一种可精确定位cctv管道检测机器人
技术领域
1.本技术涉及管道检测设备领域,尤其是涉及一种可精确定位cctv管道检测机器人。
背景技术:
2.管道在石油储运、天然气运输、国防科技等方面广泛应用,大多数管道是埋于地下,这些管道的维护费力、费用昂贵且易发生安全事故,针对这一问题,相关技术中通常采用cctv管道检测机器人对管道完成检测任务。
3.cctv管道检测机器人由机器人本体、摄像镜头和地面监控系统组成。其中,机器人本体携带摄像镜头在管道中进行检测的任务;地面监测系统实时监控机器人在管道内运行情况,通过显示屏显示管道内的缺陷情况。
4.针对上述中的相关技术,发明人认为其不足之处是管道检测机器人在发现管道内存在问题时,难以精确定位,后续管道开挖需要扩大工程面积来寻找问题点,造成管道修复和路面恢复成本的增加。
技术实现要素:
5.为了改善相关技术中的管道检测机器人难以精确定位管道缺陷处的位置,导致寻找问题点的过程中成本较大的问题,本技术提供一种可精确定位cctv管道检测机器人。
6.本技术提供的一种可精确定位cctv管道检测机器人采用如下的技术方案:
7.一种可精确定位cctv管道检测机器人,包括机器人本体、连接线和地面监测系统,所述机器人本体上设置有用于对管道内部拍摄的摄像镜头,所述机器人本体与所述地面监测系统通过连接线连接,所述地面监测系统包括用于显示所述摄像镜头拍摄的画面的显示屏,所述机器人本体上设置有定位发射器,所述地面监测系统还包括用于探测定位发射器位置的手持探测仪。
8.通过采用上述技术方案,摄像镜头拍摄出来的画面传输至显示屏上,工作人员通过显示屏观测管道内的情况,当工作人员通过显示屏看到管道内的缺陷出需要进行修理的时候,控制机器人本体暂停移动,然后工作人员在检测管道的上方通过携带手持探测仪探测定位发射器的位置,当手持探测仪检测到定位发射器位于其正下方时会发出声响,从而方便工作人员对管道的缺陷处进行定位,从而对缺陷处精准开挖,降低了管道修复和路面修复的成本。
9.可选的,所述机器人本体上设置有铰接架,所述铰接架远离所述机器人本体的一端用于连接摄像镜头,所述铰接架包括第一主动杆、第二主动杆、第一从动杆和第二从动杆,所述第一从动杆和第二从动杆均与所述机器人本体铰接且相对于机器人本体的长度方向对称,所述第一主动杆和第二主动杆相对于所述第一从动杆和第二从动杆靠近摄像镜头设置,且第一主动杆和第二主动杆相对于机器人本体的长度方向对称,第一主动杆的顶端铰接有第一滑块,所述第一滑块与第一从动杆滑动连接,第二主动杆的顶端铰接有第二滑
块,所述第二滑块与第二从动杆滑动连接,所述机器人本体上设置有用于驱动第一主动杆和第二主动杆转动的驱动机构。
10.通过采用上述技术方案,驱动机构提供动力驱动第一主动杆和第二主动杆同时转动,第一主动杆和第二主动杆转动的过程中,带动第一滑块和第二滑块沿第一从动杆和第二从动杆的下表面滑动,从而带动第一从动杆和第二从动杆发生转动,以此调节铰接架的高度,扩大了摄像镜头的拍摄范围。
11.可选的,所述驱动机构包括第一电机、主动轮、从动轮和转轴,所述机器人本体的上表面设置有功能盒,所述第一电机水平设置并固定设置在所述功能盒内,所述转轴水平设置并与所述功能盒转动连接,第一主动杆固定套设在所述转轴的一端,所述第二主动杆固定套设在所述转轴的另一端,所述主动轮固定套设在所述第一电机的输出轴上,所述从动轮固定套设在所述转轴上,且所述主动轮和所述从动轮相互啮合。
12.可选的,所述功能盒开设有第一空腔和第二空腔,所述第一空腔位于第二空腔的上方,所述第一电机和所述转轴设置在所述功能盒开设第二空腔的内壁,所述定位发射器位于第一空腔内,所述功能盒的上方设置有用于打开或闭合第一空腔的滑板。
