1.本发明属于视觉测量技术领域,具体涉及一种视觉测量模块测量坐标系空间位置关系标定系统及方法。
背景技术:
2.视觉测量技术因其非接触性、高动态性、高精度性等优点,近年来发展迅速。图像传感器作为视觉测量技术产品的关键设备,承担着获取被测部分图像的关键作用,对于利用多图像传感器实现测量的视觉设备,图像坐标系间的位置关系标定是实现整个测量的基础。
3.目前常用的双目视觉相机外参即两测量坐标系关系标定方法有基于张正友棋盘网格法的相机外参标定方法,该方法使用的前提是两相机可以同时获取同一副棋盘网格图像,然而在一些基于激光与机器视觉的空间位置测量装置中,一方面图像传感器的工作坐标系建立在激光成像接收屏上,另一方面由于激光成像接收屏对图像传感器的遮挡,多图像传感器无法同时直接获取标定板图像,因而传统的图像坐标系关系标定方法不再适用。
4.本发明可以有效解决基于激光与机器视觉的空间位置测量装置中建立在两图像接收屏上的图像坐标系间关系的标定问题。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种视觉测量模块测量坐标系空间位置关系标定系统及方法,可以快速实现空间位姿测量装置中两机器视觉测量模块图像测量坐标系空间位置关系的精确标定。
6.本发明解决其技术问题是通过以下技术方案实现的:
7.一种视觉测量模块测量坐标系空间位置关系标定系统,其特征在于:所述标定系统包括空间位姿测量装置、点结构光发生器、v型定位槽及三坐标测量机,
8.所述点结构光发生器,用于产生点结构光,提供标定过程中图像传感器采集的点光斑图像;
9.所述v型定位槽,用于标定过程中安装点结构光发生器;
10.所述三坐标测量机,包括接触式测头、大理石测量平台、测头运动遥控手柄及工控机与测量系统,用以实现标定过程中的空间坐标点的接触式测量;
11.所述空间空间位姿测量装置包括两套图像采集单元、激光分束与折射光路单元、工控机与测量软件,所述图像采集单元包括图像传感模块a、图像传感模块b、激光接收屏a、激光接收屏b、图像传感器a及图像传感器b,所述激光分束与折射光路单元包括激光分束模块及折射光路模块,所述图像传感器a及图像传感器b分别固定连接于所述激光接收屏a、激光接收屏b后侧,用以采集激光接收屏上的激光光斑图像;所述工控机与测量软件通过usb与所述图像传感器a、图像传感器b连接,实现对图像传感器图像信号的采集,通过测量软件实现光斑中心坐标的提取。
12.而且,所述激光接收屏a、激光接收屏b均为透明亚克力板制成,且所述激光接收屏a、激光接收屏b外侧涂镀有纳米漫反射涂层。
13.一种视觉测量模块测量坐标系空间位置关系标定方法,其特征在于:所述标定方法的步骤为:
14.1)在所述空间位姿测量装置的激光接收屏a、激光接收屏b内侧贴放薄板棋盘网格,通过公知的相机畸变校正方法对图像传感器a及图像传感器b的透视畸变和径向畸变分别进行校正,使得校正后的图像传感器a及图像传感器b的光轴垂直于激光接收屏所在平面;
15.2)将所述的激光分束模块取下,将所述激光分束模块的平面反射镜取下;
16.3)将所述的空间位姿测量装置放置于所述的三坐标测量机的大理石测量平台上,启动三坐标测量机,打开工控机与测量系统,建立空间位姿测量装置坐标系o-xyz;
17.4)将点结构光发生器放置于v型定位槽上,打开点结构光发生器,将v型定位槽靠近激光接收屏a,保证点结构光发生器(3-5)在激光接收屏a上的光斑成像位于图像传感器a的视场范围内;
