技术特征:
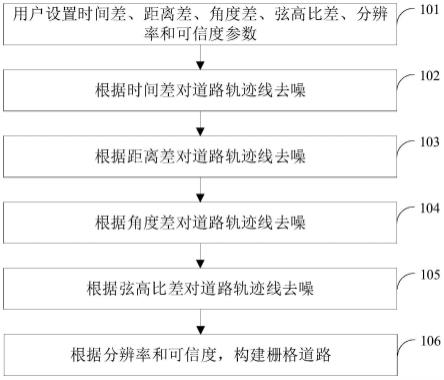
1.一种露天矿山道路轨迹线栅格化方法,其特征在于,包括:获取多条道路轨迹线,其中,所述多条道路轨迹线中的每一条轨迹线均是不同的车辆在一段时间内的基于卫星定位的轨迹点按照采集时间顺序连接而成的线段,每个轨迹点具有空间坐标和采集时间属性;根据轨迹点之间的时间属性和位置属性对每条道路轨迹线进行去噪处理,其中,所述去噪处理为删除不满足预定条件的轨迹点之间的道路;对去噪处理后所述多条道路轨迹线进行中心化处理;根据中心化处理后所述多条道路轨迹线上的所有轨迹点的坐标值计算多条道路轨迹线的非坐标轴平行的最小外包矩形;根据所述非坐标轴平行的最小外包矩形和预先配置的分辨率得到栅格图像上的像素点;从所有像素点中获取预定像素点,其中,判断道路轨迹线所经过的像素点,如果所述多条道路轨迹线中经过某个像素点次数大于可信度,在该像素点为预定像素点;所述可信度用于指示经过像素点的次数的阈值,所述可信度为预先配置的;将所有预定像素点显示为露天矿山道路。2.根据权利要求1所述的方法,其特征在于,根据轨迹点之间的时间属性和位置属性对每条道路轨迹线进行去噪处理包括:对于所述多条道路轨迹线中任意相邻的两个轨迹点,如果采集时间间隔大于时间差t,则删除该相邻两个轨迹点之间的道路;对于所述多条道路轨迹线中任意相邻的两个轨迹点,如果空间坐标距离大于距离差d,则删除该相邻两个轨迹点之间的道路;对于所述多条道路轨迹线上除端点以外的任意中间轨迹点,如果该中间轨迹点与相邻两个轨迹点构建的锐角小于角度差r,则删除该中间轨迹点与相邻两个轨迹点之间的道路;对于所述多条道路轨迹线上除端点以外的任意中间轨迹点,如果该中间轨迹点与相邻两个轨迹点之间的垂直距离与该相邻两个轨迹点之间的距离比值大于弦高比差c,则删除该中间轨迹点与相邻两个轨迹点之间的道路。3.根据权利要求1所述的方法,其特征在于,对去噪处理后所述多条道路轨迹线进行中心化处理包括:设露天矿山道路宽度为w,设偏移方向为v,当矿山道路驾驶规则为靠右行驶时,v取值为1,当矿山道路驾驶规则为靠左行驶时,v取值为-1;设任意道路轨迹线{p1,p2,...,p
n
};对于起点p1,以p1为原点,沿逆时针旋转v
×
90
°
作射线β,计算所述射线与其他所有道路轨迹线的交点,保留交点与原点距离小于w,且交点所在有向线段与的夹角大于90
°
的交点,计算所有保留的交点与原点距离的平均值f,将起点p1沿射线β移动f/2,其中,所述f为所有保留的交点与原点距离的平均值;对于中间点p
i
,以p
i
为原点,沿逆时针旋转作射线β,计算所述射线与其他所有道路轨迹线的交点,保留交点与原点距离小于w,且交点所在有向线段与的夹角大于90
°
的交点,计算所有保留的交点与原点距离的平均值f,将起点p
i
沿
射线β移动f/2;对于末点p
n
,以p
n
为原点,沿顺时针旋转v
×
90
°
作射线β,计算所述射线与其他所有道路轨迹线的交点,保留交点与原点距离小于w,且交点所在有向线段与的夹角大于90
°
的交点,计算所有保留的交点与原点距离的平均值f,将起点p
n
沿射线β移动f/2。4.根据权利要求1所述的方法,其特征在于,根据所述非坐标轴平行的最小外包矩形和预先配置的分辨率得到栅格图像上的像素点包括:获取进行非坐标轴平行的最小外包矩形的四个端点坐标{(x1,y1),(x2,y2),(x3,y3),(x4,y4)},进而栅格图像的宽为高为根据分辨率r,得到栅格图像横向像素点为m=ceil(x/r) 2个,纵向像素点为n=ceil(y/r) 2个,其中,ceil()为向上取整函数。5.根据权利要求3所述的方法,其特征在于,判断道路轨迹线所经过的像素点包括:step1、依次对各条道路轨迹线上相邻轨迹点(x
p
,y
p
)和(x
p 1
,y
p 1
)的连线进行判断经过了哪些像素点;step2、计算轨迹点(x
p
,y
p
)在栅格图像中的位置为其中其中即经过第个像素点,其中,int()为向下取整函数;step3、同理计算轨迹点(x
p 1
,y
p 1
)在栅格图像中的位置(m
p 1
,n
p 1
),及经过的像素点(m
p 1
,n
p 1
);step4、计算轨迹点(x
p
,y
p
)与轨迹点(x
p 1
,y
p 1
)之间的连线经过的像素点为)之间的连线经过的像素点为)之间的连线经过的像素点为其中,k=int(m
p 1
)-int(m
p
)-1。6.一种露天矿山道路轨迹线栅格化装置,其特征在于,包括:第一获取模块,用于获取多条道路轨迹线,其中,所述多条道路轨迹线中的每一条轨迹线均是不同的车辆在一段时间内的基于卫星定位的轨迹点按照采集时间顺序连接而成的线段,每个轨迹点具有空间坐标和采集时间属性;去噪模块,用于根据轨迹点之间的时间属性和位置属性对每条道路轨迹线进行去噪处