13.通过采用上述技术方案,工作人员在将检测小车放入管道之前先打开滑板,然后将定位发射器放入,再关闭滑板,对定位发射器起到保护的作用。
14.可选的,所述功能盒开设第一空腔的内壁设置有弹性卡环,所述弹性卡环的内壁抵紧在所述定位发射器的外侧壁,所述弹性卡环设置有用于对定位发射器限位的斜面。
15.通过采用上述技术方案,将定位发射器安装在弹性卡环上,弹性卡环的斜面对定位发射器具有限位的作用,进一步对定位发射器起到了保护的效果。
16.可选的, 所述滑板与所述功能盒滑动连接,所述滑板的上表面开设有凹槽,所述滑板开设凹槽的内壁连接有竖直设置的弹簧,所述弹簧远离滑板的一端固定连接有n型杆,所述功能盒的上表面开设有供所述n型杆远离弹簧的一端插入的第一插槽,当弹簧处于自然状态时,所述n型杆插入到第一插槽中。
17.通过采用上述技术方案,开始的时候,功能盒处于打开的状态,当安装完定位发射器之后,工作人员滑动滑板,然后提起n型杆,再将n型杆插入到第一插槽中进行固定,使得机器人本体在移动的过程中,滑板不容易意外脱离。
18.可选的,所述滑板的上表面开设有供所述n型杆远离弹簧的一端插入的第二插槽。
19.通过采用上述技术方案,工作人员先将n型杆提起,使n型杆脱离第一插槽,然后再转动n型杆,使n型杆对准第二插槽,再松开n型杆,使n型杆插入到第二插槽中,使得滑板处于打开的状态时,n型杆不容易晃动。
20.可选的,所述机器人本体上转动设置有用于缠绕所述连接线的绕线辊,所述绕线辊水平设置。
21.通过采用上述技术方案,开始时连接线缠绕在绕线辊中,随着机器人本体不断的向前移动,绕线辊不断的转动,从而对连接线起到收纳作用,使得连接线不容易对机器人本体的移动发生干扰。
22.综上所述,本技术包括以下至少一种有益效果:
23.摄像镜头拍摄出来的画面传输至显示屏上,工作人员通过显示屏观测管道内的情况,当工作人员通过显示屏看到管道内的缺陷出需要进行修理的时候,控制机器人本体暂
停移动,然后工作人员在检测管道的上方通过携带手持探测仪探测定位发射器的位置,当手持探测仪检测到定位发射器位于其正下方时会发出声响,从而方便工作人员对管道的缺陷处进行定位,从而对缺陷处精准开挖,降低了管道修复和路面修复的成本。
附图说明
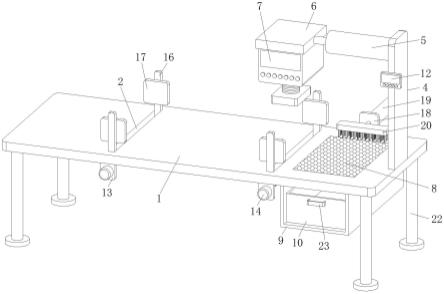
24.图1是本技术实施例一种可精确定位cctv管道检测机器人的结构示意图。
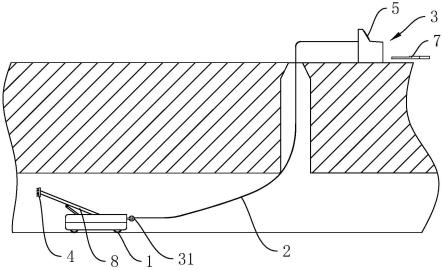
25.图2是本技术实施例中机器人本体的立体图。
26.图3是本技术实施例中功能盒的结构示意图。
27.附图标记说明:1、机器人本体;2、连接线;3、地面监测系统;4、摄像镜头;5、显示屏;6、定位发射器;7、手持探测仪;8、铰接架;9、第一主动杆;10、第二主动杆;11、第一从动杆;12、第二从动杆;13、第一滑块;14、第二滑块;15、驱动机构;16、第一电机;17、主动轮;18、从动轮;19、转轴;20、功能盒;21、第一空腔;22、第二空腔;23、滑板;24、弹性卡环;25、斜面;26、第一档板;27、第二挡板;28、n型杆;29、第一插槽;30、第二插槽;31、绕线辊;32、照明灯。
具体实施方式
28.以下结合附图1-附图3对本技术作进一步详细说明。
29.本技术实施例公开一种可精确定位cctv管道检测机器人。参照图1,可精确定位cctv管道检测机器人包括机器人本体1、连接线2和位于地面上的地面监测系统3。机器人本体1用于在管道内爬行,机器人本体1和地面监测系统3通过连接线2连接。机器人本体1包括至少两个主动行走轮、至少两个从动行走轮和用于驱动主动行走轮转动的驱动电机(图中未示出),驱动电机驱动主动行走轮转动,主动行走轮驱动从动行走轮转动,从而驱动机器人本体1在管道内的运动。
