技术特征:
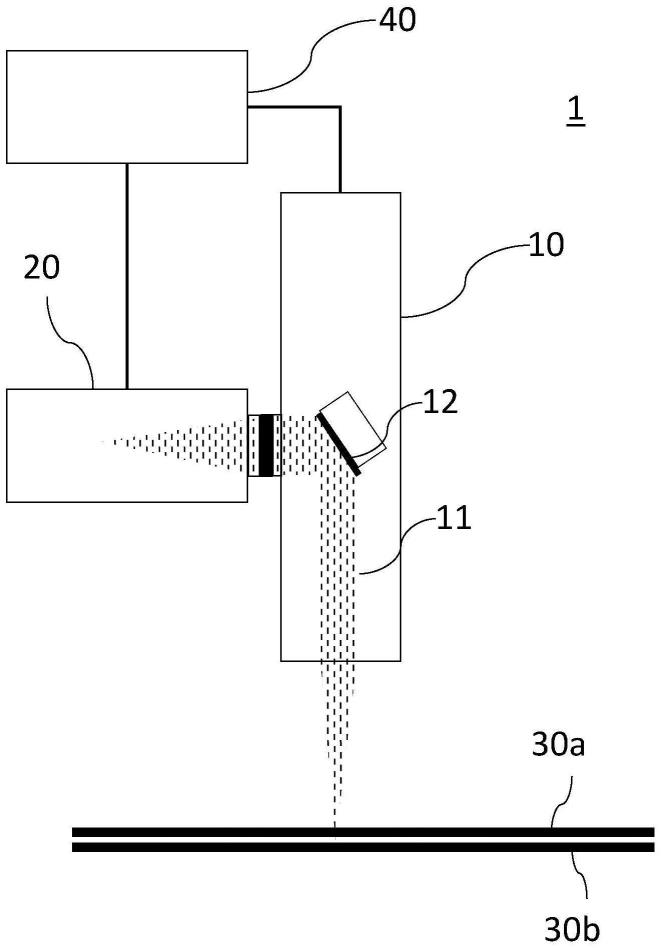
1.一种用于在激光焊接工件(30a,30b)时分析焊接连接部的方法,所述方法包括:-检测(s1)针对在所述激光焊接时产生的过程辐射的第一测量信号(p1,p2);-检测(s2)针对被所述工件(30a,30b)反射的辐射的第二测量信号(p3);-基于所述第一测量信号(p1,p2)确定(s3)在所述工件(30a,30b)之间是否存在缝隙(s);和-当确定存在缝隙(s)时,基于所述第二测量信号(p3)确定(s4)是否存在焊接连接部。2.根据权利要求1所述的方法,其中,所述经反射的辐射包括下述辐射中的至少一个辐射:所述加工激光射束的经反射的激光辐射、射入到加工区域中的led光的经反射的辐射、射入到加工区域中的领航激光射束的经反射的激光辐射。3.根据权利要求1或2所述的方法,其中,所述第一测量信号(p1,p2)和/或第二测量信号(p3)基于对辐射强度的探测。4.根据上述权利要求中任一项所述的方法,其中,在第一波长范围中检测所述第一测量信号(p1,p2),所述第一波长范围高于用于所述激光焊接的加工激光射束的波长和/或高于所述经反射的辐射的波长,和/或其中,在第二波长范围中检测所述第一测量信号(p1,p2),所述第二波长范围低于用于所述激光焊接的加工激光射束的波长和/或低于所述经反射的辐射的波长。5.根据上述权利要求中任一项所述的方法,其中,作为第一测量信号(p1,p2)被检测到的过程辐射是在红外光谱范围中的温度辐射和/或在可见光谱范围中的等离子体辐射。6.根据上述权利要求中任一项所述的方法,其中,作为第二测量信号(p3)被检测到的经反射的辐射位于红外光谱范围中、或者位于绿色的或者蓝色的可见光谱范围中。7.根据上述权利要求中任一项所述的方法,其中,对在所述工件(30a,30b)之间是否存在缝隙(s)的确定(s3)包括基于所述第一测量信号(p1,p2)确定缝隙宽度,并且其中,当所述缝隙宽度大于预给定的缝隙宽度极限值时,确定存在缝隙(s)。8.根据上述权利要求中任一项所述的方法,其中,对在所述工件(30a,30b)之间是否存在缝隙(s)的确定(s3)包括:确定所述第一测量信号(p1,p2)是否低于参考值或者参考曲线、或者下降到参考值或者参考曲线下方,其中,当所述第一测量信号(p1,p2)低于所述参考值或者所述参考曲线、或者下降到所述参考值或者所述参考曲线下方时,确定在所述工件(30a,30b)之间存在缝隙(s)。9.根据上述权利要求中任一项所述的方法,其中,对在所述工件(30a,30b)之间是否存在缝隙(s)的确定(s3)包括求所述第一测量信号(p1,p2)的第一积分和/或求所述第一测量信号(p1,p2)的第一平均值,其中,当所述第一积分低于预给定的第一积分极限值时和/或当所述第一平均值低于预给定的第一平均值极限值时,确定在所述工件(30a,30b)之间存在缝隙(s)。10.根据上述权利要求中任一项所述的方法,其中,在第一波长范围中且在第二波长范围中检测所述第一测量信号(p1,p2),所述第一波长范围高于所述经反射的辐射的波长或者高于用于所述激光焊接的加工激光射束的波长,所述第二波长范围低于所述经反射的辐射的波长或者低于用于所述激光焊接的加工激光射束的波长;对在所述工件(30a,30b)之间是否存在缝隙(s)的确定(s3)包括求在所述第一波长范围中检测到的第一测量信号(p1)的第一积分和求在所述第二波长范围中检测到的第一测量信号(p2)的第二积分,并且