18.5)使v型定位槽轴线垂直激光接收屏a放置,保证点结构光发生器的端面紧密贴合在激光接收屏a上,通过工控机与测量软件读出此时图像传感器采集到的图像光斑中心点坐标值;
19.6)在v型定位槽内转动点结构光发生器,观察工控机与测量软件中图像光斑中心坐标值,不断调整点结构光发生器的镜头端面使其紧密贴合在激光接收屏a上,保证点结构光发生器在转动的过程中,工控机与测量软件中的激光光斑中心坐标值不再发生变化,表明激光光斑中心与点结构光发生器外壳的轴线重合,且点结构光发生器轴线垂直于激光接收屏a,记录下此时的光斑中心坐标值(x1,y1)pixel,并将点结构光发生器与v型定位槽通过压紧装置固定,并且保持与接收屏位置关系不变;
20.7)通过测头运动遥控手柄,移动三坐标测量机接触式测头,在o-xyz坐标系下对点结构光发生器外壳表面进行圆柱测量,至少测量5个点,拟合圆柱面,进而通过拟合的圆柱面构造中心轴线1;
21.8)通过测头运动遥控手柄,移动三坐标测量机接触式测头,在o-xyz坐标系下对激光接收屏a内表面进行平面测量,至少测量5个点,拟合平面1;
22.9)中心轴线1的方程与对应的激光接收屏a平面1方程的交点坐标(x1,y1,z1),即为点激光光斑中心的空间位置坐标,记作标志点1;
23.10)将点结构光发生器沿水平方向移动一段距离,保证移动后激光光斑仍位于图像传感器a的视场范围内;
24.11)重复步骤5~9过程,记录下转动点结构光发生器光斑坐标不发生变化时的光斑中心坐标值(x2,y2)pixel,以及此时点结构光发生器外壳拟合轴线方程与激光接收屏a平面方程的交点坐标(x2,y2,z2),即为此时点激光光斑中心的空间位置坐标,记作标志点2;
25.12)将点结构光发生器放置于v型定位槽上,打开点结构光发生器,将v型定位槽靠近激光接收屏b,保证点结构光发生器在激光接收屏b上的光斑成像位于图像传感器b的视场范围内;
26.13)重复步骤4~11过程,分别记录下标志点3光斑中心在图像传感器b测量坐标系中的坐标值(x3,y3)pixel和对应的点激光光斑中心的空间位置坐标(x3,y3,z3),以及标志点4光斑中心在图像传感器b测量坐标系中的坐标值(x4,y4)pixel和对应的点激光光斑中心的空间位置坐标(x4,y4,z4);
27.14)将所述的激光分束模块装上,将平面反射镜装上;
28.15)在工控机与测量系统中,以建立的o-xyz空间位姿测量装置坐标系为测量坐标系,通过操控所述的遥控移动手柄,让探针接触测量对应的平面,每个平面至少测量五个点,测量拟合对应的激光分束镜平面、折叠光路中三块平面反射镜平面的方程;
29.16)在空间位姿测量装置坐标系下对上述光斑图像坐标及空间坐标数据进行处理,得到两坐标系间的空间位置关系。
30.而且,步骤16)中光斑图像坐标及空间坐标数据处理方法为:
31.设在三坐标测量机拟合得到的激光分束镜所在平面方程为:
[0032][0033]
其中:(a,b,c)为平面1的法向量;
[0034]
(xa,ya,za)是平面1上的点;
[0035]
设平面镜(1-4-1)所在平面方程为:
[0036][0037]
其中:(d,e,f)为该平面的法向量;
[0038]
(xb,yb,zb)是该平面上的点;
[0039]
设平面镜(1-4-2)所在平面的方程为:
[0040][0041]
其中:(g,h,i)为该平面的法向量,
[0042]
(xc,yc,zc)是该平面上的点;
[0043]
设平面镜(1_4-3)所在平面的方程为:
[0044][0045]
其中:(j,k,l)为该平面的法向量;
[0046]
(xd,yd,zd)是该平面上的点;
