1.本发明属于环境消杀设备,尤其涉及一种自动避障消杀机器人。
背景技术:
2.对于新冠疫情的防控,对公共区域进行定时的消杀,是保证公共安全的一项重要举措。现有的消杀,通常是安排人工每天进行,费时费力,也容易遗漏。现也有一些自动消杀的机器人,利用激光雷达获取机器人周围的环境信息并记录在各个方向上的障碍物的距离,控制系统利用激光雷达的数据,判断障碍物是否在安全区域,进而进行避障。但是在实际情况中,常存在控制系统判断障碍物的距离近,但实际上机器人可能并不会与障碍物碰撞,会迫使机器人立即紧急制动,从而导致导航和消杀无法完成,使得消杀不到位,存在很多遗漏。为此,人们需要一个既省力、消杀范围又能得到保障的消杀方法,并能够实现多层不同高度平面的消杀。
技术实现要素:
3.本发明所要解决的技术问题是提供一种自动避障消杀机器人。
4.本发明是通过以下技术方案来实现的:自动避障消杀机器人,包括行走装置、安装在行走装置上的控制系统和分别与控制系统电性连接的避障系统和消杀喷雾系统,所述行走装置包括车体以及驱动车体行走的驱动装置,所述避障系统包括激光雷达、测距仪和超声波雷达,所述消杀喷雾系统包括设置在主体上方的喷头和通过泵送装置给喷头供药的储药箱;所述避障系统将采集到的信息以数据的形式传输给所述控制系统,通过控制系统控制行走装置及消杀喷雾系统的动作,车体上设置有显示各项信息的显示屏;所述消杀机器人避障消杀的方法包括如下步骤:(1)扫描构图:采用激光雷达扫描和测距仪测距对消杀作业环境进行环境数据采集,扫描数据与障碍物的扫描点对应,记录消杀机器人在各个方向与障碍物之间的距离;(2)定位规划:每个消杀空间四角设置定位基桩,通过定位基桩给消杀机器人三轴定位,消杀机器人通过发射数据和接受数据的时间差来判断到各个基桩的距离,基桩之间有水平基准线,可判断消杀机器人高度位置,依照构图信息产生最优行走路径,形成横向和纵向路径格栅;(3)避障消杀:根据路径规划进行消杀时,测距仪实时检测消杀机器人在运动方向上是否有障碍物,当存在障碍物时,通过测距仪获取清扫机器人当前位置与障碍物扫描点之间的距离以及障碍物占据区域的面积信息,并确定是固定障碍物还是移动障碍物,根据消杀机器人的位置以及路径规划信息判断是否存在障碍物碰撞可能,将消杀机器人与障碍物之间分为安全区域、减速区域和制动区域,确定路径后,移动并喷头喷药进行消杀,若遇到突发的移动障碍物,消杀机器人通过超声波雷达检测到突发的移动障碍物,制动停车并停止喷药,在设定时间内,若移动障碍物离开,消杀机器人继续按照轨迹行驶并喷药,若移动障碍物在设定时间内不离开,则以特定半径绕行,进入预先设计路径后继续喷药;
(4)回程补喷:记录移动障碍物的位置,回程时按照最近路线到达未喷洒的记录点进行补喷。
5.作为优选,所述喷头包括一主供药杆和与主供药杆连接的沿圆周方向均匀分布的2-4个分喷头,分喷头的喷射方向朝外。
6.作为优选,所述车体内设置有电源。
7.作为优选,所述行走装置上还设置有交互面板,所述交互面板上设置有多个分别与所述控制系统电性连接的按键,所述按键包括喷头喷雾流量调节按键。
8.作为优选,所述车体上还安装有语音播放系统。
9.作为优选,所述车体内设置检测摔倒的三轴陀螺仪,在摔倒后对消杀机器人进行停车停喷,并报警。
10.本发明的有益效果是:本发明的自动避障消杀机器人,结构巧妙,通过先对需消杀作业的空间进行精确扫描,利于消杀机器人规避障碍物,避障合理,避免碰撞的同时还消杀到位,自动化程度高,且没有消杀遗漏,适用范围广,特别适用于车站等公共区域消杀使用,并实现多层平面消杀,实用性强,值得推广。
附图说明
11.为了易于说明,本发明由下述的具体实施例及附图作以详细描述。
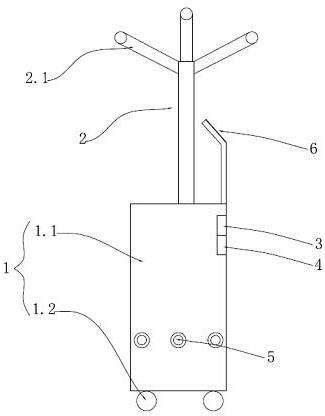