理,其中,所述去噪处理为删除不满足预定条件的轨迹点之间的道路;中心化模块,用于对去噪处理后所述多条道路轨迹线进行中心化处理;第二获取模块,用于获取进行中心化处理后所述多条道路轨迹线的非坐标轴平行的最小外包矩形;像素点模块,用于根据所述非坐标轴平行的最小外包矩形和预先配置的分辨率得到栅格图像上的像素点;第三获取模块,用于从所有像素点中获取预定像素点,其中,判断道路轨迹线所经过的像素点,如果所述多条道路轨迹线中经过某个像素点次数大于可信度,在该像素点为预定像素点;所述可信度用于指示经过像素点的次数的阈值,所述可信度为预先配置的;处理模块,用于将所有预定像素点显示为露天矿山道路。7.根据权利要求5所述的装置,其特征在于,所述去噪模块用于:对于所述多条道路轨迹线中任意相邻的两个轨迹点,如果采集时间间隔大于时间差t,则删除该相邻两个轨迹点之间的道路;对于所述多条道路轨迹线中任意相邻的两个轨迹点,如果空间坐标距离大于距离差d,则删除该相邻两个轨迹点之间的道路;对于所述多条道路轨迹线上除端点以外的任意中间轨迹点,如果该中间轨迹点与相邻两个轨迹点构建的锐角小于角度差r,则删除该中间轨迹点与相邻两个轨迹点之间的道路;对于所述多条道路轨迹线上除端点以外的任意中间轨迹点,如果该中间轨迹点与相邻两个轨迹点之间的垂直距离与该相邻两个轨迹点之间的距离比值大于弦高比差c,则删除该中间轨迹点与相邻两个轨迹点之间的道路。8.根据权利要求5所述的装置,其特征在于,所述中心化模块用于:设露天矿山道路宽度为w,设偏移方向为v,当矿山道路驾驶规则为靠右行驶时,v取值为1,当矿山道路驾驶规则为靠左行驶时,v取值为-1;设任意道路轨迹线{p1,p2,...,p
n
};对于起点p1,以p1为原点,沿逆时针旋转v
×
90
°
作射线β,计算所述射线与其他所有道路轨迹线的交点,保留交点与原点距离小于w,且交点所在有向线段与的夹角大于90
°
的交点,计算所有保留的交点与原点距离的平均值f,将起点p1沿射线β移动f/2,其中,所述f为所有保留的交点与原点距离的平均值;对于中间点p
i
,以p
i
为原点,沿逆时针旋转作射线β,计算所述射线与其他所有道路轨迹线的交点,保留交点与原点距离小于w,且交点所在有向线段与的夹角大于90
°
的交点,计算所有保留的交点与原点距离的平均值f,将起点p
i
沿射线β移动f/2;对于末点p
n
,以p
n
为原点,沿顺时针旋转v
×
90
°
作射线β,计算所述射线与其他所有道路轨迹线的交点,保留交点与原点距离小于w,且交点所在有向线段与的夹角大于90
°
的交点,计算所有保留的交点与原点距离的平均值f,将起点p
n
沿射线β移动f/2。9.根据权利要求5所述的装置,其特征在于,所述像素点模块用于:获取进行非坐标轴平行的最小外包矩形的四个端点坐标{(x1,y1),(x2,y2),(x3,y3),
(x4,y4)},进而栅格图像的宽为高为根据分辨率r,得到栅格图像横向像素点为m=ceil(x/r) 2个,纵向像素点为n=ceil(y/r) 2个,其中,ceil()为向上取整函数。10.根据权利要求7所述的装置,其特征在于,所述第三获取模块用于:step1、依次对各条道路轨迹线上相邻轨迹点(x
p
,y
p
)和(x
p 1
,y
p 1
)的连线进行判断经过了哪些像素点;step2、计算轨迹点(x
p
,y
p
)在栅格图像中的位置为其中其中即经过第个像素点,其中,int()为向下取整函数;step3、同理计算轨迹点(x
p 1
,y
p 1
)在栅格图像中的位置(m
p 1
,n
p 1
),及经过的像素点(m
p 1
,n
p 1
);step4、计算轨迹点(x
p
,y
p
)与轨迹点(x
p 1
,y
p 1
)之间的连线经过的像素点为)之间的连线经过的像素点为)之间的连线经过的像素点为其中,k=int(m
p 1
)-int(m
p
)-1。
技术总结
本申请公开了露天矿山道路轨迹线栅格化方法和装置,获取多条道路轨迹线;根据轨迹点之间的时间属性和位置属性对每条道路轨迹线进行去噪处理;对去噪处理后多条道路轨迹线进行中心化处理;根据中心化处理后多条道路轨迹线上的所有轨迹点的坐标值计算多条道路轨迹线的非坐标轴平行的最小外包矩形;根据非坐标轴平行的最小外包矩形和预先配置的分辨率得到栅格图像上的像素点;从所有像素点中获取预定像素点;将所有预定像素点显示为露天矿山道路。本申请自动化程度高实时性高,减少了矿山技术人员的工作量,结合露天矿山道路驾驶规则对轨迹线中心化处理,提高了道路构建的精度,有效地解决了通过GPS轨迹线构建道路存在的GPS轨迹点漂移、丢失问题。丢失问题。丢失问题。
技术研发人员:陈鑫
受保护的技术使用者:长沙迪迈数码科技股份有限公司
技术研发日:2022.08.24
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。