[0047]
设平面镜(1-4-3)所在平面的方程为:
[0048][0049]
其中:(m,n,p)为该平面的法向量;
[0050]
(xe,ye,ze)是该平面上的点;
[0051]
在工控机与测量软件中,以位姿测量装置坐标系为测量坐标系,对上述数据进行处理,求取两图像测量坐标系经过分束及折叠光路作用后在位姿测量装置坐标系o-xyz中对应的空间位置关系,在工控机与测量软件中做激光接收屏a平面及标志点1和标志点2的空间坐标点关于激光分束镜(1-3-1)平面的镜像平面r及镜像对称点,得到标志点1’和标志点2’,其空间坐标值可由三坐标测量软件读出;
[0052]
在三坐标机软件中做激光接收屏b平面及标志点3和标志点4的空间坐标点分别关
于平面反射镜(1-4-3)平面、平面反射镜(1-4-2)平面和平面反射镜(1-4-1)平面对称后的的镜像平面s及镜像对称点,得到标志点3’和标志点4’,其空间坐标值可由三坐标测量软件读出;
[0053]
设平面r的方程为:
[0054][0055]
其中:(xr,yr,zr)为平面r上的点;
[0056]
(r
x
,ry,rz:)为该平面的法向量;
[0057]
平面s的方程为:
[0058][0059]
其中:(xs,ys,zs:)为平面r上的点;
[0060]
(s
x
,sy,sz)为该平面的法向量;
[0061]
1)计算旋转角度:
[0062][0063]
2)通过所得的旋转角度,利用公知的方法对图像坐标系进行旋转,使得通过测量光路作用后的两图像坐标系旋转后与位姿测量装置测量坐标系0-xyz的y轴平行;旋转后标志点1’、2’、3’、4’的坐标值分别为(x1”,y1”,z1”)、(x2”,y2”,z2”)、(x3”,y3”,z3”)和(x4”,y4”,z4”);
[0064]
3)计算两图像传感器转换系数:
[0065][0066]
4)设图像传感器像素值为x0、y0 pixel,计算经光路作用后两图像坐标系原点在位姿测量坐标系中的空间位置:以图像传感器a在激光接收屏a上的图像坐标系为例说明:
[0067]
设坐标系原点在位姿测量坐标系中的三维坐标为(x0,y0,z0),经光路作用后,由于原点处于平面r上,因此满足平面方程:
[0068][0069]
原点(x0,y0,z0)距离oxy平面的距离为l=k1
·
y1 z1
″
,即
[0070]
z0=k1
·
y1 z1
″
[0071]
原点(x0,y0,z0)距离oyz平面的距离为l
′
=k1
·
x1 y1
″
,即
[0072]
y0=k1
·
x1 y1
″
[0073]
联立以上3式可得图像坐标系1原点在测量坐标系o-xyz中的坐标值;同理,可得图像坐标系2原点在测量坐标系o-xyz中的坐标值,结合激光接收屏a、b方程,可得两坐标系间的关系。
[0074]
本发明的优点和有益效果为:
[0075]
1、本发明的视觉测量模块测量坐标系空间位置关系标定系统及方法,解决了因接收屏遮挡带来的多图像传感系统测量坐标系关系无法利用传统方法标定的问题,可以实现空间位姿测量装置中视觉测量模块图像测量坐标系空间位置关系的接触式精确标定。
[0076]
2、本发明的视觉测量模块测量坐标系空间位置关系标定系统及方法,可以快速实现位姿测量装置中两机器视觉测量模块图像测量坐标系空间位置关系的精确标定,可以实
现二维图像测量坐标系中二维平面坐标到三维空间坐标的转化,将抽象的光斑成像中心实物化,实现空间图像点的三维坐标在三坐标测量机的接触式测量。本发明主要用于空间位姿测量装置中视觉测量模块图像测量坐标系空间位置关系的标定,保证空间位姿测量装置的测量精度。
