dw
i
(t)更新被捕食者个体m
i
在t 1时刻的速度矢量θ
i
(t 1);其中,θ
i
(t)被捕食者个体m
i
在t时刻的速度矢量,ds
i
(t)为碰撞避免量,da
i
(t)为集群聚集量,dc
i
(t)为速度对齐量。5.如权利要求4所述的方法,其特征在于,步骤6)中,根据各智能体周边的三维环境的态势计算和调整对应智能体的运动的方法为:根据智能体当前t时刻的视线方向估算正前方地形坡度η
m
,同时分别计算左偏的坡度η
l
和右偏的坡度η
r
,然后根据坡度信息计算得到的向量dt
i
(t)调整对应智能体的运动;其中其中,若η
l
<η
r
,则
否则η
min
为三维环境中的地形向智能体给予反作用力的最低坡度,η
max
为智能体能通过的最大坡度,β为转向灵敏度因子;为智能体当前运动方向的正左方的方向向量,为智能体当前运动方向的正右方的方向向量,为智能体的速度向量;在t 1时刻被捕食者调整后的运动速度为θ
i
(t 1)=θ
i
(t) ds
i
(t) da
i
(t) dc
i
(t) n
i
(t) dw
i
(t) dt
i
(t)。6.如权利要求5所述的方法,其特征在于,步骤6)中,被捕食者执行逃离行为的策略为:未成为捕猎对象的被捕食者运动速度为θ
i
(t 1)=θ
i
(t) ds
i
(t) da
i
(t) dc
i
(t) n
i
(t) dw
i
(t) dt
i
(t);成为捕猎对象的被捕食者运动速度为θ
i
(t 1)=n
i
(t) dw
i
(t) dt
i
(t)。7.如权利要求4所述的方法,其特征在于,步骤3)中,捕食者根据被捕食者群体的分布信息接近猎物组的中心的方法为:设在时刻t捕食者w
k
以速度v
trot
接近被捕食者m
i
,则捕食者w
k
在t 1时刻的运动速度其中,w
k
(t)为t时刻w
k
感知到的捕食者集合,rep
k
(t)为捕食者w
k
周围其他捕食者个体对捕食者w
k
的排斥项,v
run
为追击速度,是捕食者w
k
到m
i
的方向向量,为w
j
的速度向量,为捕食者w
k
到w
j
的方向向量。8.如权利要求1所述的方法,其特征在于,在时刻t捕食者w
k
感知范围内的其他捕食者集合为w
k
(t),捕食者w
k
选取所述捕猎对象的方法为:a)若存在w
j
∈w
k
(t)且w
j
已选定捕猎对象m
t
,则将m
t
作为w
t
的捕猎对象,否则进行下一步的判断和选择;b)若感知范围内有被捕食者目标m
t
距w
t
距离小于d
t
,则将m
t
作为w
k
的捕猎对象,否则进行下一步的判断和选择;c)若感知范围内有目标m
t
在聚类算法下单独成一聚类,则将m
t
作为w
k
的捕猎对象,否则进行下一步的判断和选择;d)若感知范围内有目标m
i
在聚类算法下为聚类边缘个体,则将m
t
作为w
k
的捕猎对象,否则进行下一步的判断和选择;e)选择感知范围内所在聚类大小最小的被捕食者个体m
t
作为w
k
的捕猎对象。9.如权利要求1所述的方法,其特征在于,步骤6)中,捕食者执行捕猎行为的方法为:设捕食者在t时刻确定的捕猎对象为m
t
,则该捕食者在t 1时刻的速度为σ
k
(t 1)=attr
k
(t) rep
k
(t) dt
i
(t);其中,γ为调整向量大小的参数,v
sprint
为捕杀速度;当该捕食者与m
t
的距离小于d
a
,则该捕食者进入捕猎攻击状态,在捕猎攻击状态下捕食者的运动速度为猎攻击状态下捕食者的运动速度为为捕食者w
k
到捕猎对象m
t
的方向向量。10.如权利要求1所述的方法,其特征在于,步骤2)中,捕食者基于voronoi图的邻域判断改变自身当前状态。
技术总结
本发明公开了一种基于环境态势感知的群体围猎-逃跑智能行为模拟方法,其步骤包括:1)在三维场景中生成多个捕食者、被捕食者并初始化其位置;2)捕食者依据同类的位置信息及该捕食者当前感知范围内的猎物,改变自身当前状态;3)捕食者根据被捕食者群体的分布信息接近猎物组的中心;4)各被捕食者处于空闲状态并时刻获取威胁信息;当被捕食者感知到威胁时,根据捕食者的行为计算出各被捕食者的逃离行为;5)捕食者选择最脆弱的个体作为捕猎对象;如果选择捕猎对象成功,则进行步骤6);否则返回步骤2);6)根据各智能体周边的三维环境的态势计算和调整对应智能体的运动;7)如果发生碰撞则捕猎成功,否则判定失败并返回步骤2)。否则判定失败并返回步骤2)。否则判定失败并返回步骤2)。
技术研发人员:李胜 于震京 汪国平
受保护的技术使用者:北京大学
技术研发日:2021.04.26
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。