30.参照图1和图2,机器人本体1上设置有铰接架8和定位发射器6(参照图3),本技术实施例中采用的是512hz定位发射器。铰接架8远离机器人本体1的一端连接有摄像镜头4和照明灯32,地面监测系统3包括用于显示摄像镜头4拍摄的画面的显示屏5和用于探测定位发射器6发射的信号的手持探测仪7。机器人本体1上还设置有用于保护机器人本体1的第一挡板和第二挡板27,第一挡板和第二挡板27均竖直设置,机器人本体1位于第一挡板和第二挡板27的相对侧,第一挡板连接有用于缠绕连接线2的绕线辊31,绕线辊31一端与第一挡板转动连接,绕线辊31另一端与第二挡板27转动连接。
31.参照图2和图3,铰接架8包括第一主动杆9、第二主动杆10、第一从动杆11和第二从动杆12,第一从动杆11和第二从动杆12均与机器人本体1铰接且相对于机器人本体1的长度方向对称,第一主动杆9位于第一从动杆11的下方,第二主动杆10位于第二从动杆12的下方,第一主动杆9和第二主动杆10相对于机器人本体1的长度方向对称,第一主动杆9的顶端铰接有第一滑块13,第二主动杆10的顶端铰接有第二滑块14,第一滑块13位于第一从动杆11的底部并沿第一从动杆11的长度方向滑动,第二滑块14位于第二从动杆12的底部并沿第二从动杆12的长度方向滑动。机器人本体1的上表面设置有功能盒20,机器人本体1设置有用于驱动第一主动杆9和第二主动杆10转动的驱动机构15。
32.参照图3,功能盒20开设有第一空腔21和第二空腔22,第一空腔21位于第二空腔22
的上方,驱动机构15包括第一电机16、主动轮17、从动轮18和转轴19,第一电机16固定设置在功能盒20开设第二空腔22的内壁,且第一电机16水平设置,主动轮17固定套设在第一电机16的输出轴上,转轴19水平设置,第一主动杆9固定套设在转轴19的一端,第二主动杆10固定套设在转轴19的另一端,从动轮18固定套设在转轴19上,主动轮17和从动轮18相互啮合,功能盒20开设第一空腔21的内壁设置有用于连接定位发射器6的弹性卡环24,弹性卡环24的内壁抵紧在定位发射器6的外侧壁,弹性卡环24设置有用于对定位发射器6限位的斜面25。功能盒20上滑动连接有用于打开或闭合第一空腔21的滑板23,滑板23的上表面开设有凹槽,滑板23开设凹槽的内壁固定有竖直设置的弹簧(图中未示出),弹簧远离滑板23的一端固定连接有n型杆28,功能盒20的上表面开设有供n型杆28远离弹簧的一端插入的第一插槽29,当弹簧处于自然状态时,n型杆28插入到第一插槽29中。滑板23上开设有供n型杆28远离弹簧的一端插入的第二插槽30,转动n型杆28弹簧可使n型杆28插入到第二插槽30中。
33.本技术实施例一种可精确定位cctv管道检测机器人的实施原理为:工作人员将机器人本体1放入管道中,照明灯32对管道内提供光亮,驱动电机驱动机器人本体1在管道中移动,摄像镜头4拍摄画面使画面通过显示屏5显示,当工作人员通过显示屏5中的画面判断管道需要维修时,控制驱动电机暂停工作,然后手持手持探测仪7在地面上沿管道的位置进行人工探测,当手持探测仪7探测到定位发射器6位于其探测范围时会发出声响,使工作人员方便定位故障点,对故障点定点开挖,对管道修理完成之后再进行修复,降低了开挖和修复工作的成本。
34.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。