1.本发明涉及工程机械领域,特别是一种三电动缸与一电机混合驱动挖掘机构。
背景技术:
2.挖掘机是现今工程机械领域最为重要的一种工程机械,广泛应用于各类施工工作当中,有效降低了人们的工作强度,并提高了工作效率,因为液压传动具有体积小、重量轻,容易实现过载保护等优点,如今的大部分挖掘机都采用了液压传动,但是,采用液压传动的挖掘机也存在着许多不足和缺点,首先,液压系统制造精度要求高,工艺复杂且成本较高,液压元件维护保养要求高,且须较高的技术水平,其次,液压传动容易受温度变化影响,不易在很高或很低的温度下工作,液压油受温度影响较大,总效率低,有时有噪音和振动。
3.随着数控技术的发展和机械工业水平的提高,工程机械的数控化是工程机械领域新的发展趋势,数控技术与工程机械的结合可使工程机械性能得到质的提高,因其具有结构简单,容易控制,维护保养简单,制造成本低等诸多优点,因此具有广阔的发展空间。现有的一些多连杆电力驱动的挖掘机构,虽然避免了液压系统的诸多缺点,但仍有需要完善的地方,有些多连杆电力驱动的挖掘机构虽然机构简单,但工作空间过小,有些虽然保证了工作空间,但存在着连杆传动部分庞大,机构复杂,重量过大等缺点。
技术实现要素:
4.本发明的目的是为解决背景技术中指出的多连杆电力驱动的挖掘机构为保证工作空间而存在的连杆传动部分庞大,结构复杂,重力过大的缺点,提供一种三电动缸与一电机混合驱动挖掘机构,该挖掘机构具有液压挖掘机构的工作空间大,灵活性好的优点,避免液压挖掘机构液压元件制造精度要求高、液压油受温度影响严重、液压系统发生故障不易检查和排除的缺点。
5.本发明通过以下技术方案达到上述目的:一种三电动缸与一电机混合驱动挖掘机构,组成构件包括机架、动臂抬升机构、斗杆举降机构以及铲斗翻转机构,组成构件的结构和连接关系为:
6.所述动臂抬升机构由动臂和抬升机构组成,所述动臂通过第一铰链连接到机架上,所述抬升机构由第一主动杆和第一电动缸组成,第一伺服电机设置在机架上,所述第一主动杆的一端与第一伺服电机的转动轴固定连接,第一主动杆另一端通过第三铰链与第一电动缸的一端相连,第一电动缸另一端通过第四铰链连接到动臂上;
7.所述斗杆举降机构由斗杆和举将机构组成,所述斗杆通过第五铰链连接在动臂的一端上,所述举降机构由第二电动缸和第一连杆组成,第二电动缸一端通过第六铰链连接到机架上,另一端通过第一螺纹孔与第一连杆的一端相连,第一连杆另一端通过第七铰链与斗杆的一端相连,斗杆的另一端通过第十三铰链连接铲斗;
8.所述铲斗翻转机构由铲斗和翻转机构组成,所述铲斗通过第十三铰链连接到斗杆上,所述翻转机构由第三电动缸、第二连杆、第三连杆、第四连杆、第五连杆和第六连杆组
成,所述第三电动缸一端通过第八铰链与机架相连,另一端通过与第二连杆的一端相连,第二连杆另一端通过第九铰链与第三连杆的一端相连,第三连杆另一端通过第十一铰链与第六连杆的一端相连,第六连杆另一端通过第十四铰链与铲斗相连,第四连杆一端通过第五铰链与斗杆相连,第四连杆另一端通过第十铰链与第三连杆相连;第五连杆一端通过第十二铰链与斗杆相连,另一端通过第十一铰链与第六连杆相连;
9.蓄电池设置在机架上,蓄电池与第一伺服电机、第一电动缸、第二电动缸以及第三电动缸通过电线电缆连接。
10.所述机架通过回转机构安装在行走机构上。
11.所述第一主动杆由第一伺服电机驱动。
12.所述第一电动缸、第二电动缸、第三电动缸均带有各自的伺服电机,电动缸均与各自的伺服电机连为一体。伺服电机通过蓄电池为其提供电力。
13.本发明的突出优点在于:
14.1.输出运动由多个原动件共同决定,是多自变量的函数,通过适当的控制程序就可实现复杂的运动规律,改变控制程序即可改变机构的输出运动,亦输出的柔性化。
15.2.采用全新的连杆机构,不仅具有液压传动挖掘机的工作空间大和灵活度高等优点,而且相比其它多连杆电力驱动的挖掘机构,减少了连杆数量,简化了连杆传动部分,结构简单,降低了传动部分的重量,提高了挖掘机构的动力学性能。
16.3.由于采用多连杆机构代替了液压传动,避免了液压挖掘机液压元件制造精度要求高、液压油受温度影响严重、液压系统发生故障不易检查和排除等缺点。
17.4.由于该挖掘机构采用伺服电机驱动系统作为动力装置,运用计算机技术对挖掘机的作业过程进行控制,从根本上提升了挖掘机的性能,使该挖掘机具有广阔的市场发展潜力。
附图说明
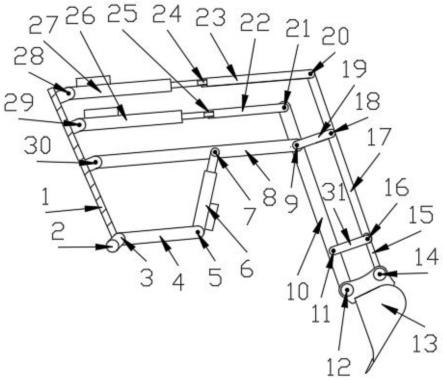
18.图1为本发明所述的三电动缸与一电机混合驱动挖掘机构的结构示意图。