12.图1为本发明实施例的结构示意图;图2为本发明实施例工作时的扫描示意图;图3为本发明可消杀的空间结构示意图;图4为本发明实施例工作时可规划的消杀路径示意图;图5为本发明l3高度计算的示意图。
具体实施方式
13.如图1-4所示,自动避障消杀机器人,包括行走装置1、安装在行走装置1 上的控制系统和分别与控制系统电性连接的避障系统和消杀喷雾系统2,所述行 走装置1包括车体1.1以及驱动车体行走的驱动装置1.2,驱动装置为电机带动 轮子进行主动行驶,所述避障系统包括激光雷达3、测距仪4和超声波雷达5, 所述消杀喷雾系统2包括设置在主体上方的喷头2.1和通过泵送装置给喷头供 药的储药箱;所述避障系统将采集到的信息以数据的形式传输给所述控制系统, 通过控制系统控制行走装置及消杀喷雾系统2的动作,车体上设置有显示各项 信息的显示屏6;所述消杀机器人避障消杀的方法包括如下步骤:(1)扫描构图:采用激光雷达扫描和测距仪测距对消杀作业环境进行环境数 据采集,扫描数据与障碍物的扫描点对应,记录消杀机器人在各个方向与障碍 物之间的距离;(2)定位规划:每个消杀空间四角设置定位基桩7,通过定位基桩7给消杀机器 人三轴定位,消杀机器人通过发射数据和接受数据的时间差来判断到各个基桩7 的距离,基桩7之间有水平基准线,可判断消杀机器人高度位置,依照构图信 息产生最优行走路径,形成横向和纵向路径格栅,从消杀机器人发射信号给四 个基桩,并测量基桩返回波的时间,如图5所示,计算出l1的长度,基桩与基 桩之间发射有基准线的一半l2的长度,就能计算出
l3的长度,根据l3的高度位置能够反应出消杀机器人所在楼层信息,能够在区域内实现多 层消杀的作用定位精准;(3)避障消杀:根据路径规划进行消杀时,测距仪实时检测消杀机器人在运 动方向上是否有障碍物,当存在障碍物时,通过测距仪获取清扫机器人当前位 置与障碍物扫描点之间的距离以及障碍物占据区域的面积信息,并确定是固定 障碍物还是移动障碍物,根据消杀机器人的位置以及路径规划信息判断是否存 在障碍物碰撞可能,将消杀机器人与障碍物之间分为安全区域、减速区域和制 动区域,确定路径后,移动并喷头喷药进行消杀,若遇到突发的移动障碍物, 消杀机器人通过超声波雷达检测到突发的移动障碍物,制动停车并停止喷药, 在设定时间内,若移动障碍物离开,消杀机器人继续按照轨迹行驶并喷药,若 移动障碍物在设定时间内不离开,则以特定半径绕行,进入预先设计路径后继 续喷药;
14.所述喷头包括一主供药杆和与主供药杆连接的沿圆周方向均匀分布的2-4个分喷头,分喷头的喷射方向朝外。
15.所述车体内设置有电源。
16.所述行走装置上还设置有交互面板,所述交互面板上设置有多个分别与所述控制系统电性连接的按键,所述按键包括喷头喷雾流量调节按键。
17.所述车体上还安装有语音播放系统。
18.所述车体内设置检测摔倒的三轴陀螺仪,在摔倒后对消杀机器人进行停车停喷,并报警。
19.工作过程中,通过激光雷达3和测距仪4对环境进行探测扫描构图并存储障碍物位置,定位消杀机器人位置并规划行走路线,行走路线为横向格栅和纵向格栅,避免死角,消杀过程中如遇到突发的移动障碍物,通过超声波雷达检测到后停车并停喷,待设定的2分钟后移动障碍物不离开,则避障绕行,记录未喷洒位置,当喷洒完成后,回程中进行未喷洒记录点补喷,通过基桩7实现高度位置定位,并实现多层喷洒,如行驶中倾倒,三轴陀螺仪检测到后,停车停喷并报警,如检测到坡度可配合驱动装置进行爬坡。
20.本发明的自动避障消杀机器人,结构巧妙,通过先对需消杀作业的空间进行精确扫描,利于消杀机器人规避障碍物,避障合理,避免碰撞的同时还消杀到位,自动化程度高,且没有消杀遗漏,适用范围广,特别适用于车站等公共区域消杀使用,实用性强,值得推广以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