附图说明
[0077]
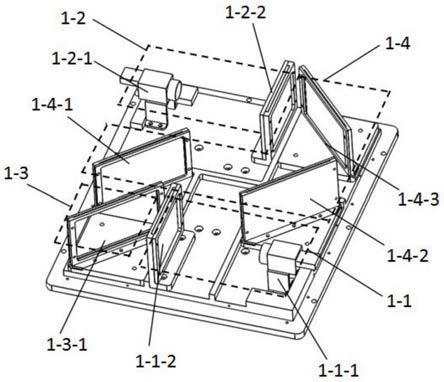
图1为本发明的空间位姿测量装置结构示意图;
[0078]
图2为本发明的标定过程示意图;
[0079]
图3为本发明的标定细节示意图。
[0080]
附图标记说明
[0081]
1-1:图像传感模块a;1-2:图像传感模块b;1-3:激光分束模块;1-4:折叠光路模块;1-1-1:图像传感器a;1-1-2:激光接收屏a;1-2-1:图像传感器b;1-2-2:激光接收屏b;1-3-1:激光分束镜;1-4-1:平面反射镜1;1-4-2:平面反射镜2;1-4-3:平面反射镜3;2-1:空间位姿测量装置;2-2:三坐标测量机;2-3:工控机与测量软件;2-4:工控机与测量系统;2-2-1:测头运动遥控手柄;2-2-2:接触式测头;3-1:空间位姿测量坐标系x轴;3-2:空间位姿测量坐标系y轴;3-3:空间位姿测量坐标系z轴;3-4:v定位型槽;3-5:点结构光发生器。
具体实施方式
[0082]
下面通过具体实施例对本发明作进一步详述,以下实施例只是描述性的,不是限定性的,不能以此限定本发明的保护范围。
[0083]
一种视觉测量模块测量坐标系空间位置关系标定系统,其创新之处在于:所述标定系统包括空间位姿测量装置2-1、点结构光发生器3-5、v型定位槽3-4及三坐标测量机2-2,
[0084]
所述点结构光发生器3-5,用于产生点结构光,提供标定过程中图像传感器采集的点光斑图像;
[0085]
所述v型定位槽3-4,用于标定过程中安装点结构光发生器;
[0086]
所述三坐标测量机2-2,包括接触式测头2-2-2、大理石测量平台、测头运动遥控手柄2-2-1及工控机与测量系统2-4,用以实现标定过程中的空间坐标点的接触式测量;
[0087]
所述空间空间位姿测量装置2-1包括两套图像采集单元、激光分束与折射光路单元、工控机与测量软件2-3,所述图像采集单元包括图像传感模块a1-1、图像传感模块b1-2、激光接收屏a1-1-2、激光接收屏b1-2-2、图像传感器a1-1-1及图像传感器b1-2-1,所述激光分束与折射光路单元包括激光分束模块1-3及折射光路模块1-4,所述图像传感器a1-1-1及图像传感器b1-2-1分别固定连接于所述激光接收屏a1-1-2、激光接收屏b1-2-2后侧,用以采集激光接收屏上的激光光斑图像;所述工控机与测量软件2-3通过usb与所述图像传感器a1-1-1、图像传感器b1-2-1连接,实现对图像传感器图像信号的采集,通过测量软件实现光斑中心坐标的提取。
[0088]
激光接收屏a1-1-2、激光接收屏b1-2-2均为透明亚克力板制成,且所述激光接收屏a1-1-2、激光接收屏b1-2-2外侧涂镀有纳米漫反射涂层。
[0089]
一种视觉测量模块测量坐标系空间位置关系标定方法,其特征在于:所述标定方
法的步骤为:
[0090]
1)在所述空间位姿测量装置的激光接收屏a、激光接收屏b内侧贴放薄板棋盘网格,通过公知的相机畸变校正方法对图像传感器a及图像传感器b的透视畸变和径向畸变分别进行校正,使得校正后的图像传感器a及图像传感器b的光轴垂直于激光接收屏所在平面;
[0091]
2)将所述的激光分束模块取下,将所述激光分束模块的平面反射镜取下;
[0092]
3)将所述的空间位姿测量装置放置于所述的三坐标测量机的大理石测量平台上,启动三坐标测量机,打开工控机与测量系统,建立空间位姿测量装置坐标系o-xyz;
