技术特征:
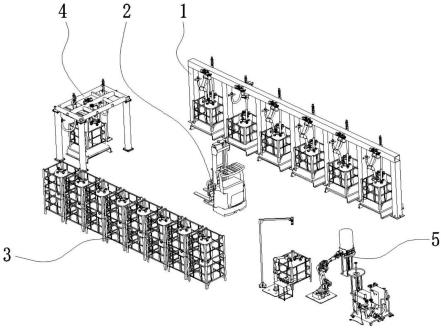
1.一种自动灌装、配送及清洗糖液的机器人系统装置,机器人系统主要包括:糖液自动对接灌装机器人分系统(1)、自动叉车配送分系统(2)、立体库位缓存分系统(3)、糖液自动对接卸料机器人分系统(4)、料罐自动清洗机器人分系统(5)和主控调度系统,其特征在于,所述糖液自动对接灌装机器人分系统(1)设置有六个灌装工位,立体库位缓存分系统(3)设置有双层库位,料罐设置有可与机器人自动对接的罐塞(61)和罐盖(64),料框内料上的信息,以通用编码器数据格式存储在立库管理系统中,主控调度系统与立库管理系统采用通用通信协议实现数据交换,自动叉车配送分系统(2)主控调度系统之间通过无线局域网连接,叉车在预设路径上自动导航配送,货叉设置有物料信息读取设备,非接触读取料框对应的编码信息,叉车为激光导航叉车,叉车四周有安全壁障传感器,货叉设置有rfid读卡器;所述糖液自动对接灌装机器人分系统(1)主要包括:视觉识别定位相机(17)、多关节机械臂(16)、末端夹爪(161)、自动称重地秤(11)、灌装管路(15)和管接头(151),视觉识别定位相机(17)采用3d机器视觉相机,视觉相机固定安装在料框(12)的上方,相机视野范围覆盖全部料框(12),通过3d视觉相机对料罐中的罐塞(61)和罐盖(64)的类型进行识别,获取罐塞(61)和罐盖(64)位置姿态,为多关节机械臂(16)作业提供位姿的信息输入;所述自动称重地秤(11)固定安装在灌装工位地面上,地秤底面架空高度大于自动叉车的货叉高度,地秤台面尺寸大于料框投影尺寸,称重范围大于料框、料罐及糖液重量总和,地秤设置有数据控制接口,地秤与料框接触面设置有rfid信息写入设备。2.根据权利要求1所述的一种自动灌装、配送及清洗糖液的机器人系统,其特征在于,所述料罐由罐体(60)、罐盖(64)和罐塞(61)组成,罐体(60)设置有一个灌装罐口(66)、一个卸料罐口(67)和两个暂存罐口(65),末端夹爪(161)采用气动二指夹爪,气动电磁阀为编程可控,固定安装在多关节机械臂(16)的末端,二指夹爪的夹口与管接头(151)圆柱面形状匹配,罐塞(61)和罐盖(64)顶部设置有与末端夹爪(161)配合的夹持位,夹持位与管接头圆柱面形状相同,末端夹爪(161)可以实现对管接头(151)、罐塞(61)和罐盖(64)的夹持,罐塞(61)和罐盖(64)端面设置有软磁片(63),罐口端面与软磁片(63)吸合密封,软磁片(63)同时具备密封的效果,罐体(60)底面和顶面设置为锥面,卸料罐口(67)直通连接吸料管(68),吸料管(68)尾部弯曲至罐体(60)的锥底。3.根据权利要求2所述的一种自动灌装、配送及清洗糖液的机器人系统,其特征在于,所述罐体(60)外圆周设置有凸环(62),与气动抱夹的夹持面凹槽配合,灌装管路(15)的一端连接糖液配制设备,另一端通过管接头(151)与料罐罐口(66)配合,罐口(66)与管接头(151)采用锥面定位,罐口端面由铁磁性材质制成,管接头(151)端面设置有电磁线圈(152),控制电路设置有电流实时检测与分析模块,(152)线圈通断励磁为编程可控,管接头(151)颈部设置有卡槽,门架(14)上的固定工装(13)与卡槽对接定位。4.根据权利要求1所述的一种自动灌装、配送及清洗糖液的机器人系统,其特征在于,所述糖液自动对接卸料机器人分系统(4)主要包括:视觉识别定位相机(17)、多关节机械臂(16)、末端夹爪(161)、自动称重地秤(11)、卸料管路(41)和加压管路(42),加压管接头、卸料管接头和灌装管接头采用相同的组成结构。5.根据权利要求1所述的一种自动灌装、配送及清洗糖液的机器人系统,其特征在于,所述料罐自动清洗机器人分系统(5)主要包括:视觉识别定位相机(17)、取盖机械臂(56)、取罐机械臂(50)、暂存工作台(52)、高压蒸汽清洗装置(53)、气流加热烘干装置(54)和气流
