技术特征:
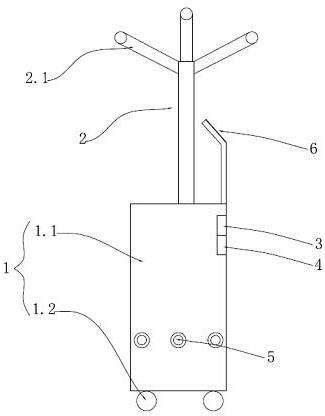
1.自动避障消杀机器人,其特征在于,包括行走装置、安装在行走装置上的控制系统和分别与控制系统电性连接的避障系统和消杀喷雾系统,所述行走装置包括车体以及驱动车体行走的驱动装置,所述避障系统包括激光雷达、测距仪和超声波雷达,所述消杀喷雾系统包括设置在主体上方的喷头和通过泵送装置给喷头供药的储药箱;所述避障系统将采集到的信息以数据的形式传输给所述控制系统,通过控制系统控制行走装置及消杀喷雾系统的动作,车体上设置有显示各项信息的显示屏6;所述消杀机器人避障消杀的方法包括如下步骤:(1)扫描构图:采用激光雷达扫描和测距仪测距对消杀作业环境进行环境数据采集,扫描数据与障碍物的扫描点对应,记录消杀机器人在各个方向与障碍物之间的距离;(2)定位规划:每个消杀空间四角设置定位基桩,通过定位基桩给消杀机器人三轴定位,消杀机器人通过发射数据和接受数据的时间差来判断到各个基桩的距离,基桩之间有水平基准线,可判断消杀机器人高度位置,依照构图信息产生最优行走路径,形成横向和纵向路径格栅;(3)避障消杀:根据路径规划进行消杀时,测距仪实时检测消杀机器人在运动方向上是否有障碍物,当存在障碍物时,通过测距仪获取清扫机器人当前位置与障碍物扫描点之间的距离以及障碍物占据区域的面积信息,并确定是固定障碍物还是移动障碍物,根据消杀机器人的位置以及路径规划信息判断是否存在障碍物碰撞可能,将消杀机器人与障碍物之间分为安全区域、减速区域和制动区域,确定路径后,移动并喷头喷药进行消杀,若遇到突发的移动障碍物,消杀机器人通过超声波雷达检测到突发的移动障碍物,制动停车并停止喷药,在设定时间内,若移动障碍物离开,消杀机器人继续按照轨迹行驶并喷药,若移动障碍物在设定时间内不离开,则以特定半径绕行,进入预先设计路径后继续喷药;(4)回程补喷:记录移动障碍物的位置,回程时按照最近路线到达未喷洒的记录点进行补喷。2.根据权利要求1所述的自动避障消杀机器人,其特征在于,所述喷头包括一主供药杆和与主供药杆连接的沿圆周方向均匀分布的2-4个分喷头,分喷头的喷射方向朝外。3.根据权利要求1所述的自动避障消杀机器人,其特征在于,所述车体内设置有电源。4.根据权利要求1所述的自动避障消杀机器人,其特征在于,所述行走装置上还设置有交互面板,所述交互面板上设置有多个分别与所述控制系统电性连接的按键,所述按键包括喷头喷雾流量调节按键。5.根据权利要求1所述的自动避障消杀机器人,其特征在于,所述车体上还安装有语音播放系统。6.根据权利要求1所述的自动避障消杀机器人,其特征在于,所述车体内设置检测摔倒的三轴陀螺仪,在摔倒后对消杀机器人进行停车停喷,并报警。
技术总结
本发明公开了一种自动避障消杀机器人,包括行走装置、安装在行走装置上的控制系统和分别与控制系统电性连接的避障系统和消杀喷雾系统,所述行走装置包括车体以及驱动车体行走的驱动装置,所述避障系统包括激光雷达和测距仪,所述消杀喷雾系统包括设置在主体上方的喷头和通过泵送装置给喷头供药的储药箱;所述避障系统将采集到的信息以数据的形式传输给所述控制系统,通过控制系统控制行走装置及消杀喷雾系统的动作。本发明的自动避障消杀机器人,结构巧妙,通过先对需消杀作业的空间进行精确扫描,避障合理,消杀过程避免碰撞的同时还消杀到位,自动化程度高,没有消杀遗漏,特别适用于车站等公共区域消杀使用。适用于车站等公共区域消杀使用。适用于车站等公共区域消杀使用。
技术研发人员:郭会芹 陈龙涛
受保护的技术使用者:江苏尚柯智能科技有限公司
技术研发日:2022.08.02
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。