[0093]
4)将点结构光发生器放置于v型定位槽上,打开点结构光发生器,将v型定位槽靠近激光接收屏a,保证点结构光发生器3-5在激光接收屏a上的光斑成像位于图像传感器a的视场范围内;
[0094]
5)使v型定位槽轴线垂直激光接收屏a放置,保证点结构光发生器的端面紧密贴合在激光接收屏a上,通过工控机与测量软件读出此时图像传感器采集到的图像光斑中心点坐标值;
[0095]
6)在v型定位槽内转动点结构光发生器,观察工控机与测量软件中图像光斑中心坐标值,不断调整点结构光发生器的镜头端面使其紧密贴合在激光接收屏a上,保证点结构光发生器在转动的过程中,工控机与测量软件中的激光光斑中心坐标值不再发生变化,表明激光光斑中心与点结构光发生器外壳的轴线重合,且点结构光发生器轴线垂直于激光接收屏a,记录下此时的光斑中心坐标值(x1,y1)pixel,并将点结构光发生器与v型定位槽通过压紧装置固定,并且保持与接收屏位置关系不变;
[0096]
7)通过测头运动遥控手柄,移动三坐标测量机接触式测头,在o-xyz坐标系下对点结构光发生器外壳表面进行圆柱测量,至少测量5个点,拟合圆柱面,进而通过拟合的圆柱面构造中心轴线1;
[0097]
8)通过测头运动遥控手柄,移动三坐标测量机接触式测头,在o-xyz坐标系下对激光接收屏a内表面进行平面测量,至少测量5个点,拟合平面1;
[0098]
9)中心轴线1的方程与对应的激光接收屏a平面1方程的交点坐标(x1,y1,z1),即为点激光光斑中心的空间位置坐标,记作标志点1;
[0099]
10)将点结构光发生器沿水平方向移动一段距离,保证移动后激光光斑仍位于图像传感器a的视场范围内;
[0100]
11)重复步骤5~9过程,记录下转动点结构光发生器光斑坐标不发生变化时的光斑中心坐标值(x2,y2)pixel,以及此时点结构光发生器外壳拟合轴线方程与激光接收屏a平面方程的交点坐标(x2,y2,z2),即为此时点激光光斑中心的空间位置坐标,记作标志点2;
[0101]
12)将点结构光发生器放置于v型定位槽上,打开点结构光发生器,将v型定位槽靠近激光接收屏b,保证点结构光发生器在激光接收屏b上的光斑成像位于图像传感器b的视场范围内;
[0102]
13)重复步骤4~11过程,分别记录下标志点3光斑中心在图像传感器b测量坐标系中的坐标值(x3,y3)pixel和对应的点激光光斑中心的空间位置坐标(x3,y3,z3),以及标志点4光斑中心在图像传感器b测量坐标系中的坐标值(x4,y4)pixel和对应的点激光光斑中
心的空间位置坐标(x4,y4,z4);
[0103]
14)将所述的激光分束模块装上,将平面反射镜装上;
[0104]
15)在工控机与测量系统中,以建立的o-xyz空间位姿测量装置坐标系为测量坐标系,通过操控所述的遥控移动手柄,让探针接触测量对应的平面,每个平面至少测量五个点,测量拟合对应的激光分束镜平面、折叠光路中三块平面反射镜平面的方程;
[0105]
16)在空间位姿测量装置坐标系下对上述光斑图像坐标及空间坐标数据进行处理,得到两坐标系间的空间位置关系。
[0106]
而且,步骤16)中光斑图像坐标及空间坐标数据处理方法为:
[0107]
设在三坐标测量机拟合得到的激光分束镜所在平面方程为:
[0108][0109]
其中:(a,b,c)为平面1的法向量;
[0110]
(xa,ya,za)是平面1上的点;
[0111]
设平面镜(1-4-1)所在平面方程为:
[0112][0113]
其中:(d,e,f)为该平面的法向量;