19.图2为本发明所述的三电动缸与一电机混合驱动挖掘机构的动臂抬升机构示意图。
20.图3为本发明所述的三电动缸与一电机混合驱动挖掘机构的斗杆举降机构示意图。
21.图4为本发明所述的三电动缸与一电机混合驱动挖掘机构的铲斗翻转机构示意图。
22.图5为本发明所述的三电动缸与一电机混合驱动挖掘机构的第一连杆22和第二连杆23的三维示意图。
23.图6为本发明所述的三电动缸与一电机混合驱动挖掘机构的内燃机驱动伺服电机原理简图。
24.图中标记为:机架1,第一伺服电机2,第二铰孔3,第一主动杆4,第三铰链5,第一电动缸6,第四铰链7,动臂8,第五铰链9,斗杆10,第十二铰链11,第十三铰链12,铲斗13,第十四铰链14,第六连杆15,第十一铰链16,第三连杆17,第十铰链18,第四连杆19,第九铰链20,第七铰链21,第一连杆22,第二连杆23,第二螺纹孔24,第一螺纹孔25,第二电动缸26,第三
电动缸27,第八铰链28,第六铰链29,第一铰链30,第五连杆31。
具体实施方式
25.以下通过附图和实施例对本发明的技术方案作进一步详细说明。
26.对照图1,本发明所述的三电动缸与一电机混合驱动挖掘机构,包括机架1、动臂抬升机构、斗杆举降机构以及铲斗翻转机构。
27.对照图1和图2,所述动臂抬升机构由动臂8和抬升机构组成,所述动臂8通过第一铰链30连接到机架1上,所述抬升机构由第一主动杆4和第一电动缸6组成,第一伺服电机2设置在机架1上.所述第一主动杆4的一端通过第二铰孔3连接第一伺服电机2的转动轴上,另一端通过第三铰链5与第一电动缸6的一端相连,第一电动缸6的另一端通过第四铰链7连接到动臂8上。所述第一主动杆4和第一电动缸6可分别通过抬升机构带动动臂8举降。
28.对照图1、图3和图5,所述斗杆举降机构由斗杆10和举降机构组成,所述斗杆10通过第五铰链9连接在动臂的后端上,所述举降机构由第二电动缸26和第一连杆22组成,第二电动缸26一端通过第六铰链29连接到机架1上,另一端通过第一螺纹孔25与第一连杆22的一端螺纹相连,第一连杆22另一端通过第七铰链21与斗杆10相连,斗杆的另一端通过第十三铰链连接铲斗。所述第二电动缸26通过举降机构带动斗杆10举降。
29.对照图1、图4和图5,所述翻转机构由铲斗13和翻转机构组成,所述铲斗13通过第十三铰链12连接到斗杆10上,所述翻转机构由第三电动缸27、第二连杆23、第三连杆17、第四连杆19、第五连杆31、第六连杆15组成,所述第三电动缸27一端通过第八铰链28与机架1相连,另一端通过第二螺纹孔24与第二连杆23的一端螺纹相连,第二连杆23另一端通过第九铰链20与第三连杆17的一端相连,第三连杆17另一端通过第十一铰链16与第六连杆15的一端相连,第六连杆15另一端通过第十四铰链14与铲斗13相连。第四连杆19一端通过第五铰链9与斗杆10相连,另一端通过第十铰链18与第三连杆17相连。第五连杆31一端通过第十二铰链11与斗杆10相连,另一端通过第十一铰链16与第六连杆15相连。所述第三电动缸27通过翻转机构带动铲斗13翻转。
30.蓄电池设置在机架上,蓄电池与第一伺服电机、第一电动缸、第二电动缸以及第三电动缸通过电线电缆连接。
31.对照图1和图6,所述第一主动杆4由安装在机架1上的第一伺服电机2驱动,所述第一电动缸6、第二电动缸26、第三电动缸27均由各自自身一体的伺服电机驱动,可通过内燃机带动发电机为伺服电机提供电力。
32.所述动臂抬升机构、斗杆举降机构、铲斗翻转机构在电动缸的配合下共同完成挖掘作业。工作原理及过程:
33.所述一种三电动缸与一电机混合驱动挖掘机构工作原理为:如图1所示挖掘机构,动臂8的抬升是第一伺服电机2来驱动第一主动杆4,第一主动杆4带动第一电动缸6进而使动臂8抬升,斗杆10的举降是通过第二电动缸26的伸缩并通过第一连杆22来带动斗杆10举降,铲斗13的翻转是通过第三电动缸27并通过第二连杆23、第三连杆17、第四连杆19、第五连杆31、第六连杆15来带动铲斗13翻转,当第一电动缸6不伸缩时相当于一连杆,当所述挖掘机构无法满足挖掘工作需求时,可以通过第一电动缸6的伸缩来增大挖掘机构的工作空间,进而满足挖掘需求,所述一种三电动缸与一电机混合驱动挖掘机构输出运动由多个原
动件共同决定,是多自变量的函数,通过适当的控制程序就可实现复杂的运动规律,改变控制程序即可改变机构的输出运动,亦输出的柔性化,可以按预定的轨迹路线进行挖掘。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。