其中,当所述第一积分低于预给定的第一积分极限值时和/或当所述第二积分低于预给定的第二积分极限值时,确定在所述工件(30a,30b)之间存在缝隙(s)。11.根据上述权利要求中任一项所述的方法,其中,基于所述第二测量信号(p3)的噪声确定是否存在焊接连接部。12.根据权利要求11所述的方法,其中,-当所述第二测量信号(p3)的噪声的异常值频率高于预给定的第一噪声极限值时,和/或-当所述第二测量信号(p3)的噪声的积分高于预给定的第二噪声极限值时,确定不存在焊接连接部。13.根据上述权利要求中任一项所述的方法,其中,所述工件(30a,30b)中的至少一个工件具有铝和/或铜和/或镍或者由铝和/或铜和/或镍构成。14.根据上述权利要求中任一项所述的方法,其中,所述工件中的至少一个工件具有0.10mm至0.50mm的厚度、优选具有0.15mm至0.35mm的厚度、特别优选具有0.20mm至0.30mm的厚度。15.根据上述权利要求中任一项所述的方法,其中,所述工件(30a,30b)包括第一电池的放电器和第二电池的放电器,其中,作为焊接连接部分析所述电池的放电器之间的经焊接的电接通部。16.根据上述权利要求中任一项所述的方法,其中,所述工件在激光焊接时布置在所述搭接接缝或者平行接缝中。17.一种用于激光焊接第一工件(30a)和第二工件(30b)的方法,所述方法包括以下步骤:-如此布置所述工件(30a,30b),使得所述第一工件(30a)的第一表面和所述第二工件(30b)的第一表面上下叠置;-通过将加工激光射束射入到所述第一工件(30a)的第二表面上对所述工件(30a,30b)进行激光焊接,用以在所述工件(30a,30b)之间构造焊接连接部,其中,所述第一工件(30a)的第二表面与所述第一工件(30b)的第一表面相对置,和/或通过将加工激光射束射入到所述第二工件(30b)的第二表面上进行激光焊接,用以在所述工件(30a,30b)之间构造焊接连接部,其中,所述第二工件(30b)的第二表面与所述第二工件(30b)的第一表面相对置;-执行根据上述权利要求中任一项所述的用于分析所述焊接连接部的方法。18.根据权利要求17所述的方法,其中,所述工件布置在所述搭接接缝或者平行接缝中。19.根据权利要求17或18所述的方法,其中,所述工件(30a,30b)的第一表面在至少一个区域中接触,和/或其中,在所述工件(30a,30b)的第一表面之间的另外的区域中存在缝隙。
技术总结
本发明涉及一种用于在激光焊接工件(30a,30b)时分析焊接连接部的方法,所述方法包括:检测(S1)用于在所述激光焊接时产生的过程辐射的第一测量信号(P1,P2);检测(S2)用于被所述工件(30a,30b)反射的辐射的第二测量信号(P3);基于所述第一测量信号(P1,P2)确定(S3)在所述工件之间是否存在缝隙(S);并且当确定存在缝隙(S)时,基于所述第二测量信号(P3)确定(S4)是否存在焊接连接部。定(S4)是否存在焊接连接部。定(S4)是否存在焊接连接部。
技术研发人员:J
受保护的技术使用者:普雷茨特两合公司
技术研发日:2021.02.18
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。