[0114]
(xb,yb,zb)是该平面上的点;
[0115]
设平面镜(1-4-2)所在平面的方程为:
[0116][0117]
其中:(g,h,i)为该平面的法向量,
[0118]
(xc,yc,zc)是该平面上的点;
[0119]
设平面镜(1-4-3)所在平面的方程为:
[0120][0121]
其中:(j,k,l)为该平面的法向量;
[0122]
(xd,yd,zd)是该平面上的点;
[0123]
设平面镜(1_4-3)所在平面的方程为:
[0124][0125]
其中:(m,n,p)为该平面的法向量;
[0126]
(xe,ye,ze)是该平面上的点;
[0127]
在工控机与测量软件中,以位姿测量装置坐标系为测量坐标系,对上述数据进行处理,求取两图像测量坐标系经过分束及折叠光路作用后在位姿测量装置坐标系o-xyz中对应的空间位置关系,在工控机与测量软件中做激光接收屏a平面及标志点1和标志点2的空间坐标点关于激光分束镜(1-3-1)平面的镜像平面r及镜像对称点,得到标志点1’和标志点2’,其空间坐标值可由三坐标测量软件读出;
[0128]
在三坐标机软件中做激光接收屏b平面及标志点3和标志点4的空间坐标点分别关于平面反射镜(1-4-3)平面、平面反射镜(1-4-2)平面和平面反射镜(1-4-1)平面对称后的的镜像平面s及镜像对称点,得到标志点3’和标志点4’,其空间坐标值可由三坐标测量软件读出;
[0129]
设平面r的方程为:
[0130][0131]
其中:(xr,yr,zr)为平面r上的点;
[0132]
(r
x
,ry,rz:)为该平面的法向量;
[0133]
平面s的方程为:
[0134][0135]
其中:(xs,ys,zs:)为平面r上的点;
[0136]
(s
x
,sy,sz)为该平面的法向量;
[0137]
1)计算旋转角度:
[0138][0139]
4)通过所得的旋转角度,利用公知的方法对图像坐标系进行旋转,使得通过测量光路作用后的两图像坐标系旋转后与位姿测量装置测量坐标系0-xyz的y轴平行;旋转后标志点1’、2’、3’、4’的坐标值分别为(x1”,y1”,z1”)、(x2”,y2”,z2”)、(x3”,y3”,z3”)和(x4”,y4”,z4”);
[0140]
5)计算两图像传感器转换系数:
[0141][0142]
4)设图像传感器像素值为x0、y0 pixel,计算经光路作用后两图像坐标系原点在位姿测量坐标系中的空间位置:以图像传感器a在激光接收屏a上的图像坐标系为例说明:
[0143]
设坐标系原点在位姿测量坐标系中的三维坐标为(x0,y0,z0),经光路作用后,由于原点处于平面r上,因此满足平面方程:
[0144][0145]
原点(x0,y0,z0)距离oxy平面的距离为l=k1
·
y1 z1
″
,即
[0146]
z0=k1
·
y1 z1
″
[0147]
原点(x0,y0,z0)距离oyz平面的距离为l
′
=k1
·
x1 y1
″
,即
[0148]
y0=k1
·
x1 y1
″
[0149]
联立以上3式可得图像坐标系1原点在测量坐标系o-xyz中的坐标值;同理,可得图像坐标系2原点在测量坐标系o-xyz中的坐标值,结合激光接收屏a、b方程,可得两坐标系间的关系。
[0150]
尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施例和附图所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。