蒸汽发生器(51),视觉识别定位相机(17)用于识别定位料罐,取盖机械臂(56)用于取罐盖(64)和罐塞(61),取盖机械臂(56)和取罐机械臂(50)落地安装,取罐机械臂(50)末端安装有气动抱夹(55),抱夹的夹持面与罐体(60)配合,夹持面设置有凹槽,且凹槽与罐体外圆周凸环(62)嵌入配合,高压蒸汽清洗装置(53)主要由伺服升降模组(534)、清洗伸缩管(532)、旋转喷头(531)和清洗支架(533)组成,清洗伸缩管(532)与伺服升降模组(534)连接,旋转喷头(531)安装清洗伸缩管(532)的末端,清洗支架(533)设置有积水盘,积水盘与清洗伸缩管(532)之间设计有滑动密封(536)。6.根据权利要求1-5任一项所述的一种自动灌装、配送及清洗糖液的机器人系统的使用方法,其特征在于,所述使用方法包括以下步骤:步骤一:生产管理系统根据生产工艺要求,发布糖液需求信息;步骤二:立体库位缓存分系统查询所需糖液信息;步骤三:若立体库位有所需糖液的缓存,则主控调度系统调度叉车到糖液库位;步骤四:叉车自动读取并核对料框标签信息,配送糖液至自动卸料工位;步骤五:若立体库位没有所需糖液的缓存,则立体库位缓存分系统查询空料罐料框库位信息;步骤六:主控调度系统调度叉车到空料罐料框库位;步骤七:叉车自动读取并核对料框标签信息,配送空料罐料框至自动灌装工位;步骤八:糖液自动对接灌装机器人分系统对糖液进行灌装;步骤九:灌装结束,主控调度系统调度叉车到灌装工位;步骤十:叉车自动读取并核对料框标签信息,配送糖液至自动卸料工位;步骤十一:糖液自动对接卸料机器人分系统对糖液进行卸料;步骤十二:卸料完成,主控调度系统调度叉车到卸料工位步骤十三:叉车自动读取并核对料框标签信息,判断料罐使用时间;步骤十四:若料罐使用时间超过设定值,则叉车配送至自动清洗工位;步骤十五:清洗完成,主控调度系统调度叉车到自动清洗工位;步骤十六:叉车自动读取并核对料框标签信息,配送回立体库位缓存分系统库位;步骤十七:若料罐使用时间未超过设定值,则叉车直接配送回立体库位缓存分系统库位。7.根据权利要求1-5任一项所述的一种自动灌装、配送及清洗糖液的机器人系统,其特征在于,所述糖液自动对接灌装机器人分系统的工作方法,分以下步骤:步骤一:rfid读取并核对料框标签信息,地秤读取空料罐料框重量并清零;步骤二:视觉相机对料罐料框拍照,识别灌装罐口的罐塞,定位罐塞的空间位姿,识别定位暂存罐口位置:步骤三:机械臂从初始折叠位置运动规划到罐塞位置;步骤四:机械臂未端夹爪夹持罐塞放置到暂存罐口位置;步骤五:机械臂未端夹爪从门架上固定工装位置夹取灌装管接头;步骤六:灌装管接头与灌装罐口对接到位;步骤七:灌装管接头电磁线圈得电,灌装罐口与管接头电磁吸合;步骤八:糖液通过灌装管路输送给料罐;
步骤九:根据流量和地秤重量数据判断灌装完成,并停止灌装;步骤十:机械臂未端夹爪夹取管接头,管接头电磁线圈失电;步骤十一:机械臂运动到门架上固定工装位置放回灌装管路管接头;步骤十二:机械臂从暂存罐口位置夹取罐塞,放回灌装罐口位置;步骤十三:机械臂运动回初始折叠位置;步骤十四:通过rfid设备写入状态信息到料框标签;步骤十五:灌装完成,向主控调度系统发送状态完成信息。8.根据权利要求1-5任一项所述的一种自动灌装、配送及清洗糖液的机器人系统,其特征在于,所述料罐自动清洗机器人分系统的工作方法,分以下步骤:步骤一:视觉相机对料罐料框拍照,识别罐塞、罐盖和罐体,并定位空间位姿;步骤二:取盖机械臂根据空间位姿,分别夹取罐塞和罐盖到暂存工作台;步骤三:取罐机械臂根据空间位姿,夹持罐体并从料框中取出;步骤四:取罐机械臂将罐体旋转至罐口朝下;步骤五:取罐机械臂将罐体移动至高压蒸汽清洗装置上方;步骤六:高压清洗装置启动,上下往复对罐内壁进行清洗;步骤七:取罐机械臂将罐体移动至气流加热烘干装置上方;步骤八:气流加热烘干装置启动,上下往复对罐内壁进行烘干;步骤九:取罐机械臂将罐体放回料框;步骤十:视觉相机对料罐料框拍照,识别罐口,并定位空间位姿;步骤十一:取盖机械臂从暂存工作台上夹取罐塞和罐盖放回罐口位置;步骤十二:通过rfid设备写入料框信息标签;步骤十三:清洗完成,向主控调度系统发送状态完成信息。
技术总结
本发明涉及食品生产自动化技术领域,提供了一种自动灌装、配送及清洗糖液的机器人系统及方法,机器人系统主要包括糖液自动对接灌装机器人分系统、自动叉车配送分系统、立体库位缓存分系统、糖液自动对接卸料机器人分系统、料罐自动清洗机器人分系统和主控调度系统。本发明采用机器人系统技术方案,实现了糖液从灌装、配送到清洗全流程的自动化,提高生产了生产效率;系统可替代糖液管道输送系统,简化了生产工艺,增强了生产柔性;系统更方便对接生产管理系统,实现工厂生产的智能制造。实现工厂生产的智能制造。实现工厂生产的智能制造。
技术研发人员:金力 凌六一 王成军 夏科睿 李小龙
受保护的技术使用者:安徽理工大学
技术研发日:2022.08.22
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。